You might also like
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Digital and Non-Linear Control: Mathematical Modelling of Electrical SystemsDocument19 pagesDigital and Non-Linear Control: Mathematical Modelling of Electrical SystemsRavi BankNo ratings yet
- Modeling Dynamic SystemsDocument45 pagesModeling Dynamic Systemsyoussef hossamNo ratings yet
- Control Systems (CS)Document30 pagesControl Systems (CS)Shwetank AryanNo ratings yet
- Automatic Control Systems Lec.4Document35 pagesAutomatic Control Systems Lec.4Mohamed ElsoodyNo ratings yet
- LEC1Document84 pagesLEC1RaihanNo ratings yet
- Electrical Systems Transfer Function ModelsDocument58 pagesElectrical Systems Transfer Function ModelsNoor Ahmed86% (7)
- Lecture 4-Mathematical Modeling of Electrical SystemsDocument58 pagesLecture 4-Mathematical Modeling of Electrical SystemsNoor AhmedNo ratings yet
- REGULATION AND CONTROL MATHEMATICAL MODELINGDocument68 pagesREGULATION AND CONTROL MATHEMATICAL MODELINGhermelaNo ratings yet
- Mathematical Models and LinearizationDocument19 pagesMathematical Models and LinearizationKelvin KongNo ratings yet
- CE - Lec 3Document34 pagesCE - Lec 3Sumran ShahidNo ratings yet
- 4 Transient Response 19 NovDocument90 pages4 Transient Response 19 NovheroNo ratings yet
- Lecture-9 Modeling in Time DomainDocument39 pagesLecture-9 Modeling in Time DomainMuneeb JawaidNo ratings yet
- Modeling of Electrical SystemsDocument51 pagesModeling of Electrical SystemsCheems PandeyNo ratings yet
- Control Theory I Lec. 4: Mathematical Modeling of Electrical & Electronic Systems & Mechanical SystemsDocument67 pagesControl Theory I Lec. 4: Mathematical Modeling of Electrical & Electronic Systems & Mechanical Systemsdream breaker100% (1)
- Lecture-2 Transfer FunctionDocument32 pagesLecture-2 Transfer FunctionMuneeb JawaidNo ratings yet
- Week 7 - Control System Part 2Document33 pagesWeek 7 - Control System Part 2Amar MursyidNo ratings yet
- Module 2b - TF of Electrical and Mechanical SystemsDocument61 pagesModule 2b - TF of Electrical and Mechanical SystemsSyed Muhammad AliNo ratings yet
- Linear Control Systems (LCS) Transfer Function and StabilityDocument34 pagesLinear Control Systems (LCS) Transfer Function and StabilityRIMSHA KHURSHID100% (1)
- C-Transient ResponseDocument17 pagesC-Transient ResponseAnanthan SrijithNo ratings yet
- Linear System Theory Lecture OverviewDocument49 pagesLinear System Theory Lecture OverviewMuhammad HassanNo ratings yet
- Control Systems (CS) : Lecture-2 Transfer Function and Stability of LTI SystemsDocument35 pagesControl Systems (CS) : Lecture-2 Transfer Function and Stability of LTI SystemsAdil KhanNo ratings yet
- State-Space Modeling of Control SystemsDocument11 pagesState-Space Modeling of Control SystemsSyed Hussain Akbar MosviNo ratings yet
- Feedback Control Systems (FCS) : Lecture-2 Transfer Function and Stability of LTI SystemsDocument29 pagesFeedback Control Systems (FCS) : Lecture-2 Transfer Function and Stability of LTI SystemsRomadhonFitriyantoNo ratings yet
- Modeling and Simulation: Variables and State EquationsDocument15 pagesModeling and Simulation: Variables and State EquationsLatif KebbabiNo ratings yet
- 02-03 SSA - Signals and SystemsDocument28 pages02-03 SSA - Signals and SystemsEssa Zulfikar SalasNo ratings yet
- Feedback Control Systems (FCS) : Lecture-3 & 4 Transfer Function and Stability of LTI SystemsDocument30 pagesFeedback Control Systems (FCS) : Lecture-3 & 4 Transfer Function and Stability of LTI SystemsZaheer AhamedNo ratings yet
- R. W. EricksonDocument51 pagesR. W. EricksonVanshika JindalNo ratings yet
- ME451: Control Systems Course RoadmapDocument5 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- Signals & Systems Concepts ExplainedDocument20 pagesSignals & Systems Concepts Explainedبدر عسيريNo ratings yet
- Lecture 04Document29 pagesLecture 04AB 26No ratings yet
- Feedback Control Systems (FCS) : Lecture-6 Mathematical Modelling of Electrical & Electronic SystemsDocument30 pagesFeedback Control Systems (FCS) : Lecture-6 Mathematical Modelling of Electrical & Electronic SystemsSuyash Dahake VlogsNo ratings yet
- RLC Circuit Transfer Functions - KSB - 03 Aug 2020Document44 pagesRLC Circuit Transfer Functions - KSB - 03 Aug 2020Kì Hyö JüngNo ratings yet
- Signals & Systems Concepts Week 01 Session 1,2,3: - Institut Teknologi DelDocument19 pagesSignals & Systems Concepts Week 01 Session 1,2,3: - Institut Teknologi DelDaniel Fernando PurbaNo ratings yet
- Linear Control Systems: Laplace Transforms & System ModelingDocument26 pagesLinear Control Systems: Laplace Transforms & System ModelingGOD oF DeAtHNo ratings yet
- Lecture 3: Transfer Function & Response: Process Dynamic & ControlDocument34 pagesLecture 3: Transfer Function & Response: Process Dynamic & Controlyussra amerNo ratings yet
- Transfer Functions of RLC Circuits SolveDocument44 pagesTransfer Functions of RLC Circuits SolveReena ExpNo ratings yet
- 1091 Circuit Theory HW1 Solution: Tera T Giga G (Femto FDocument5 pages1091 Circuit Theory HW1 Solution: Tera T Giga G (Femto F曾燒餅No ratings yet
- Lecture 4:sampling and Reconstruction: - Sampling - Data Reconstruction (Hold) - Reading: Chapter 3 of The TextbookDocument15 pagesLecture 4:sampling and Reconstruction: - Sampling - Data Reconstruction (Hold) - Reading: Chapter 3 of The TextbookmumtazNo ratings yet
- Differential Equation & Transfer Function: Dinamika Sistem & SimulasiDocument39 pagesDifferential Equation & Transfer Function: Dinamika Sistem & SimulasiDesliana RamadoniNo ratings yet
- State Space Averaging ExplainedDocument50 pagesState Space Averaging ExplainedSomnath MaityNo ratings yet
- Feedback Control Theory: A Computer System's PerspectiveDocument52 pagesFeedback Control Theory: A Computer System's PerspectiveAlberto Garcia CarrilloNo ratings yet
- Control Systems (CS) : Lecture-2 Laplace Transform Transfer Function and Stability of LTI SystemsDocument41 pagesControl Systems (CS) : Lecture-2 Laplace Transform Transfer Function and Stability of LTI Systemskamranzeb057No ratings yet
- Modeling State Variable SystemsDocument47 pagesModeling State Variable SystemsEngr Abdul QadeerNo ratings yet
- Analysis of Discrete Linear SystemsDocument41 pagesAnalysis of Discrete Linear SystemsRiddhijit ChattopadhyayNo ratings yet
- Buck-Boost Converter Analysis and DesignDocument3 pagesBuck-Boost Converter Analysis and DesignNurujjamanKhan0% (1)
- Lecture 2Document47 pagesLecture 2Houssam moussaNo ratings yet
- Chapter 3 Part IDocument68 pagesChapter 3 Part IDaniel MengeshaNo ratings yet
- What Is A System?: 1 Dr. B. Khan CECOS UniversityDocument45 pagesWhat Is A System?: 1 Dr. B. Khan CECOS UniversityUmer EhsanNo ratings yet
- Chapter 2 - Modeling in Fequency Domain (Part 2)Document24 pagesChapter 2 - Modeling in Fequency Domain (Part 2)Thanes WaranNo ratings yet
- 10 First-Order Circuits (Part 2) NotedDocument22 pages10 First-Order Circuits (Part 2) NotedBrandon CilNo ratings yet
- Chapter 2Document66 pagesChapter 2chalaNo ratings yet
- Control Systems Theory: Transfer Function of Physical Systems STB 35103Document108 pagesControl Systems Theory: Transfer Function of Physical Systems STB 35103Akula Veerraju100% (1)
- Lect Chapter 2Document25 pagesLect Chapter 2ricetNo ratings yet
- Presentation STATCOM by Anant NarulaDocument25 pagesPresentation STATCOM by Anant NarulaRizwan RafiqueNo ratings yet
- State SpaceDocument20 pagesState SpaceJazzy BieberNo ratings yet
- Time Domain Response of First Order RL and RC CircuitsDocument21 pagesTime Domain Response of First Order RL and RC CircuitsMOHSINALI MOMINNo ratings yet
- Transfer Function Basics & Transfer Function and StabilityDocument31 pagesTransfer Function Basics & Transfer Function and StabilityArvind kumar PrajapatiNo ratings yet
- Control Systems Theory: Transfer Function of Physical SystemsDocument108 pagesControl Systems Theory: Transfer Function of Physical SystemsMelanieNo ratings yet
- Transfer Function and Stability AnalysisDocument29 pagesTransfer Function and Stability AnalysisJane Erestain BuenaobraNo ratings yet
- ACS Transfer Functions and StabilityDocument22 pagesACS Transfer Functions and StabilityFahmeed Ali MeoNo ratings yet
- Introduction To State Space Modeling Analysis-1Document14 pagesIntroduction To State Space Modeling Analysis-1Fahmeed Ali MeoNo ratings yet
- Closed and Open Loop ExamplesDocument11 pagesClosed and Open Loop ExamplesFahmeed Ali MeoNo ratings yet
- S&A Optical Encoders PDFDocument34 pagesS&A Optical Encoders PDFNiravNo ratings yet
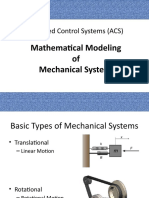
- Advanced Control Systems (ACS) : Mathematical Modeling of Mechanical SystemsDocument19 pagesAdvanced Control Systems (ACS) : Mathematical Modeling of Mechanical SystemsFahmeed Ali MeoNo ratings yet
- Power Electronics Lec 9,10Document7 pagesPower Electronics Lec 9,10Fahmeed Ali MeoNo ratings yet
- Temperature, Light & Pressure SensorsDocument60 pagesTemperature, Light & Pressure SensorsHaider-e-KararNo ratings yet
- Overview of Signal Flow GraphsDocument45 pagesOverview of Signal Flow GraphsFahmeed Ali MeoNo ratings yet
- Power Electronics Lec 8Document14 pagesPower Electronics Lec 8Fahmeed Ali MeoNo ratings yet
- MechanicsDocument15 pagesMechanicsFahmeed Ali MeoNo ratings yet
- Power Electronics Lec 6Document10 pagesPower Electronics Lec 6Fahmeed Ali MeoNo ratings yet
- Belt Drives and Chain Drives: 1 Syed Shahzeb SamiDocument44 pagesBelt Drives and Chain Drives: 1 Syed Shahzeb SamiFahmeed Ali MeoNo ratings yet
- Power Electronics Lec 7Document7 pagesPower Electronics Lec 7Fahmeed Ali MeoNo ratings yet
- Power Electronics Lec 12Document11 pagesPower Electronics Lec 12Fahmeed Ali MeoNo ratings yet
- Power Electronics Lec.Document10 pagesPower Electronics Lec.Fahmeed Ali MeoNo ratings yet
- Power Electronics Lec4.Document13 pagesPower Electronics Lec4.Fahmeed Ali MeoNo ratings yet
- Introduction To Engineering Materials: Types of Enginnering MaterialsDocument41 pagesIntroduction To Engineering Materials: Types of Enginnering MaterialsFahmeed Ali MeoNo ratings yet
- Lesson 5 03-25-2017Document55 pagesLesson 5 03-25-2017Fahmeed Ali MeoNo ratings yet
- Factory Automation: By: Engr Syed Shahzeb SamiDocument15 pagesFactory Automation: By: Engr Syed Shahzeb SamiFahmeed Ali MeoNo ratings yet
- By: Engr Syed Shahzeb Sami 1Document6 pagesBy: Engr Syed Shahzeb Sami 1Fahmeed Ali MeoNo ratings yet
- Ab 4Document1 pageAb 4Ashish BarwadNo ratings yet
- Lesson 3 04-11-2017Document48 pagesLesson 3 04-11-2017Fahmeed Ali MeoNo ratings yet
- Power Transmission Systems: Gear DrivesDocument18 pagesPower Transmission Systems: Gear DrivesFahmeed Ali MeoNo ratings yet
- Lesson 4 03-18-2017Document47 pagesLesson 4 03-18-2017Fahmeed Ali MeoNo ratings yet
- Notes ChineseDocument5 pagesNotes ChineseFahmeed Ali MeoNo ratings yet
- Module - V: Electrical MeasurementsDocument31 pagesModule - V: Electrical MeasurementsSaandeep Reddipalli 21BCE2885No ratings yet
- Assignment 7Document2 pagesAssignment 7Lihle Ayabonga NcambacaNo ratings yet
- Question Paper Robotics and Arduino ProgrammingDocument1 pageQuestion Paper Robotics and Arduino Programmingveeramaniks408No ratings yet
- Instrument List for Chemical Process SectionDocument18 pagesInstrument List for Chemical Process SectionGoogool YNo ratings yet
- Paradox Spectra RTX3 Programming/Reference ManualDocument2 pagesParadox Spectra RTX3 Programming/Reference ManualHayden WilsonNo ratings yet
- Slu - Lloren, Anjelo Michael - Power TransformerDocument8 pagesSlu - Lloren, Anjelo Michael - Power TransformerGyver AquinoNo ratings yet
- Index & Warnings: Service ManualDocument10 pagesIndex & Warnings: Service ManualAnonymous Syjpyt4MoNo ratings yet
- PriceList Schneider Electric JAN 2018 Issue V1Document8 pagesPriceList Schneider Electric JAN 2018 Issue V1Plaka food IndonesiaNo ratings yet
- Final Earthing V3Document22 pagesFinal Earthing V3RewanEsamNo ratings yet
- ECOSYS P2235dw-P2040dw SERVICE MANUAL 4Document73 pagesECOSYS P2235dw-P2040dw SERVICE MANUAL 4Ivan AvilaNo ratings yet
- Service: ManualDocument155 pagesService: Manualdennischauvin3973No ratings yet
- Breadboard ActivityDocument6 pagesBreadboard ActivityVanjeff ZurcNo ratings yet
- Generator Set Data Sheet: 825 kVA StandbyDocument3 pagesGenerator Set Data Sheet: 825 kVA StandbydukegarrikNo ratings yet
- Weighbeam DWB40-200 TDocument4 pagesWeighbeam DWB40-200 TdassoumennNo ratings yet
- LDC6 400 L16Document2 pagesLDC6 400 L16npNo ratings yet
- Service Manual: ChassisDocument39 pagesService Manual: Chassisefrain villazonNo ratings yet
- ML 20 EsDocument8 pagesML 20 EsMohamed Karakache50% (2)
- 32 5 Buses - Syn Chronous and Asynchronous 15-11-2021 (15 Nov 2021) Material - I - 15!11!2021 - Unit 5 Lecture5Document11 pages32 5 Buses - Syn Chronous and Asynchronous 15-11-2021 (15 Nov 2021) Material - I - 15!11!2021 - Unit 5 Lecture5Mudit JainNo ratings yet
- Aseptico ARU-HF70 Field Dental X-Ray - Maintenance ManualDocument17 pagesAseptico ARU-HF70 Field Dental X-Ray - Maintenance ManualStevenNo ratings yet
- 93.0.940 PTD-Fire-Alarm-Panel-R1.23Document47 pages93.0.940 PTD-Fire-Alarm-Panel-R1.23Ralph FranzoiNo ratings yet
- (Online) : ABU Asia-Pacific Robot Contest 2022 New Delhi, IndiaDocument16 pages(Online) : ABU Asia-Pacific Robot Contest 2022 New Delhi, IndiaNirmal Prasad PantaNo ratings yet
- Manual Servos FanucDocument658 pagesManual Servos FanucGerman Lag100% (1)
- Suzlon S95 Turbine Exceeds Power ProjectionsDocument2 pagesSuzlon S95 Turbine Exceeds Power ProjectionsAdriano MunizNo ratings yet
- COA Lecture 20Document26 pagesCOA Lecture 20Chhaveesh AgnihotriNo ratings yet
- C121ADocument3 pagesC121AMaiChiVuNo ratings yet
- BaylorDocument140 pagesBaylorjairoleonx542691% (11)
- bs3 - UNIT 1,2&3Document108 pagesbs3 - UNIT 1,2&3Saran T SNo ratings yet
- 2 A 20112 ADocument9 pages2 A 20112 AEdgard DelRioNo ratings yet
- Sitop Library Pcs7 enDocument2 pagesSitop Library Pcs7 enEICHMANNo ratings yet
- MCS Midterm 1 - PreviousDocument9 pagesMCS Midterm 1 - PreviouspfmiirNo ratings yet