You might also like
- Plastic ... Chap..5Document61 pagesPlastic ... Chap..5ABAMELANo ratings yet
- Design Chart No - 1 PDFDocument1 pageDesign Chart No - 1 PDFhailishNo ratings yet
- General Design Chart No. 1: (1) If Compression Reinforcement Is Not RequiredDocument1 pageGeneral Design Chart No. 1: (1) If Compression Reinforcement Is Not RequiredhailishNo ratings yet
- BT02Document10 pagesBT02Trang Phạm ThịNo ratings yet
- Conceptual Design: Figure 3: Design Procedure For Micro Aerial VehicleDocument14 pagesConceptual Design: Figure 3: Design Procedure For Micro Aerial Vehiclepramo_dassNo ratings yet
- Pile Capacity by JICADocument5 pagesPile Capacity by JICAEmdadul HuqNo ratings yet
- Column Design ChartDocument5 pagesColumn Design ChartGabriel100% (2)
- Frame UnitDocument27 pagesFrame UnitVN MÁY TỰ ĐỘNGNo ratings yet
- 15 FIR Filter Design by WindowingDocument9 pages15 FIR Filter Design by Windowingnitesh mudgalNo ratings yet
- P Culvert Plan - ModelDocument1 pageP Culvert Plan - ModelAlie JallohNo ratings yet
- Vježba 1: Osnove RELEX-a I Određivanje Pouzdanosti SustavaDocument17 pagesVježba 1: Osnove RELEX-a I Određivanje Pouzdanosti SustavaMajaNo ratings yet
- 2nd-Order System: Lab-808: Power Electronic Systems & Chips Lab., NCTU, TaiwanDocument12 pages2nd-Order System: Lab-808: Power Electronic Systems & Chips Lab., NCTU, Taiwanhord72No ratings yet
- Operations Management Session 9: Facility Layout - Assembly LineDocument22 pagesOperations Management Session 9: Facility Layout - Assembly Linekshitiz singhNo ratings yet
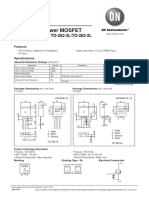
- N-Channel Power MOSFET: 60V, 100A, 4.7m, TO-262-3L/TO-263-2LDocument9 pagesN-Channel Power MOSFET: 60V, 100A, 4.7m, TO-262-3L/TO-263-2LLuis KissNo ratings yet
- RRRRDocument2 pagesRRRRAek JanNo ratings yet
- Polycab Solar CableDocument2 pagesPolycab Solar CableRam KumarNo ratings yet
- E E E E: Chamfer 0.3 X 45° Any Dimond Knurling Knurling Dia 7.2 Section E-EDocument1 pageE E E E: Chamfer 0.3 X 45° Any Dimond Knurling Knurling Dia 7.2 Section E-EAyush NarangNo ratings yet
- Example 10.1: A B A BDocument1 pageExample 10.1: A B A BEmerson Chen FuNo ratings yet
- 2X2.5 Cable PDFDocument1 page2X2.5 Cable PDFNguyen Thai ThuyNo ratings yet
- Oceanography and Marine Biology RepairedDocument542 pagesOceanography and Marine Biology Repairedajik indiantoNo ratings yet
- Prediction of Aerodynamiccharacteristics For Slender Bluff Bodies With Different Nose Cone ShapesDocument10 pagesPrediction of Aerodynamiccharacteristics For Slender Bluff Bodies With Different Nose Cone ShapesTJPRC PublicationsNo ratings yet
- Electric Chiller Replacement 8000 RT Step Down Building: Project Name Design by Building Name Floor/ LevelDocument2 pagesElectric Chiller Replacement 8000 RT Step Down Building: Project Name Design by Building Name Floor/ LevelAek JanNo ratings yet
- Floefd Validation Examples: Your Initials, Presentation Title, Month YearDocument21 pagesFloefd Validation Examples: Your Initials, Presentation Title, Month YearVictor HuertaNo ratings yet
- Standards Example EDocument22 pagesStandards Example EHeverNo ratings yet
- Geoffrey M. Rowe, Gayle N. King and Mike AndersonDocument35 pagesGeoffrey M. Rowe, Gayle N. King and Mike AndersonKiplgat ChelelgoNo ratings yet
- IC Report1 Damp 1 PDFDocument26 pagesIC Report1 Damp 1 PDFLautaroNo ratings yet
- ET2 N16 (Relay)Document4 pagesET2 N16 (Relay)David MendezNo ratings yet
- RRRR 1Document2 pagesRRRR 1Aek JanNo ratings yet
- 3 2Document2 pages3 2Mustafa Al-GhoulNo ratings yet
- Bolts - Flange, Hexagon Head Type 2: Nissan Engineering StandardDocument10 pagesBolts - Flange, Hexagon Head Type 2: Nissan Engineering StandardprasannaNo ratings yet
- 2X10X5.5 MNBDocument680 pages2X10X5.5 MNBRudra SharmaNo ratings yet
- EMC Components: ZJYS Series ZJYS51, ZJYS81 Types Common Mode Choke Coils For Signal Line SMDDocument4 pagesEMC Components: ZJYS Series ZJYS51, ZJYS81 Types Common Mode Choke Coils For Signal Line SMDAngel VelasquezNo ratings yet
- ST 934 20200521Document2 pagesST 934 20200521Creo ParametricNo ratings yet
- Box Culvert 5cells - 4m X 4mDocument40 pagesBox Culvert 5cells - 4m X 4mshashiNo ratings yet
- KBU4,6,8/RS6 SERIES: Single-Phase Silicon Bridge Reverse Voltage - Forward CurrentDocument3 pagesKBU4,6,8/RS6 SERIES: Single-Phase Silicon Bridge Reverse Voltage - Forward CurrentНиколайNo ratings yet
- Controller Design Based On Transient Response CriteriaDocument45 pagesController Design Based On Transient Response CriteriaDEVI RAJENDRANNo ratings yet
- 2.BP1 T+HDocument31 pages2.BP1 T+Hkheang amgNo ratings yet
- مقاومة ١Document7 pagesمقاومة ١ahmad243809No ratings yet
- Hes B117-03 Flange NutsDocument5 pagesHes B117-03 Flange NutsPreetam KumarNo ratings yet
- CPT 205488 Rep01Document2 pagesCPT 205488 Rep01rupalss1235No ratings yet
- Scion Instruments Refinery Gas Analyzer Saranalab Mandiri AnalitikaDocument28 pagesScion Instruments Refinery Gas Analyzer Saranalab Mandiri AnalitikaAbdurahmanAlkaffNo ratings yet
- American University of Sharjah: NGN 509 - Computational Methods Professor Nai-Shyong Yeh Assignment #2Document5 pagesAmerican University of Sharjah: NGN 509 - Computational Methods Professor Nai-Shyong Yeh Assignment #2Mohammed AlmoriseyNo ratings yet
- Module 43 Solution Randomly Varying Stresses and Miner S RuleDocument3 pagesModule 43 Solution Randomly Varying Stresses and Miner S RuleWolf Lord100% (1)
- DIN DIN Groove Profile Groove ProfileDocument1 pageDIN DIN Groove Profile Groove ProfileDiego RodriguezNo ratings yet
- Project Name: Earned Value Analysis ReportDocument3 pagesProject Name: Earned Value Analysis ReportEyutt HghghNo ratings yet
- Project Name: Earned Value Analysis ReportDocument3 pagesProject Name: Earned Value Analysis ReportSattu RjNo ratings yet
- Field CBR Test: Penetration (MM)Document1 pageField CBR Test: Penetration (MM)Anduel SelamajNo ratings yet
- Anchor YS.Document2 pagesAnchor YS.RizkiNo ratings yet
- Desen Arbore de Intrare Reductor PDFDocument1 pageDesen Arbore de Intrare Reductor PDFDan07No ratings yet
- AU-60 Emergency Stop Modules: How To Order: Loading InformationDocument5 pagesAU-60 Emergency Stop Modules: How To Order: Loading InformationBe HappyNo ratings yet
- C 05 SupplementDocument13 pagesC 05 SupplementVivekananda NandamNo ratings yet
- Huffman Trees and Codes: Greedy TechniqueDocument6 pagesHuffman Trees and Codes: Greedy TechniqueAkhdan MumtazNo ratings yet
- Curve Ncy Clop 09Document30 pagesCurve Ncy Clop 09smithap_ullalNo ratings yet
- Raft Foundation Rigid Analysis - by WANDocument3 pagesRaft Foundation Rigid Analysis - by WANKAI CHUAN CHUNo ratings yet
- Math Practice Simplified: Decimals & Percents (Book H): Practicing the Concepts of Decimals and PercentagesFrom EverandMath Practice Simplified: Decimals & Percents (Book H): Practicing the Concepts of Decimals and PercentagesRating: 5 out of 5 stars5/5 (3)
- Plastic Injection Mold Design for Toolmakers - Volume II: Plastic Injection Mold Design for Toolmakers, #2From EverandPlastic Injection Mold Design for Toolmakers - Volume II: Plastic Injection Mold Design for Toolmakers, #2No ratings yet
- If You Spot These 14 Signs in Your FriendDocument8 pagesIf You Spot These 14 Signs in Your FriendABAMELANo ratings yet
- Are They Really Your FriendDocument6 pagesAre They Really Your FriendABAMELANo ratings yet
- Ceng3143 Fge-III Ext Chapter5Document122 pagesCeng3143 Fge-III Ext Chapter5ABAMELANo ratings yet
- 24 Signs To Tell Fake Friends From Real FriendsDocument8 pages24 Signs To Tell Fake Friends From Real FriendsABAMELANo ratings yet
- DocumentDocument5 pagesDocumentABAMELANo ratings yet
- Fake PeopleDocument4 pagesFake PeopleABAMELANo ratings yet
- How To Spot A Fake FriendDocument9 pagesHow To Spot A Fake FriendABAMELANo ratings yet
- 3 Matrics Analysis MethodDocument30 pages3 Matrics Analysis MethodABAMELANo ratings yet
- Fake 5Document4 pagesFake 5ABAMELANo ratings yet
- Telltale Signs of Fake Friends and How To Avoid ThemDocument3 pagesTelltale Signs of Fake Friends and How To Avoid ThemABAMELANo ratings yet
- Feke 2Document6 pagesFeke 2ABAMELANo ratings yet
- Final Edited Surface Road-From TeshomeDocument30 pagesFinal Edited Surface Road-From TeshomeABAMELANo ratings yet
- Weir 29Document49 pagesWeir 29ABAMELANo ratings yet
- HR - Outlet Control Design (Commented)Document40 pagesHR - Outlet Control Design (Commented)ABAMELANo ratings yet
- Staircase Design (With Out Cantilever)Document3 pagesStaircase Design (With Out Cantilever)ABAMELANo ratings yet
- Slab Design2Document9 pagesSlab Design2ABAMELANo ratings yet
- Spreadsheet Issue Sheet 1-Jul-2014Document9 pagesSpreadsheet Issue Sheet 1-Jul-2014ABAMELANo ratings yet
- CD21 CalDocument15 pagesCD21 CalABAMELANo ratings yet
- Design Box Culvert For Shawee River RoadDocument14 pagesDesign Box Culvert For Shawee River RoadABAMELANo ratings yet
- Culvert Structur Hydrolice CalculationDocument2 pagesCulvert Structur Hydrolice CalculationABAMELANo ratings yet
- CD Crossing Mc-KimDocument5 pagesCD Crossing Mc-KimABAMELANo ratings yet
- Abera HR Inlet - Control Design (Commented)Document38 pagesAbera HR Inlet - Control Design (Commented)ABAMELANo ratings yet
- 0+30.4 To 1000Document6 pages0+30.4 To 1000ABAMELANo ratings yet
- 05-Series 5000 Base, Sub Base and Gravel Wearing Course NewDocument59 pages05-Series 5000 Base, Sub Base and Gravel Wearing Course NewABAMELANo ratings yet
- BoX Culvert 29Document14 pagesBoX Culvert 29ABAMELANo ratings yet
- Feeder Canal Lining 29Document12 pagesFeeder Canal Lining 29ABAMELANo ratings yet
- Shawe Flume 29Document18 pagesShawe Flume 29ABAMELANo ratings yet
- WFC IPC NO.29 - Amendement 2 - 80Document27 pagesWFC IPC NO.29 - Amendement 2 - 80ABAMELANo ratings yet
- (Guedes - Soares-Joško - Parunov) - Advanced Ship Design For Pollution Prevention-2010Document303 pages(Guedes - Soares-Joško - Parunov) - Advanced Ship Design For Pollution Prevention-2010Wee WeeNo ratings yet
- Spatial Disorientation in AviationDocument12 pagesSpatial Disorientation in AviationT-CAS0% (1)
- Chapter 2 Lecture Nuclear Stability and ModelsDocument24 pagesChapter 2 Lecture Nuclear Stability and ModelsSepamoNo ratings yet
- E Me 4076 Mechanical Vibrations T 120032004Document4 pagesE Me 4076 Mechanical Vibrations T 120032004鲁肃津No ratings yet
- ANSYS 10.0 Workbench Tutorial - Description of TutorialsDocument7 pagesANSYS 10.0 Workbench Tutorial - Description of TutorialssangeethsreeniNo ratings yet
- Autonomous VehiclesDocument20 pagesAutonomous VehiclesKiran KumarNo ratings yet
- (Applied Mathematical Sciences 35) Jack Carr (Auth.) - Applications of Centre Manifold Theory-Springer-Verlag New York (1981)Document156 pages(Applied Mathematical Sciences 35) Jack Carr (Auth.) - Applications of Centre Manifold Theory-Springer-Verlag New York (1981)sridevi10masNo ratings yet
- Is-5382-1998 Specification-for-Rubber-Sealing-Rings-for-Gas-Mains-Water-Mains-and-Sewage PDFDocument23 pagesIs-5382-1998 Specification-for-Rubber-Sealing-Rings-for-Gas-Mains-Water-Mains-and-Sewage PDFDeven Patle0% (1)
- Financial Mathematics Course FIN 118 Unit Course 0 Number Unit Introduction To The Course Unit SubjectDocument23 pagesFinancial Mathematics Course FIN 118 Unit Course 0 Number Unit Introduction To The Course Unit Subjectayadi_ezer6795No ratings yet
- Year 6 - EclipsesDocument7 pagesYear 6 - EclipsesHani BakarNo ratings yet
- Heat Transfer PITDocument15 pagesHeat Transfer PITMondaya, Jake Armond D.No ratings yet
- Lecture 24 - Prestressed ConcreteDocument12 pagesLecture 24 - Prestressed ConcretejeovanNo ratings yet
- Mitsubishi SF JFDocument12 pagesMitsubishi SF JFLucky AndoyoNo ratings yet
- What Is Multivariable Calculus (MVC) ?Document6 pagesWhat Is Multivariable Calculus (MVC) ?Muhammad ArshadNo ratings yet
- Design and Calculation AgitationDocument18 pagesDesign and Calculation AgitationDavid Lambert67% (3)
- Ation Words That Best Completes The SentenceDocument8 pagesAtion Words That Best Completes The SentenceMG's Fhya Part II0% (1)
- AcousticsDocument7 pagesAcousticscancan25No ratings yet
- c1 - Intermolecular ForcesDocument69 pagesc1 - Intermolecular ForcesNabilah MustafaNo ratings yet
- Gravitator: "How I Control Gravitation" British Patent # 300,311Document17 pagesGravitator: "How I Control Gravitation" British Patent # 300,311Brian BennNo ratings yet
- Ortho TRX LineDocument16 pagesOrtho TRX LineAliOucharNo ratings yet
- SIFCONDocument26 pagesSIFCONKavitha PNo ratings yet
- Crystallization: A. BackgroundDocument8 pagesCrystallization: A. Backgroundchamp delacruzNo ratings yet
- C 14Document26 pagesC 14pfylNo ratings yet
- Energy TypesDocument3 pagesEnergy TypesSuki TsangNo ratings yet
- ANSI HI-12.1-12.6 Slurry PumpsDocument5 pagesANSI HI-12.1-12.6 Slurry PumpsPatricia J Ángeles100% (1)
- H Guru Instrument North India Private LimitedDocument6 pagesH Guru Instrument North India Private LimitedneenuNo ratings yet
- Aestiva MRIDocument18 pagesAestiva MRImalamandeaceroNo ratings yet
- Shear Wave Velocity: Comparison Between Centrifuge and Triaxial Based MeasurementsDocument6 pagesShear Wave Velocity: Comparison Between Centrifuge and Triaxial Based MeasurementsLuciano JuniorNo ratings yet
- Winnowing PDFDocument1 pageWinnowing PDFAzeez BashaNo ratings yet
- Duraturf Product Group Harver Magnetic Induction: Harver Induction InfoDocument8 pagesDuraturf Product Group Harver Magnetic Induction: Harver Induction Infoadrianajones4No ratings yet