You might also like
- DC ServomotorDocument16 pagesDC ServomotorNSS18EE048 BILINE KCNo ratings yet
- DC ServomotorDocument3 pagesDC ServomotorAshutosh Prakash MishraNo ratings yet
- Answer: Control System (Unit 1)Document18 pagesAnswer: Control System (Unit 1)Ajeet Kumar shuklaNo ratings yet
- Electrial Machines Second ReportDocument7 pagesElectrial Machines Second ReportMohamed YahiaNo ratings yet
- Synchronous Motor Drives: Open Loop V/F Control of Synchronous MotorDocument11 pagesSynchronous Motor Drives: Open Loop V/F Control of Synchronous MotorSaish Dalvi100% (1)
- ECNG-4010 Lecture 05Document37 pagesECNG-4010 Lecture 05Abel BatuNo ratings yet
- Lecture 6Document31 pagesLecture 6amanuel abrehaNo ratings yet
- Speed Control of DC MotorsDocument27 pagesSpeed Control of DC MotorsBabuKannanNo ratings yet
- Direct Torque Control (DTC) in Induction Motor: M.G.MorshadDocument12 pagesDirect Torque Control (DTC) in Induction Motor: M.G.MorshadAdil FarzandNo ratings yet
- Electric DrivesDocument35 pagesElectric Drivesbabli.panchal1984No ratings yet
- Topic: DC Motor Using Mechanical Application: New Era University College of Engineering and TechnologyDocument13 pagesTopic: DC Motor Using Mechanical Application: New Era University College of Engineering and TechnologyMAr Lon Dela CruzNo ratings yet
- ActuatorDocument61 pagesActuatorforeverdieselNo ratings yet
- Ac-Dc-Servomotor-Net NotesDocument9 pagesAc-Dc-Servomotor-Net NotesDINESHKUMAR SNo ratings yet
- Servo MoDocument10 pagesServo MonatiNo ratings yet
- Unit - V Synchronous Drives: 1 Variable Frequency ControlDocument22 pagesUnit - V Synchronous Drives: 1 Variable Frequency ControlHaripriya PalemNo ratings yet
- Industrial Drive Unit 1Document24 pagesIndustrial Drive Unit 1Nilanjan PodderNo ratings yet
- VVVF Drive PresentationDocument19 pagesVVVF Drive PresentationKirti BedpuriyaNo ratings yet
- Servo MotorDocument11 pagesServo MotorBotlhe SomolekaeNo ratings yet
- Machine Tool DrivesDocument21 pagesMachine Tool DrivesChaitanyaSrivastava100% (1)
- Theory DC ServoMDocument3 pagesTheory DC ServoMKaustubh DesaiNo ratings yet
- DriveMotorBasics01 PDFDocument11 pagesDriveMotorBasics01 PDFSundar Kumar Vasantha GovindarajuluNo ratings yet
- Question No 1: Speed Control of DC MotorDocument10 pagesQuestion No 1: Speed Control of DC MotorProxima YusNo ratings yet
- EM Assignment 2Document7 pagesEM Assignment 2M.Vijaya VarshiniNo ratings yet
- Infant Monitoring System Using Co2 Sensor-Project ReportDocument59 pagesInfant Monitoring System Using Co2 Sensor-Project ReportRajesh Kumar0% (1)
- Speed Control of DC MotorDocument31 pagesSpeed Control of DC Motorabhinav. alpheus651997No ratings yet
- NNS Notes ServomotorDocument9 pagesNNS Notes ServomotorNarendra SinhaNo ratings yet
- DC and AC Motor ControlDocument6 pagesDC and AC Motor Controldes tosNo ratings yet
- Electric Vehicle 4th ModuleDocument19 pagesElectric Vehicle 4th ModuleSimi BaniNo ratings yet
- Which Motor Has High Starting Torque and Staring Current DC Motor, Induction Motor or Synchronous Motor?Document26 pagesWhich Motor Has High Starting Torque and Staring Current DC Motor, Induction Motor or Synchronous Motor?NavdeepNo ratings yet
- DC Motor S: Anand 08338958770Document79 pagesDC Motor S: Anand 08338958770Rohit AvasthiNo ratings yet
- TP2-Satya PrakashDocument13 pagesTP2-Satya Prakashm_azhagarNo ratings yet
- Speed Control of DC MotorDocument19 pagesSpeed Control of DC MotorVijaya LakshmiNo ratings yet
- DC Drives - ConstructionDocument10 pagesDC Drives - ConstructionSuyog ShingareNo ratings yet
- Electric DrivesDocument32 pagesElectric DrivessangsangicnuNo ratings yet
- Electric Drives ControlDocument29 pagesElectric Drives ControlNebyou DanielNo ratings yet
- Electric Vehicle 4th ModuleDocument13 pagesElectric Vehicle 4th ModuleAmruth DeshpandeNo ratings yet
- Chapter 1: IntroductionDocument118 pagesChapter 1: Introductionrizwan_adilNo ratings yet
- Modern VVVF DrivesDocument5 pagesModern VVVF DrivesJohn BackmanNo ratings yet
- Unit-II: Robot Drive Systems and End EffectorsDocument81 pagesUnit-II: Robot Drive Systems and End EffectorsSatheesh KumarNo ratings yet
- Unit-II Drive SystemDocument84 pagesUnit-II Drive SystemSatheesh KumarNo ratings yet
- Regenerative Braking of Induction MotorDocument27 pagesRegenerative Braking of Induction MotorcoolkannaNo ratings yet
- Machines AssignmentDocument7 pagesMachines AssignmentCharles MuneneNo ratings yet
- Purpose of Variable Frequency DrivesDocument25 pagesPurpose of Variable Frequency DrivesGaurav MobarNo ratings yet
- Chapter 3 - Actuators-1Document42 pagesChapter 3 - Actuators-1NguyenNo ratings yet
- Em 1 TestingDocument13 pagesEm 1 TestingAravindNo ratings yet
- Technical Seminar On VFDDocument17 pagesTechnical Seminar On VFDRadhika Priyadarshini100% (7)
- Brushed DC Sensorless FeedbackDocument3 pagesBrushed DC Sensorless FeedbackHoon Miew JieNo ratings yet
- Answer QB 2Document22 pagesAnswer QB 2Goud SannyNo ratings yet
- Lecture No 5Document27 pagesLecture No 5Walid salamaNo ratings yet
- DC Motor Speed Control: Bayan University For Science & TechnologyDocument12 pagesDC Motor Speed Control: Bayan University For Science & TechnologyAltayeb AbdulhameedNo ratings yet
- Chapter 4 PDFDocument62 pagesChapter 4 PDFMuhamad AmmarNo ratings yet
- DC MotorDocument8 pagesDC Motorven_avv3382No ratings yet
- Speed Control of MotorDocument5 pagesSpeed Control of MotorPrabuddha ChakrabortyNo ratings yet
- Four Quadrant OperationDocument9 pagesFour Quadrant OperationMOTILAL SUTHAR215291No ratings yet
- Speed Control of DC Motor by Using PWM TechniqueDocument51 pagesSpeed Control of DC Motor by Using PWM TechniqueYuvraj GogoiNo ratings yet
- Servo MotorsDocument3 pagesServo MotorsGrinerd GreatNo ratings yet
- VFDDocument20 pagesVFDHarsh Tiwari100% (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetFrom EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNo ratings yet
- Transmission, Distribution and Protection of Electrical Power Systems Lesson PlanDocument2 pagesTransmission, Distribution and Protection of Electrical Power Systems Lesson PlanBilalNo ratings yet
- DC - Machines and Batteries Lesson PlanDocument3 pagesDC - Machines and Batteries Lesson PlanBilalNo ratings yet
- BRAINS Institute, Peshawar: - : (PhysicsDocument2 pagesBRAINS Institute, Peshawar: - : (PhysicsBilalNo ratings yet
- Basic Electrical Drawing Lesson PlanDocument2 pagesBasic Electrical Drawing Lesson PlanBilalNo ratings yet
- Instrument TransformersDocument35 pagesInstrument TransformersBilalNo ratings yet
- Transformer: By: Engr. M.BilalDocument21 pagesTransformer: By: Engr. M.BilalBilalNo ratings yet
- Stepper Motor - Types, Advantages and ApplicationsDocument2 pagesStepper Motor - Types, Advantages and ApplicationsBilalNo ratings yet
- AutotransformersDocument17 pagesAutotransformersBilalNo ratings yet
- AutotransformersDocument17 pagesAutotransformersBilalNo ratings yet
- PhysicsDocument2 pagesPhysicsBilalNo ratings yet
- Applied Phy Civil Petroleum 1yearDocument1 pageApplied Phy Civil Petroleum 1yearBilalNo ratings yet
- BOS B.Tech Electrical FinalDocument49 pagesBOS B.Tech Electrical FinalBilalNo ratings yet
- Applied Phy ELECTRICAL 2 YearDocument2 pagesApplied Phy ELECTRICAL 2 YearBilalNo ratings yet
- Daily Lesson Plan: Define Transformer As Step Up and Step Down. Explain Principle of TransformerDocument76 pagesDaily Lesson Plan: Define Transformer As Step Up and Step Down. Explain Principle of TransformerBilalNo ratings yet
- Equivalency of Various Subjects DRDocument3 pagesEquivalency of Various Subjects DRBilalNo ratings yet
- Curriculum CertificateDocument17 pagesCurriculum CertificateBilalNo ratings yet
- Ibps Po 2020 Question Paper 77Document32 pagesIbps Po 2020 Question Paper 77BilalNo ratings yet
- Boq ElectricalDocument22 pagesBoq ElectricalMohammed SajjadNo ratings yet
- 3HBS225931 ACS 1000ServiceMaintenanceManualDocument60 pages3HBS225931 ACS 1000ServiceMaintenanceManualcldanghel4648100% (1)
- DD353481Document2 pagesDD353481Hayden LovettNo ratings yet
- Catalogue aisladores-Composite-insulators-Rebosio-02 - 2018 PDFDocument54 pagesCatalogue aisladores-Composite-insulators-Rebosio-02 - 2018 PDFalsanchezacNo ratings yet
- Lower Bom Weight Estimate For Lifting in HelicopterDocument1 pageLower Bom Weight Estimate For Lifting in HelicopterRajan BhandariNo ratings yet
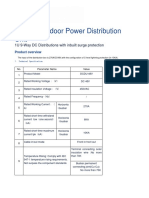
- Air Scale Indoor Power Distribution Unit: 1U 9-Way DC Distributions With Inbuilt Surge ProtectionDocument4 pagesAir Scale Indoor Power Distribution Unit: 1U 9-Way DC Distributions With Inbuilt Surge ProtectionAhmed ZeharaNo ratings yet
- Ferguson IM-pAC E-UKDocument2 pagesFerguson IM-pAC E-UKSuhas KODRENo ratings yet
- M2582, M5081, and M5180 Series Electromechanical and Pneumatic, Fuel Gas Shut Off Valves Installation and Operation InstructionsDocument12 pagesM2582, M5081, and M5180 Series Electromechanical and Pneumatic, Fuel Gas Shut Off Valves Installation and Operation InstructionsFercho MNo ratings yet
- DTC P0A94/553 DC/DC Converter Performance: Circuit DescriptionDocument9 pagesDTC P0A94/553 DC/DC Converter Performance: Circuit Descriptionjermaine tobanNo ratings yet
- Object Detection 219166 Global Line BrochureDocument36 pagesObject Detection 219166 Global Line BrochureBalluff SensorsNo ratings yet
- Name: Designation: Department: Date of Joining:: Hassan Tanveer Trainee Engineer Smart MRT 3 Dec 2020Document4 pagesName: Designation: Department: Date of Joining:: Hassan Tanveer Trainee Engineer Smart MRT 3 Dec 2020HASSAN TANVEERNo ratings yet
- JFV 700Document66 pagesJFV 700Sofiene BayNo ratings yet
- Energy-Efficient Power Supply For Induction Hardening and Heating ProcessesDocument8 pagesEnergy-Efficient Power Supply For Induction Hardening and Heating ProcessesJoel Antonio Lopez LopezNo ratings yet
- Abhishek Electrical Industries Manufacturers, Suppliers, Exporters, Dealers in IndiaDocument2 pagesAbhishek Electrical Industries Manufacturers, Suppliers, Exporters, Dealers in Indiashyam ubaleNo ratings yet
- MJE15034 NPN, MJE15035 PNP Complementary Silicon Plastic Power TransistorsDocument6 pagesMJE15034 NPN, MJE15035 PNP Complementary Silicon Plastic Power TransistorsMehmet ÇatçatNo ratings yet
- What Is Negative Sequence Current and How Does It Affect Generator WorkDocument12 pagesWhat Is Negative Sequence Current and How Does It Affect Generator Workwaleed mohiNo ratings yet
- Electrical Engineering: Catalogue No. 23-CDocument278 pagesElectrical Engineering: Catalogue No. 23-CMuhammadFajarBaskoroNo ratings yet
- MCB Ratings For Led LuminairesDocument10 pagesMCB Ratings For Led LuminairesravNo ratings yet
- Physics A-C 2nd 10Document3 pagesPhysics A-C 2nd 10Debela mendaraNo ratings yet
- Riser Diagram PDFDocument1 pageRiser Diagram PDFChristian FloresNo ratings yet
- Wintop LotusDocument16 pagesWintop LotusGoran StokiNo ratings yet
- PV1800 VHM SERIES (2KW-5.5KW) : High Frequency Off Grid Solar InverterDocument4 pagesPV1800 VHM SERIES (2KW-5.5KW) : High Frequency Off Grid Solar Inverterairton54No ratings yet
- Gas Metal Arc Welding: AnDocument13 pagesGas Metal Arc Welding: Ansamyfr454No ratings yet
- NEW CHAPTER 7 NEC Requirements and Coordination BasicsDocument42 pagesNEW CHAPTER 7 NEC Requirements and Coordination BasicsOsman AhmedNo ratings yet
- Data List Scada KCP 25-05-2016Document2 pagesData List Scada KCP 25-05-2016Bùi Thanh SơnNo ratings yet
- A Self-Study Report On "Servo Motors": Rathan Kumar SM USN:1JS17ME433Document6 pagesA Self-Study Report On "Servo Motors": Rathan Kumar SM USN:1JS17ME433Rathan Kumar SMNo ratings yet
- Assignment 2 2021Document3 pagesAssignment 2 2021shashank saiNo ratings yet
- Equipment DetailsDocument10 pagesEquipment Detailsimranjani.skNo ratings yet
- Exp 1Document5 pagesExp 1Vikas SharmaNo ratings yet
- Estadry D-Type DBDocument12 pagesEstadry D-Type DBcharleselitb92No ratings yet