You might also like
- 3-Robotic sensors-20-Jul-2020Material - I - 20-Jul-2020 - Overview - of - Sensors - For - RoboticsDocument117 pages3-Robotic sensors-20-Jul-2020Material - I - 20-Jul-2020 - Overview - of - Sensors - For - RoboticsSPARSH RAJNo ratings yet
- LN1b - SensorsDocument35 pagesLN1b - Sensorsmeen87No ratings yet
- Grey Code and Binary CodeDocument2 pagesGrey Code and Binary CodemicaNo ratings yet
- Sensors: Microprocessor Control of Manufacturing Systems and Introduction To MechatronicsDocument58 pagesSensors: Microprocessor Control of Manufacturing Systems and Introduction To MechatronicsHassan ZafarNo ratings yet
- Rotary EncodersDocument27 pagesRotary EncodersIhuhwa Marta Tau100% (2)
- Rotary EncoderDocument30 pagesRotary EncoderThọ ĐỗNo ratings yet
- Optical Encoders, Laser Interferometer, LVDT: Rushi Vyas Xiaoyu Ding Lei YangDocument55 pagesOptical Encoders, Laser Interferometer, LVDT: Rushi Vyas Xiaoyu Ding Lei Yangrevathi tellakulaNo ratings yet
- Study Material For Lecture 5Document13 pagesStudy Material For Lecture 5Aviral UpadhyayNo ratings yet
- Encoder 2Document5 pagesEncoder 2mohamedsamimorsiNo ratings yet
- Rotary Encoder Training MaterialDocument30 pagesRotary Encoder Training MaterialLuckyboybk FCNo ratings yet
- DAC With 8051Document18 pagesDAC With 8051BharathNo ratings yet
- Digital Encoders: Absolute EncoderDocument4 pagesDigital Encoders: Absolute Encoder07me07No ratings yet
- Adc Dac 151106181601 Lva1 App6892 PDFDocument29 pagesAdc Dac 151106181601 Lva1 App6892 PDFeddula ganeshNo ratings yet
- By Samik Dutta, Somnath Chatterjee, Ranjan Sen CMERI DurgapurDocument15 pagesBy Samik Dutta, Somnath Chatterjee, Ranjan Sen CMERI DurgapurSamik DuttaNo ratings yet
- Digipot Rotary EncoderDocument12 pagesDigipot Rotary EncoderGowtham VinnuNo ratings yet
- Digital Logic Design: Lecture 2 - Number SystemsDocument50 pagesDigital Logic Design: Lecture 2 - Number SystemsMD Sadique AnsariNo ratings yet
- Test Object - Device SettingsDocument32 pagesTest Object - Device SettingsEngr Fahimuddin QureshiNo ratings yet
- OLD AUTOMATION Midterm-Exam SolutionDocument2 pagesOLD AUTOMATION Midterm-Exam SolutionsilverhandxNo ratings yet
- Summary and Objective:: Power ThyristorDocument10 pagesSummary and Objective:: Power ThyristorA. AlghamdiNo ratings yet
- Absolute Rotary EncoderDocument7 pagesAbsolute Rotary EncoderNanda DeepaNo ratings yet
- Columna C-1: CombDocument8 pagesColumna C-1: CombJohan Barrionuevo CrisantoNo ratings yet
- EP50S Series: Diameter Ø50mm Shaft Type Absolute Rotary EncoderDocument5 pagesEP50S Series: Diameter Ø50mm Shaft Type Absolute Rotary EncoderEeeeeNo ratings yet
- Review: MULTIPLY HARDWARE Version 1: °64-Bit Multiplicand Reg, 64-Bit ALU, 64-Bit Product RegDocument6 pagesReview: MULTIPLY HARDWARE Version 1: °64-Bit Multiplicand Reg, 64-Bit ALU, 64-Bit Product RegNarender KumarNo ratings yet
- High Resolution Low Cost ADC. Made Possible by The Chips That Integrate Both Analog and Digital CircuitryDocument13 pagesHigh Resolution Low Cost ADC. Made Possible by The Chips That Integrate Both Analog and Digital Circuitrymhd kdaimatiNo ratings yet
- Digital vs. Analog Control SystemsDocument33 pagesDigital vs. Analog Control SystemsAbril de Vera100% (1)
- Lab Report InstrumentationDocument9 pagesLab Report InstrumentationNur Razanah Mohd YasinNo ratings yet
- ADC To Volts MatrixDocument26 pagesADC To Volts Matrixshrek77139No ratings yet
- Logical Addressing & Subnetting: Chapter - 3Document146 pagesLogical Addressing & Subnetting: Chapter - 3AviralNo ratings yet
- Beam 230 Moving Head LightDocument8 pagesBeam 230 Moving Head LightWorldwide NewsNo ratings yet
- Apex Institute of Technology Computer Organization & Architecture (CST-281)Document38 pagesApex Institute of Technology Computer Organization & Architecture (CST-281)Sam SainiNo ratings yet
- ECE4680 Computer Organization & Architecture Divide, Floating Point, Pentium BugDocument17 pagesECE4680 Computer Organization & Architecture Divide, Floating Point, Pentium BugNarender KumarNo ratings yet
- Open Ended Experiment: Digital Electronics and Computer OrganizationDocument4 pagesOpen Ended Experiment: Digital Electronics and Computer OrganizationHarshit AggarwalNo ratings yet
- Generating Sine Wave Using 8051Document5 pagesGenerating Sine Wave Using 8051zakavisionNo ratings yet
- Signed Binary AdditionDocument57 pagesSigned Binary AdditionMuthukumar ManickamNo ratings yet
- Digital Integrated Circuits: Traian Tulbure NII13Document55 pagesDigital Integrated Circuits: Traian Tulbure NII13boymatterNo ratings yet
- 04 90 HW - w4 - Jaime - Leon 90 PDFDocument22 pages04 90 HW - w4 - Jaime - Leon 90 PDFtripijbNo ratings yet
- Representation of Analog ValuesDocument5 pagesRepresentation of Analog Valuesmahamd saiedNo ratings yet
- WINSEM2019-20 CSE4019 ETH VL2019205002464 Reference Material I 12-Dec-2019 Point TransformationsDocument20 pagesWINSEM2019-20 CSE4019 ETH VL2019205002464 Reference Material I 12-Dec-2019 Point TransformationsApurv ChoudharyNo ratings yet
- FALLSEM2023-24 MDI4012 ETH VL2023240103465 2023-08-03 Reference-Material-IIDocument21 pagesFALLSEM2023-24 MDI4012 ETH VL2023240103465 2023-08-03 Reference-Material-IIMd Rushd Al AminNo ratings yet
- Direccionamiento Ipv4Document101 pagesDireccionamiento Ipv4Jefferson OrtizNo ratings yet
- Modul Minggu Ke-2 (DB6 Dan DB7)Document15 pagesModul Minggu Ke-2 (DB6 Dan DB7)Eden HamamNo ratings yet
- Analog Value RepresentationDocument21 pagesAnalog Value RepresentationRendi FebrianNo ratings yet
- Compact GoniophotometerDocument26 pagesCompact Goniophotometerlisun008No ratings yet
- T60 - SimulatorDocument5 pagesT60 - Simulatorshanthikumaravel0% (1)
- Ecumaster Wheelspeedtocan: ManualDocument10 pagesEcumaster Wheelspeedtocan: Manualcj gmxNo ratings yet
- Soniya Kaviratna - Data Representation Methods in The Computer System (Number Systems)Document30 pagesSoniya Kaviratna - Data Representation Methods in The Computer System (Number Systems)qshmkdjtuakrppwxetNo ratings yet
- Digital Electronics NewDocument131 pagesDigital Electronics NewPardeep SharmaNo ratings yet
- Chapter 0 - Introduction To ComputingDocument43 pagesChapter 0 - Introduction To ComputingBuket CüvelenkNo ratings yet
- SERVICE MANUAL COLOR MONITOR NEC MultiSync 20WGX2 MODEL ID: 20WGX2-BK (B)Document143 pagesSERVICE MANUAL COLOR MONITOR NEC MultiSync 20WGX2 MODEL ID: 20WGX2-BK (B)Mikhail100% (1)
- T60diffsimulatorDocument8 pagesT60diffsimulatorAns MehmoodNo ratings yet
- NMT1312-Plus-neon Specification - A01 (48V)Document11 pagesNMT1312-Plus-neon Specification - A01 (48V)SALV2049No ratings yet
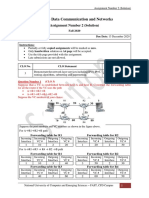
- Assignment 2 SolutionDocument5 pagesAssignment 2 SolutionRaza KazmiNo ratings yet
- DSP Unit 1 Lecture NotesDocument40 pagesDSP Unit 1 Lecture Notesgowri thumburNo ratings yet
- Feilo Sylvania 3036756 Lumipanel LED 600, 52W, 4000K, DB 1xLUMIPANEL LED 52W 600 NWDocument3 pagesFeilo Sylvania 3036756 Lumipanel LED 600, 52W, 4000K, DB 1xLUMIPANEL LED 52W 600 NWJonathan MaldonadoNo ratings yet
- Homework 3 SolDocument3 pagesHomework 3 SolAlison LeeNo ratings yet
- FPGAArithmetic XilinxDocument96 pagesFPGAArithmetic Xilinxksreddy2002No ratings yet
- Digital Electronics For Engineering and Diploma CoursesFrom EverandDigital Electronics For Engineering and Diploma CoursesNo ratings yet
- Troubleshooting & Repairing Consumer Electronics Without a SchematicFrom EverandTroubleshooting & Repairing Consumer Electronics Without a SchematicNo ratings yet
- Introduction To Sensors: Edited From: Sookram SobhanDocument52 pagesIntroduction To Sensors: Edited From: Sookram SobhanJongin KimNo ratings yet
- I/O Mikrokontroller: Abyanuddin Salam POLMAN BandungDocument33 pagesI/O Mikrokontroller: Abyanuddin Salam POLMAN BandungJongin KimNo ratings yet
- Pembahasan Verb PDFDocument4 pagesPembahasan Verb PDFabid ArdiansyahNo ratings yet
- Materi Belajar VerbDocument13 pagesMateri Belajar VerbJongin KimNo ratings yet
- Automatic Clothesline REVISEDDocument8 pagesAutomatic Clothesline REVISEDJongin KimNo ratings yet
- Kurva Karakteristik Arus Terhadap Intensitas CahayaDocument3 pagesKurva Karakteristik Arus Terhadap Intensitas CahayaJongin KimNo ratings yet
- Fib Lucas StaDocument5 pagesFib Lucas StafabriziomaccalliniNo ratings yet
- M. Fatur - H1C018040 - PETROLOGIDocument15 pagesM. Fatur - H1C018040 - PETROLOGIFaturrachmanNo ratings yet
- Flexenclosure Esite Brochure PDFDocument5 pagesFlexenclosure Esite Brochure PDFajdCruiseNo ratings yet
- Spark: Owner's ManualDocument5 pagesSpark: Owner's Manualjorge medinaNo ratings yet
- Corner ReflectorDocument1 pageCorner ReflectorYashNo ratings yet
- Pioneer Car Stereo System DVH-735AVDocument85 pagesPioneer Car Stereo System DVH-735AVJs LópezNo ratings yet
- 145Kv Sf6 Circuit Breaker Type Ltb145D1/B List of Drawings: Description Document Reference NO. SRDocument13 pages145Kv Sf6 Circuit Breaker Type Ltb145D1/B List of Drawings: Description Document Reference NO. SRneeraj100% (1)
- Decision-Making Under Risk and Uncertainty: OutcomesDocument21 pagesDecision-Making Under Risk and Uncertainty: OutcomesprabodhNo ratings yet
- Articles On SidisDocument146 pagesArticles On SidisMircea492003100% (1)
- Simple Harmonic Oscillator: 1 HamiltonianDocument10 pagesSimple Harmonic Oscillator: 1 HamiltonianAbdurrahman imamNo ratings yet
- Project 10-Fittings DesignDocument10 pagesProject 10-Fittings DesignVishwasen KhotNo ratings yet
- Chord Tone Improvisation Part IDocument38 pagesChord Tone Improvisation Part I2018 01097No ratings yet
- Ergonomic DesignDocument132 pagesErgonomic DesignErin WalkerNo ratings yet
- 307-01 Automatic Transmission 10 Speed - Description and Operation - DescriptionDocument12 pages307-01 Automatic Transmission 10 Speed - Description and Operation - DescriptionCARLOS LIMADANo ratings yet
- Book Review: Laser Fundamentals, 2nd Edition by William T. SilfvastDocument2 pagesBook Review: Laser Fundamentals, 2nd Edition by William T. SilfvastAbhishekNo ratings yet
- 02 WholeDocument344 pages02 WholeedithgclemonsNo ratings yet
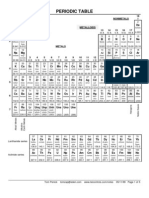
- Periodic Table and AtomsDocument5 pagesPeriodic Table and AtomsShoroff AliNo ratings yet
- Life Processes: Science Unit 1Document19 pagesLife Processes: Science Unit 1patil pratikNo ratings yet
- DA Savitz - Interpreting Epidemiologic Evidence - Strategies For Study Design and Analysis 2003 PDFDocument329 pagesDA Savitz - Interpreting Epidemiologic Evidence - Strategies For Study Design and Analysis 2003 PDFrindy_bilhaniNo ratings yet
- Database Programming With SQL 12-3: DEFAULT Values, MERGE, and Multi-Table Inserts Practice ActivitiesDocument2 pagesDatabase Programming With SQL 12-3: DEFAULT Values, MERGE, and Multi-Table Inserts Practice ActivitiesFlorin CatalinNo ratings yet
- (Complete) Electrolysis of Copper SulphateDocument4 pages(Complete) Electrolysis of Copper SulphateNoooooNo ratings yet
- EC 201 Network TheoryDocument2 pagesEC 201 Network TheoryJoseph JohnNo ratings yet
- Water Levels Forecast in Thailand: A Case Study of Chao Phraya RiverDocument6 pagesWater Levels Forecast in Thailand: A Case Study of Chao Phraya RiverErna UtamiNo ratings yet
- KVS - Regional Office, JAIPUR - Session 2021-22Document24 pagesKVS - Regional Office, JAIPUR - Session 2021-22ABDUL RAHMAN 11BNo ratings yet
- 7FA Upgrade Combustion HardwareDocument2 pages7FA Upgrade Combustion Hardwaresauerbach1No ratings yet
- Testing, Adjusting, and Balancing - TabDocument19 pagesTesting, Adjusting, and Balancing - TabAmal Ka100% (1)
- Plagiarism - ReportDocument6 pagesPlagiarism - ReportDipesh NagpalNo ratings yet
- Ethoxy 1Document77 pagesEthoxy 1HoshiNo ratings yet
- Fractal Cities - A Geometry of Form and Function PDFDocument432 pagesFractal Cities - A Geometry of Form and Function PDFDavid Diaz100% (1)