You might also like
- Mechanical vibrations damped free vibration analysisDocument16 pagesMechanical vibrations damped free vibration analysisFong Wei JunNo ratings yet
- Planned Sequence: Examine Classical WavesDocument17 pagesPlanned Sequence: Examine Classical Waveskasun1237459No ratings yet
- Vibration Modes of Multi-Degree of Freedom SystemsDocument10 pagesVibration Modes of Multi-Degree of Freedom SystemsAryan BhattaraiNo ratings yet
- Vibration Modes of Multi-Degree of Freedom SystemsDocument10 pagesVibration Modes of Multi-Degree of Freedom SystemsAryan BhattaraiNo ratings yet
- 2-DOF System AnalysisDocument41 pages2-DOF System AnalysisManavNo ratings yet
- Simple Harmonic Motion 3Document32 pagesSimple Harmonic Motion 3Ar Ar ViNo ratings yet
- 052 DOFand MdofDocument42 pages052 DOFand MdofAbdelhay ElomariNo ratings yet
- Ch1 Principle of Sound and VibrationDocument11 pagesCh1 Principle of Sound and VibrationTsz Chun YuNo ratings yet
- Lecture 1aDocument19 pagesLecture 1aYusuf GulNo ratings yet
- Lecture 1cDocument15 pagesLecture 1cYusuf GulNo ratings yet
- MP QM - Part 2 - 2021Document36 pagesMP QM - Part 2 - 2021sama akramNo ratings yet
- Inverse KinematicsDocument43 pagesInverse KinematicsHung Nguyen-CongNo ratings yet
- SDOF Free Vibration Response CharacteristicsDocument12 pagesSDOF Free Vibration Response CharacteristicsCorinne Wesnee YuNo ratings yet
- M2 L Vibration Acceleration MeasurementDocument22 pagesM2 L Vibration Acceleration MeasurementRekha Naveen ShettigarNo ratings yet
- Stability of Delays SystemsDocument41 pagesStability of Delays SystemsVikranth VeeraNo ratings yet
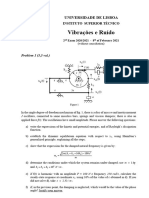
- Exam Vibrations and NoiseDocument6 pagesExam Vibrations and NoisejoaoftabreuNo ratings yet
- Mdof23-L-V16-Red 2Document113 pagesMdof23-L-V16-Red 2nfaayedNo ratings yet
- Observers and Kalman Filters: CS 393R: Autonomous RobotsDocument37 pagesObservers and Kalman Filters: CS 393R: Autonomous RobotsRaju GummaNo ratings yet
- Two-Degrees-of-Freedom Systems: ModesDocument8 pagesTwo-Degrees-of-Freedom Systems: ModesHayderyNo ratings yet
- EAT216 - Vibration 20191008Document47 pagesEAT216 - Vibration 20191008ibrahim ibrahimNo ratings yet
- Exam Vibrations and NoiseDocument6 pagesExam Vibrations and NoisejoaoftabreuNo ratings yet
- Osilasi HarmonisDocument62 pagesOsilasi HarmonisYudhistira YossaNo ratings yet
- The Inelastic Maxwell Model: Eli Ben-Naim Theory Division, Los Alamos National LabDocument30 pagesThe Inelastic Maxwell Model: Eli Ben-Naim Theory Division, Los Alamos National Labsan97lahariNo ratings yet
- Mean and Autocorrelation FunctionsDocument5 pagesMean and Autocorrelation FunctionsgopNo ratings yet
- Lecture 2eDocument7 pagesLecture 2eYusuf GulNo ratings yet
- Chapter 4 Multiple-Degree-of-Freedom (MDOF) Systems ExamplesDocument17 pagesChapter 4 Multiple-Degree-of-Freedom (MDOF) Systems ExamplesprashanthNo ratings yet
- BMM3553 Mechanical Vibrations: Chapter 3: Damped Vibration of Single Degree of Freedom System (Part 1)Document37 pagesBMM3553 Mechanical Vibrations: Chapter 3: Damped Vibration of Single Degree of Freedom System (Part 1)Alooy MohamedNo ratings yet
- SF2521NPDE hmwk1-2Document5 pagesSF2521NPDE hmwk1-2BlooD LOVERNo ratings yet
- S To Chas Tic ProcessesDocument16 pagesS To Chas Tic ProcessesSeham RaheelNo ratings yet
- Problem39 62Document2 pagesProblem39 62IENCSNo ratings yet
- Formula Sheet For EE406: N N N N NDocument7 pagesFormula Sheet For EE406: N N N N NCFANo ratings yet
- Lecture2 Ent281 Chapter 1 (Part2)Document40 pagesLecture2 Ent281 Chapter 1 (Part2)YipNo ratings yet
- Lecture 6 - Spectrum Estimation PDFDocument47 pagesLecture 6 - Spectrum Estimation PDFMahy Magdy0% (1)
- Lec. 3Document50 pagesLec. 3mustafa alasadyNo ratings yet
- Department of Ece: Agnel Technical Educational Complex Assagao, Bardez-Goa. 403 507Document5 pagesDepartment of Ece: Agnel Technical Educational Complex Assagao, Bardez-Goa. 403 507Vinay RaiNo ratings yet
- PDE Notes2Document50 pagesPDE Notes2MaheshNo ratings yet
- DYNAMIC RESPONSEDocument12 pagesDYNAMIC RESPONSECH20B020 SHUBHAM BAPU SHELKENo ratings yet
- Free vibration of SDOF systemsDocument107 pagesFree vibration of SDOF systemssenthilcae100% (1)
- Advanced Quantum Mechanics, Fall 2017 Assignment 2 (Path Integrals in Quantum Mechanics)Document3 pagesAdvanced Quantum Mechanics, Fall 2017 Assignment 2 (Path Integrals in Quantum Mechanics)Anonymous tjckgoWNeNo ratings yet
- Tutorial QuestionsDocument3 pagesTutorial QuestionsAbiola OgundejiNo ratings yet
- Exam 1Document2 pagesExam 1lookyoursoulNo ratings yet
- Exam Vibrations and NoiseDocument5 pagesExam Vibrations and NoisejoaoftabreuNo ratings yet
- R Rkfixed y 0 Tlength NPT D : Ky Cy M 1 KX DT DX C M 1 DT X DDocument2 pagesR Rkfixed y 0 Tlength NPT D : Ky Cy M 1 KX DT DX C M 1 DT X DHeidi WongNo ratings yet
- Fourier Series & Its ApplicationsDocument32 pagesFourier Series & Its ApplicationsNikunj JhaNo ratings yet
- Free Vibration of Single Degree of Freedom (SDOF)Document107 pagesFree Vibration of Single Degree of Freedom (SDOF)Mahesh LohanoNo ratings yet
- 2.019 Design of Ocean Systems Drift and Slowly-Varying Loads and Motions (II) March 14, 2011Document14 pages2.019 Design of Ocean Systems Drift and Slowly-Varying Loads and Motions (II) March 14, 20118297859765No ratings yet
- Simple Harmonic Motion: 8.01 Week 12D1Document23 pagesSimple Harmonic Motion: 8.01 Week 12D1Deepak AwasthiNo ratings yet
- Mech Vibes HW Set Solution 3Document9 pagesMech Vibes HW Set Solution 3Ryan HetzNo ratings yet
- FEA Interview Questions Module 1Document22 pagesFEA Interview Questions Module 1Namit MishraNo ratings yet
- Lecture 1eDocument10 pagesLecture 1eYusuf GulNo ratings yet
- Semi-Orthogonal Wavelets of Space and Fast Wavelet AlgorithmsDocument6 pagesSemi-Orthogonal Wavelets of Space and Fast Wavelet AlgorithmsjuanNo ratings yet
- Fundamentals of Dynamics of MDOF SystemsDocument28 pagesFundamentals of Dynamics of MDOF SystemsravikumarrampurNo ratings yet
- Fourier Series An IntroductionDocument18 pagesFourier Series An IntroductionRohit KalsiNo ratings yet
- Quant Mech Curs 2018 C8-RDocument32 pagesQuant Mech Curs 2018 C8-RsevestreanalinNo ratings yet
- Things To Learn Today: 1. Equivalent Spring Stiffness 2. A PendulumDocument29 pagesThings To Learn Today: 1. Equivalent Spring Stiffness 2. A PendulumSayantan GhoshNo ratings yet
- Discrete Cosin TransformDocument9 pagesDiscrete Cosin TransformThelinhNo ratings yet
- Signal OperationsDocument38 pagesSignal OperationsGulzar AhamdNo ratings yet
- Summary of Last Lecture: Classical Mechanics & Properties of GasesDocument7 pagesSummary of Last Lecture: Classical Mechanics & Properties of Gasesroxy8marie8chanNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- 2DOF TORSIONAL SYSTEM NATURAL FREQUENCIESDocument12 pages2DOF TORSIONAL SYSTEM NATURAL FREQUENCIESFong Wei JunNo ratings yet
- Lecture 1Document41 pagesLecture 1Fong Wei JunNo ratings yet
- Lecture 6Document9 pagesLecture 6Fong Wei JunNo ratings yet
- Lecture 9Document6 pagesLecture 9Fong Wei JunNo ratings yet
- IntroDocument5 pagesIntroFong Wei JunNo ratings yet
- Lecture 2Document26 pagesLecture 2Fong Wei JunNo ratings yet
- Vibration of Single Degree SystemsDocument15 pagesVibration of Single Degree SystemsFong Wei JunNo ratings yet
- Easy to understand instructions for a Citizen watchDocument107 pagesEasy to understand instructions for a Citizen watchFong Wei JunNo ratings yet
- Angpaw MariDocument1 pageAngpaw MariFong Wei JunNo ratings yet
- Angpaw MariDocument10 pagesAngpaw MariFong Wei JunNo ratings yet
- Altman Z-ScoreDocument3 pagesAltman Z-ScoreFong Wei JunNo ratings yet
- 177 211110 1659555955 Paper 1 06112021 Pam Northern Chapter Webinar ms1184pptxDocument65 pages177 211110 1659555955 Paper 1 06112021 Pam Northern Chapter Webinar ms1184pptxFong Wei JunNo ratings yet
- Engineer TestDocument1 pageEngineer TestFong Wei JunNo ratings yet
- ACMV SwitchDocument2 pagesACMV SwitchFong Wei JunNo ratings yet
- Dimension of Center of Blowdown Bit To CDocument1 pageDimension of Center of Blowdown Bit To CFong Wei JunNo ratings yet
- Inspection Name & Inspectr Name Malaysia Idd Final InspectionDocument9 pagesInspection Name & Inspectr Name Malaysia Idd Final InspectionFong Wei JunNo ratings yet
- DIFFUSERDocument1 pageDIFFUSERFong Wei JunNo ratings yet
- TC in Progress. PIC Contact 0179015986Document1 pageTC in Progress. PIC Contact 0179015986Fong Wei JunNo ratings yet
- StockDocument1 pageStockFong Wei JunNo ratings yet
- Door GrilleDocument1 pageDoor GrilleFong Wei JunNo ratings yet
- TC in Progress. PIC Contact 0179015986Document1 pageTC in Progress. PIC Contact 0179015986Fong Wei JunNo ratings yet
- DIFFUSERDocument1 pageDIFFUSERFong Wei JunNo ratings yet
- 师奶股市Document4 pages师奶股市Fong Wei JunNo ratings yet
- CDADocument2 pagesCDAFong Wei JunNo ratings yet
- Namewee Free TicketDocument2 pagesNamewee Free TicketFong Wei JunNo ratings yet
- CDADocument2 pagesCDAFong Wei JunNo ratings yet
- Autocad CommandDocument1 pageAutocad CommandFong Wei JunNo ratings yet
- TT PDocument3 pagesTT PFong Wei JunNo ratings yet
- Latest Information Technology Trends 2023Document5 pagesLatest Information Technology Trends 2023Salveigh C. TacleonNo ratings yet
- Applsci 13 13339Document25 pagesApplsci 13 13339ambroseoryem1No ratings yet
- The 10 Most Inspiring Quotes of Charles F HaanelDocument21 pagesThe 10 Most Inspiring Quotes of Charles F HaanelKallisti Publishing Inc - "The Books You Need to Succeed"100% (2)
- Arnica The Miracle Remedy - Case RecordsDocument4 pagesArnica The Miracle Remedy - Case Recordskaravi schiniasNo ratings yet
- Reference Interval For CeruloplasminDocument3 pagesReference Interval For CeruloplasminGawri AbeyNo ratings yet
- JSMSC - TDv3 6 20Document251 pagesJSMSC - TDv3 6 20Jason20170% (1)
- Problem solving and decision making in nutrition postgraduate studiesDocument55 pagesProblem solving and decision making in nutrition postgraduate studiesteklayNo ratings yet
- 2020-Effect of Biopolymers On Permeability of Sand-Bentonite MixturesDocument10 pages2020-Effect of Biopolymers On Permeability of Sand-Bentonite MixturesSaswati DattaNo ratings yet
- Day3 PESTLE AnalysisDocument13 pagesDay3 PESTLE AnalysisAmit AgrawalNo ratings yet
- A Grammar of Awa Pit (Cuaiquer) : An Indigenous Language of South-Western ColombiaDocument422 pagesA Grammar of Awa Pit (Cuaiquer) : An Indigenous Language of South-Western ColombiaJuan Felipe Hoyos García100% (1)
- Beef & Dairy 2016Document36 pagesBeef & Dairy 2016The Standard NewspaperNo ratings yet
- Epoxy HRDocument5 pagesEpoxy HRMuthuKumarNo ratings yet
- Detailed Lesson Plan in TechnologyDocument11 pagesDetailed Lesson Plan in TechnologyReshiela OrtizNo ratings yet
- Ndeb Bned Reference Texts 2019 PDFDocument11 pagesNdeb Bned Reference Texts 2019 PDFnavroop bajwaNo ratings yet
- 2.e-Learning Chapter 910Document23 pages2.e-Learning Chapter 910ethandanfordNo ratings yet
- 2746 PakMaster 75XL Plus (O)Document48 pages2746 PakMaster 75XL Plus (O)Samuel ManducaNo ratings yet
- Sci10-Q4-M2_104804Document15 pagesSci10-Q4-M2_104804alindongaprilmaeNo ratings yet
- A APJ Abdul Kalam Technological University First Semester M. Tech. Degree Examination December 2016 Ernakulum II ClusterDocument2 pagesA APJ Abdul Kalam Technological University First Semester M. Tech. Degree Examination December 2016 Ernakulum II ClusterAshwin JoseNo ratings yet
- 41-How To Calculate Air Temp in Unconditioned SpacesDocument3 pages41-How To Calculate Air Temp in Unconditioned Spacesalmig200No ratings yet
- ASTM D5895 - 2020 Tiempo SecadoDocument4 pagesASTM D5895 - 2020 Tiempo SecadoPablo OrtegaNo ratings yet
- HE HOUSEKEEPING GR11 Q1 MODULE-6-for-teacherDocument25 pagesHE HOUSEKEEPING GR11 Q1 MODULE-6-for-teacherMikaela YtacNo ratings yet
- Power Fresh 16Document3 pagesPower Fresh 16M. Ardi PrediyanaNo ratings yet
- Course 4Document3 pagesCourse 4Ibrahim SalahudinNo ratings yet
- LEEA-030.2c2 Certificate of Thorough Examination (Multiple Items) (Overseas) (Dev)Document1 pageLEEA-030.2c2 Certificate of Thorough Examination (Multiple Items) (Overseas) (Dev)GaniyuNo ratings yet
- Ic T7HDocument36 pagesIc T7HCarlos GaiarinNo ratings yet
- Viennot - 1979 - Spontaneous Reasoning in Elementary DynamicsDocument18 pagesViennot - 1979 - Spontaneous Reasoning in Elementary Dynamicsjumonteiro2000No ratings yet
- Grammar Pages 109-112 2 PDFDocument4 pagesGrammar Pages 109-112 2 PDFSteve SernaNo ratings yet
- Performance Evaluation of Root Crop HarvestersDocument15 pagesPerformance Evaluation of Root Crop HarvestersIJERDNo ratings yet
- Chapter 08-Borrowing Costs-Tutorial AnswersDocument4 pagesChapter 08-Borrowing Costs-Tutorial AnswersMayomi JayasooriyaNo ratings yet
- Service Manual for Daewoo Mini Component Sound SystemsDocument46 pagesService Manual for Daewoo Mini Component Sound SystemsDaifred GutiérrezNo ratings yet