0% found this document useful (0 votes)
159 views38 pagesMultivariable Control Strategies Explained
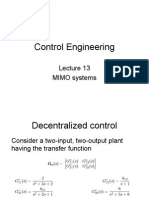
This document discusses control of multiple-input, multiple-output (MIMO) processes. It begins by introducing multiloop controllers and ways to characterize process interactions, including relative gain array (RGA) analysis and singular value analysis (SVA). It then provides definitions and examples of multiloop and multivariable control strategies. Specific topics covered include modeling MIMO processes, analyzing control loop interactions, RGA calculations for different process gain matrices, and recommendations for controller pairings based on RGA values. Figures and examples of 2x2 thermal mixing systems are also included to illustrate key concepts.
Uploaded by
praveenmandeCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PPT, PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
159 views38 pagesMultivariable Control Strategies Explained
This document discusses control of multiple-input, multiple-output (MIMO) processes. It begins by introducing multiloop controllers and ways to characterize process interactions, including relative gain array (RGA) analysis and singular value analysis (SVA). It then provides definitions and examples of multiloop and multivariable control strategies. Specific topics covered include modeling MIMO processes, analyzing control loop interactions, RGA calculations for different process gain matrices, and recommendations for controller pairings based on RGA values. Figures and examples of 2x2 thermal mixing systems are also included to illustrate key concepts.
Uploaded by
praveenmandeCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PPT, PDF, TXT or read online on Scribd