You might also like
- Strength of Materials and Structures: An Introduction to the Mechanics of Solids and StructuresFrom EverandStrength of Materials and Structures: An Introduction to the Mechanics of Solids and StructuresRating: 4 out of 5 stars4/5 (1)
- Block Diagrams: Modeling and SimulationDocument48 pagesBlock Diagrams: Modeling and SimulationAbel CabaNo ratings yet
- July 28 - Introduction To Structural Dynamics Dr. HW Huang PDFDocument52 pagesJuly 28 - Introduction To Structural Dynamics Dr. HW Huang PDFurvishNo ratings yet
- s3&s4 Physics NotesDocument224 pagess3&s4 Physics NotesTumusiime osagyefo Johnbosco AdyeeriNo ratings yet
- University of Gondar School of Technology Department of Mechanical EngineeringDocument184 pagesUniversity of Gondar School of Technology Department of Mechanical EngineeringMuket AgmasNo ratings yet
- 03 Free VibrationDocument24 pages03 Free VibrationnonaNo ratings yet
- Physics Mid-Sem CompilationDocument220 pagesPhysics Mid-Sem Compilationdhruv goraiNo ratings yet
- Dinamika Pertemuan 2Document21 pagesDinamika Pertemuan 2MUHAMAD ALIFAKBARNo ratings yet
- Part Two: Oscillations, Waves & Fluids Examples, Mechanics & MotionDocument32 pagesPart Two: Oscillations, Waves & Fluids Examples, Mechanics & MotionsteveNo ratings yet
- Basics of Dynamics and Earthquake EngineeringDocument14 pagesBasics of Dynamics and Earthquake Engineeringsumit_fm77No ratings yet
- Simple Harmonic MotionDocument23 pagesSimple Harmonic MotionAsif AliNo ratings yet
- Final Lecture11Document48 pagesFinal Lecture11ViralBipinchandraRathodNo ratings yet
- CE 7014 Chap2 Part 2Document51 pagesCE 7014 Chap2 Part 2Anonymous ep7LE5ZdP5No ratings yet
- Mechanical Waves2Document29 pagesMechanical Waves2Dennis ANo ratings yet
- Chpater 15 Mechanical WavesDocument4 pagesChpater 15 Mechanical WavescjNo ratings yet
- Static and dynamic forces explainedDocument101 pagesStatic and dynamic forces explainedFaNo ratings yet
- Mire VibrationDocument362 pagesMire VibrationMuket AgmasNo ratings yet
- 5 Application of Complex Number in Marine Engineering FieldDocument19 pages5 Application of Complex Number in Marine Engineering Fieldainul sufiahNo ratings yet
- Assignment 3Document8 pagesAssignment 319ME010 BARATH.PNo ratings yet
- CSE40418-Week 1Document70 pagesCSE40418-Week 1Michael WaYNo ratings yet
- HSSRPTR - Plus One Chapter-15-FullDocument22 pagesHSSRPTR - Plus One Chapter-15-FullSPARTANo ratings yet
- Dr. Hassan Ali Revision: ENGD1106D Mechanical Principles-DynamicsDocument75 pagesDr. Hassan Ali Revision: ENGD1106D Mechanical Principles-Dynamicslarla SinghalNo ratings yet
- Earthquake Resistant Design ConceptDocument63 pagesEarthquake Resistant Design ConceptNarender BodigeNo ratings yet
- Lecture Notes CT 4145Document132 pagesLecture Notes CT 4145Shashank BabuNo ratings yet
- OscillationsDocument7 pagesOscillationshavertz291aNo ratings yet
- Physical Principles of Vibration and Measurement TechniquesDocument9 pagesPhysical Principles of Vibration and Measurement TechniquesSonali Bangar100% (1)
- A1) IntroDocument53 pagesA1) IntrochocsoftwareNo ratings yet
- Tutorial 1 c10Document14 pagesTutorial 1 c10Priyaa JayasankarNo ratings yet
- Mechanical Vibrations Experiment Leaf PDFDocument9 pagesMechanical Vibrations Experiment Leaf PDFfariskolej4946No ratings yet
- Structural Dynamics and High Rise Buildings: Munidasa P. RanaweeraDocument59 pagesStructural Dynamics and High Rise Buildings: Munidasa P. RanaweeraManuja NallaperumaNo ratings yet
- 03 Basics of VibrationsDocument45 pages03 Basics of VibrationsAntonette DatoonNo ratings yet
- Basics of VibrationsDocument45 pagesBasics of Vibrationsravimech_862750No ratings yet
- 107 1 NTU SDS 2 1 Fundamental PeriodDocument39 pages107 1 NTU SDS 2 1 Fundamental Period陳俊鴻No ratings yet
- Mechanical Vibrations Introduction - Types, Elements, Equations of MotionDocument36 pagesMechanical Vibrations Introduction - Types, Elements, Equations of MotionMudit JainNo ratings yet
- Physics IIDocument1,525 pagesPhysics IISHK sirasapalliNo ratings yet
- MECHATRONICS ASSIGNMENT COVERS KEY CONCEPTSDocument9 pagesMECHATRONICS ASSIGNMENT COVERS KEY CONCEPTS19ME010 BARATH.PNo ratings yet
- CH 15Document25 pagesCH 15MohammedNo ratings yet
- 04 Laws of Motion Formula Sheets Quizrr PDFDocument7 pages04 Laws of Motion Formula Sheets Quizrr PDFAryan DeNo ratings yet
- SHM 1 1 - FinalDocument51 pagesSHM 1 1 - FinalDropplet MaggotNo ratings yet
- S0-250-2013 S-250-2013 Moment Tensor Analysis1 (Yagi)Document64 pagesS0-250-2013 S-250-2013 Moment Tensor Analysis1 (Yagi)ddprosNo ratings yet
- Vibrations and Waves ExplainedDocument15 pagesVibrations and Waves ExplainedDesy SafitriNo ratings yet
- Simulate Spring Oscillation ExperimentDocument8 pagesSimulate Spring Oscillation ExperimentThảo Hà NguyễnNo ratings yet
- Momemtum Transfer (CHE-1005)Document17 pagesMomemtum Transfer (CHE-1005)Sisay AmareNo ratings yet
- Oscillations - Physics WallahDocument19 pagesOscillations - Physics WallahS. OviyaNo ratings yet
- Ch2 Fluid DynamicsDocument49 pagesCh2 Fluid Dynamicsgaith syoofNo ratings yet
- Presentasi Free VibrationDocument48 pagesPresentasi Free VibrationadiNo ratings yet
- Dynamic Structures FundamentalsDocument27 pagesDynamic Structures FundamentalsIvan MuhammadNo ratings yet
- Notes08 Turbulence Flow in Thin FilmsDocument27 pagesNotes08 Turbulence Flow in Thin FilmsYuryNo ratings yet
- Chapter - 15 WavesDocument28 pagesChapter - 15 WavesTilahun ArfichoNo ratings yet
- Chapter 2 Waves and Oscillation (Compatibility Mode) PDFDocument77 pagesChapter 2 Waves and Oscillation (Compatibility Mode) PDFVaibhavNo ratings yet
- Chapter 4 (Crystal Dynamics I) (Compatibility Mode)Document58 pagesChapter 4 (Crystal Dynamics I) (Compatibility Mode)Ririn YuliaNo ratings yet
- Unless Otherwise Noted, The Content of This Course Material Is Licensed Under A Creative Commons BY 3.0 LicenseDocument20 pagesUnless Otherwise Noted, The Content of This Course Material Is Licensed Under A Creative Commons BY 3.0 LicenseAsif AliNo ratings yet
- TJD WaveNotesDocument82 pagesTJD WaveNotesTheodore Bouras-SoulimasNo ratings yet
- T2. Linear Elastic System ResponseDocument62 pagesT2. Linear Elastic System ResponseAbraham KefelegnNo ratings yet
- EUI - Static and Kinetic Coefficients of Friction ExperimentDocument22 pagesEUI - Static and Kinetic Coefficients of Friction ExperimentMohammed ZaitounNo ratings yet
- Oscillations: Simple Harmonic MotionDocument31 pagesOscillations: Simple Harmonic MotiondrfefvdsfNo ratings yet
- SHM TheoryDocument29 pagesSHM TheorySamrat ShivmaniNo ratings yet
- Introduction to Shock & Vibration FundamentalsDocument34 pagesIntroduction to Shock & Vibration Fundamentalskostarica123100% (1)
- Assignment 6 - Copy Vaibhav Sharma 2019PCS5563Document2 pagesAssignment 6 - Copy Vaibhav Sharma 2019PCS5563gauthamNo ratings yet
- Lecture04 PDFDocument5 pagesLecture04 PDFgauthamNo ratings yet
- Lecture 23Document8 pagesLecture 23gauthamNo ratings yet
- Lecture 04Document10 pagesLecture 04gauthamNo ratings yet
- Lecture - 36: Wave Propagation in Continuum SystemDocument4 pagesLecture - 36: Wave Propagation in Continuum SystemgauthamNo ratings yet
- Sustainable Construction Materials Focus on Reuse, RecyclingDocument4 pagesSustainable Construction Materials Focus on Reuse, RecyclinggauthamNo ratings yet
- Digital MarketingDocument4 pagesDigital MarketingLe GNo ratings yet
- Rehabilitation of Buildings and BridgesDocument19 pagesRehabilitation of Buildings and BridgesPratulPatil0% (1)
- Kerala Municipal Building RuleDocument105 pagesKerala Municipal Building RuleSharath Kumar KNo ratings yet
- CST Problem PDFDocument11 pagesCST Problem PDFgauthamNo ratings yet
- WeldDocument13 pagesWeldGNo ratings yet
- Gra - Global Research Analysis X 76 A Study On Crumb Rubber: Opportunities For Development of Sustainable Concrete in The New MillenniumDocument4 pagesGra - Global Research Analysis X 76 A Study On Crumb Rubber: Opportunities For Development of Sustainable Concrete in The New MillenniumgauthamNo ratings yet
- Modular Buildings in Modern ConstructionDocument18 pagesModular Buildings in Modern ConstructiongauthamNo ratings yet
- Equation of three shears & stresses in folded plateDocument1 pageEquation of three shears & stresses in folded plategauthamNo ratings yet
- Make PPT On Types of Bridge Bearings, Their Use and Suitability. 2. Make PPT On Maintenance of Bridge. 3. Make PPT Rehabilitation of BridgeDocument1 pageMake PPT On Types of Bridge Bearings, Their Use and Suitability. 2. Make PPT On Maintenance of Bridge. 3. Make PPT Rehabilitation of BridgegauthamNo ratings yet
- Use of Coconut Shells in ConcreteDocument6 pagesUse of Coconut Shells in ConcretegauthamNo ratings yet
- Outline 02Document14 pagesOutline 02Carlos Rene Mamani TrujilloNo ratings yet
- Suitability of Coconut Shell Concrete For Precast Cool Wall Panel-A ReviewDocument6 pagesSuitability of Coconut Shell Concrete For Precast Cool Wall Panel-A ReviewgauthamNo ratings yet
- Coconut Shell Concrete Strength ReviewDocument4 pagesCoconut Shell Concrete Strength ReviewUmange RanasingheNo ratings yet
- Assignment 2Document2 pagesAssignment 2gauthamNo ratings yet
- Modular Buildings in Modern ConstructionDocument14 pagesModular Buildings in Modern ConstructiongauthamNo ratings yet
- Assignment 5 Term PaperDocument13 pagesAssignment 5 Term PapergauthamNo ratings yet
- 35 FEM2015OddLecture 12 On 18th Nov 2019 (19) From Page 9Document27 pages35 FEM2015OddLecture 12 On 18th Nov 2019 (19) From Page 9gauthamNo ratings yet
- 19 FEM Lecture 07 On 16th Sept 2019 (28) POTENTIAL ENERGY PDFDocument28 pages19 FEM Lecture 07 On 16th Sept 2019 (28) POTENTIAL ENERGY PDFgauthamNo ratings yet
- 19 FEM Lecture 07 On 16th Sept 2019 (28) POTENTIAL ENERGY PDFDocument28 pages19 FEM Lecture 07 On 16th Sept 2019 (28) POTENTIAL ENERGY PDFgauthamNo ratings yet
- Integral Transforms, Pde, and Calculus of Variations: Iist LmsDocument3 pagesIntegral Transforms, Pde, and Calculus of Variations: Iist LmsPrabhash singhNo ratings yet
- Intro To CalculusDocument24 pagesIntro To CalculusCovenant AdeogoNo ratings yet
- Mukkkkk 2Document28 pagesMukkkkk 2Joshi ChumbaleNo ratings yet
- General Aptitude - Student'sDocument22 pagesGeneral Aptitude - Student'sAghaashNo ratings yet
- SCIENCE 10 Activity 2.2Document3 pagesSCIENCE 10 Activity 2.2sheila GepigaNo ratings yet
- Murray Leinster - Sidewise in TimeDocument25 pagesMurray Leinster - Sidewise in Timemiquester50% (2)
- CEP Magnetic ExtensometerDocument1 pageCEP Magnetic Extensometerlailatin latinNo ratings yet
- Wilhelm Reich Orgone and UFOsDocument113 pagesWilhelm Reich Orgone and UFOsjulliesard100% (4)
- Kunal Roy, Supratik Kar, Rudra Narayan Das - A Primer On QSAR - QSPR Modeling. Fundamental Concepts-Springer (2015)Document125 pagesKunal Roy, Supratik Kar, Rudra Narayan Das - A Primer On QSAR - QSPR Modeling. Fundamental Concepts-Springer (2015)Jayanta L CNo ratings yet
- Control Exp 8 Student ManualDocument7 pagesControl Exp 8 Student ManualSyed Nahid Ahmed TopuNo ratings yet
- Applied Mechanics BCE I/II Static Equilibrium ConceptsDocument18 pagesApplied Mechanics BCE I/II Static Equilibrium ConceptsBijay RayamajhiNo ratings yet
- Kinetics PretestDocument4 pagesKinetics PretestAngeline SmithNo ratings yet
- Modeling and FEM Analysis of Universal Joint Using Autodesk InventorDocument7 pagesModeling and FEM Analysis of Universal Joint Using Autodesk InventorIJRASETPublicationsNo ratings yet
- Steel Bridge Design Handbook (US DT FHA)Document1,974 pagesSteel Bridge Design Handbook (US DT FHA)Ulissipo1955No ratings yet
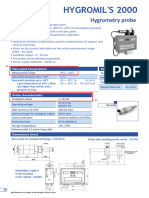
- En Hygromil'sDocument1 pageEn Hygromil'sYersson MesiasNo ratings yet
- Physics Lab Critical Angle IADocument4 pagesPhysics Lab Critical Angle IALaquando YoungNo ratings yet
- Sohib Ahmed 109Document20 pagesSohib Ahmed 109Sumit KumarNo ratings yet
- Physics 9702 Paper 1 - KinematicsDocument49 pagesPhysics 9702 Paper 1 - KinematicsTom ChanNo ratings yet
- Quantum mechanical model explains atomic orbitalsDocument15 pagesQuantum mechanical model explains atomic orbitalsNatalia SadekNo ratings yet
- SANKALP - PsdfHASE VII - GO - 4Document5 pagesSANKALP - PsdfHASE VII - GO - 4Unfortunate GamerNo ratings yet
- Gum Content in Fuels by Jet Evaporation: Standard Test Method ForDocument6 pagesGum Content in Fuels by Jet Evaporation: Standard Test Method FormuhannadNo ratings yet
- Chapter 4: AC Network Analysis Instructor NotesDocument60 pagesChapter 4: AC Network Analysis Instructor Notessong100% (1)
- Curriculum Map for Grade 9 Mathematics at Sulipan, Apalit PampangaDocument13 pagesCurriculum Map for Grade 9 Mathematics at Sulipan, Apalit PampangaRalph Francis BautistaNo ratings yet
- Ce8511 Soil Mechanics LaboratoryDocument95 pagesCe8511 Soil Mechanics LaboratoryMaran100% (1)
- UntitledDocument7 pagesUntitledKushank GuptaNo ratings yet
- Division of Bohol Lesson Plan in Science 8Document2 pagesDivision of Bohol Lesson Plan in Science 8Abello BadayosNo ratings yet
- Bis Is 9143 - 1979 (Reaffirmed 2021) - Method For The Determination of Unconfined Compressive Strength of Rock MaterialsDocument8 pagesBis Is 9143 - 1979 (Reaffirmed 2021) - Method For The Determination of Unconfined Compressive Strength of Rock MaterialsArpan NandyNo ratings yet
- Chapter 1 Coulomb's Law PDFDocument43 pagesChapter 1 Coulomb's Law PDFChitra Ashutosh Tembe50% (2)
- Relative Charge of An AtomDocument22 pagesRelative Charge of An AtomFatima M KhalifehNo ratings yet
- ETY155 Lab10 SuperpositionDocument4 pagesETY155 Lab10 SuperpositionprantiNo ratings yet