You might also like
- AI - Unit 2Document46 pagesAI - Unit 2Aryan kapoleNo ratings yet
- Back Propogation AlgorithmDocument17 pagesBack Propogation AlgorithmABCNo ratings yet
- Brain Controlled Car For DisabledDocument44 pagesBrain Controlled Car For DisabledCharcha BhansaliNo ratings yet
- NNDLDocument96 pagesNNDLYogesh KrishnaNo ratings yet
- OOP MaterialDocument19 pagesOOP MaterialTybca077Goyani VaidehiNo ratings yet
- Finite MathematicsDocument94 pagesFinite MathematicsDiana LeònNo ratings yet
- Unit I MACHINE LEARNINGDocument87 pagesUnit I MACHINE LEARNINGapurvaNo ratings yet
- Question Bank Module-1: Department of Computer Applications 18mca53 - Machine LearningDocument7 pagesQuestion Bank Module-1: Department of Computer Applications 18mca53 - Machine LearningShiva ShankaraNo ratings yet
- CS3351 DPCO Syllabus 2021R II Year AIDSDocument2 pagesCS3351 DPCO Syllabus 2021R II Year AIDSRaja SekarNo ratings yet
- 05-Adaptive Resonance TheoryDocument0 pages05-Adaptive Resonance TheoryCHANDRA BHUSHANNo ratings yet
- BackpropagationDocument7 pagesBackpropagationShruti JamsandekarNo ratings yet
- Back Propagation Back Propagation Network Network Network NetworkDocument29 pagesBack Propagation Back Propagation Network Network Network NetworkalvinvergheseNo ratings yet
- Unit 1-5 CS8079 HCI QBank Panimalar College PDFDocument49 pagesUnit 1-5 CS8079 HCI QBank Panimalar College PDFHafiz RahmanNo ratings yet
- A Distinguish Between Linearly Separable and Linearly Inseparable Problems With ExampleDocument3 pagesA Distinguish Between Linearly Separable and Linearly Inseparable Problems With ExampleVIKRAM KUMAR100% (1)
- Unit 4 - Machine Learning - WWW - Rgpvnotes.inDocument16 pagesUnit 4 - Machine Learning - WWW - Rgpvnotes.inROHIT MISHRA0% (1)
- ML Notes TBDocument5 pagesML Notes TBrayudu shivaNo ratings yet
- Plant Leaf Disease Detection and ClassificationDocument53 pagesPlant Leaf Disease Detection and Classificationshital shermaleNo ratings yet
- Quantum Circuit: PreliminariesDocument16 pagesQuantum Circuit: PreliminariesMELINDA BR GINTINGNo ratings yet
- ML Unit 1-NotesDocument21 pagesML Unit 1-NotesAbhi ReddyNo ratings yet
- Chapter 7 - Neural-NetworksDocument60 pagesChapter 7 - Neural-NetworksBulmi Hilme100% (1)
- Machine Learning Notes cs229Document217 pagesMachine Learning Notes cs229solomon sudheerNo ratings yet
- Unit 2aDocument31 pagesUnit 2aAkshaya GopalakrishnanNo ratings yet
- SCSA3015 Deep Learning Unit 2 PDFDocument32 pagesSCSA3015 Deep Learning Unit 2 PDFpooja vikirthiniNo ratings yet
- Machine Learning NNDocument16 pagesMachine Learning NNMegha100% (1)
- DSP Lab Rubric PDFDocument1 pageDSP Lab Rubric PDFPaola Marie CabariosNo ratings yet
- Uninformed and Informed Search AlgorithmsDocument33 pagesUninformed and Informed Search AlgorithmsDafniNo ratings yet
- Unit 1-5 CS8079 HCI QBank Panimalar College PDFDocument49 pagesUnit 1-5 CS8079 HCI QBank Panimalar College PDFSilent BoyNo ratings yet
- AIML Unit 2 NotesDocument49 pagesAIML Unit 2 NotesHarshithaNo ratings yet
- Ai 1ST Unit Short& Long AnswersDocument85 pagesAi 1ST Unit Short& Long AnswersGanesh ChandraNo ratings yet
- Pinns - 1dheatequationexample: 1 OverviewDocument30 pagesPinns - 1dheatequationexample: 1 OverviewHari Madhavan Krishna KumarNo ratings yet
- AML 04 BackpropagationDocument26 pagesAML 04 BackpropagationVaibhavNo ratings yet
- Brochure of ATAL Sponsored Workshop On Robotics 3rd-7th Feb 2020Document2 pagesBrochure of ATAL Sponsored Workshop On Robotics 3rd-7th Feb 2020kumareshNo ratings yet
- Artificial Intelligent - Questn Bank PrintDocument27 pagesArtificial Intelligent - Questn Bank PrintPuspha Vasanth RNo ratings yet
- Lab 3 AiDocument5 pagesLab 3 AiAtif JalalNo ratings yet
- Machine Learning Unit 3Document40 pagesMachine Learning Unit 3read4freeNo ratings yet
- ProjectDocument20 pagesProjectHIMANSHU GOELNo ratings yet
- Lab Manual: IT-602 Wireless & Mobile ComputingDocument19 pagesLab Manual: IT-602 Wireless & Mobile ComputingSanjay kurmiNo ratings yet
- Inter Process CommunicationDocument8 pagesInter Process CommunicationAditya KumarNo ratings yet
- COS6077B Cloud ComputingDocument53 pagesCOS6077B Cloud ComputingmahendrasuryavanshiNo ratings yet
- Lab Manual: CSE 421: Artificial Intelligent and Deep LearningDocument28 pagesLab Manual: CSE 421: Artificial Intelligent and Deep LearningSuneela MatheNo ratings yet
- Sham Daa MCQDocument2 pagesSham Daa MCQsanjana jadhavNo ratings yet
- Autoencoders - Buffalo UniversityDocument36 pagesAutoencoders - Buffalo UniversitynitinNo ratings yet
- What Are The Physical Addresses For The Following Logical AddressesDocument5 pagesWhat Are The Physical Addresses For The Following Logical AddressesObelisk4100% (2)
- Lecture Notes 5Document3 pagesLecture Notes 5fgsfgsNo ratings yet
- Module 1Document91 pagesModule 1Nikitha NarendraNo ratings yet
- State Space Search Lecture # 2Document34 pagesState Space Search Lecture # 2nazim aliNo ratings yet
- Lecture 1: Introduction To Reinforcement Learning: David SilverDocument46 pagesLecture 1: Introduction To Reinforcement Learning: David SilverRajesh PuniaNo ratings yet
- ML Mid Sem Question BankDocument11 pagesML Mid Sem Question BankshreyashNo ratings yet
- CS8079 2marksDocument40 pagesCS8079 2marksmenakadevieceNo ratings yet
- Lab Manual of ISLDocument55 pagesLab Manual of ISLManisha HatzadeNo ratings yet
- UE20CS302 Unit3 SlidesDocument308 pagesUE20CS302 Unit3 SlidesKoushiNo ratings yet
- Soft Computing MCQ (9 Files Merged)Document416 pagesSoft Computing MCQ (9 Files Merged)Saksham SharmaNo ratings yet
- Unit 1: 1. Introduction To Artificial Neural NetworkDocument17 pagesUnit 1: 1. Introduction To Artificial Neural Networkjai geraNo ratings yet
- Learning Set of RulesDocument11 pagesLearning Set of RulesBikash Ranjan MallickNo ratings yet
- AI-Lecture 6 (Adversarial Search)Document68 pagesAI-Lecture 6 (Adversarial Search)Braga Gladys MaeNo ratings yet
- Ipmv NotesDocument125 pagesIpmv Notessniper x4848 PillaiNo ratings yet
- Unit 2 Machine Learning NotesDocument25 pagesUnit 2 Machine Learning NotesRADHARAPU DIVYA PECNo ratings yet
- PHP Chapter 2Document56 pagesPHP Chapter 2Haileyesus AdamuNo ratings yet
- Chapter 3 - Solving Problems by SearchingDocument71 pagesChapter 3 - Solving Problems by SearchingSamiNo ratings yet
- Chapter 3 - Solving Problems by Searching ConciseDocument67 pagesChapter 3 - Solving Problems by Searching ConciseSamiNo ratings yet
- Lecture02 AnalysisDocument46 pagesLecture02 AnalysisSamiNo ratings yet
- ADTOOPDocument46 pagesADTOOPSamiNo ratings yet
- Network and System Administration (Cosc 3063) Final Exam Weighted 50%Document2 pagesNetwork and System Administration (Cosc 3063) Final Exam Weighted 50%SamiNo ratings yet
- WFO KB Patching Results 2ndnov2023Document5 pagesWFO KB Patching Results 2ndnov2023SamiNo ratings yet
- CH-1 Introduction To Emerging TechnologyDocument41 pagesCH-1 Introduction To Emerging TechnologySami100% (3)
- 330656953Document52 pages330656953SamiNo ratings yet
- Module03 IpaddrDocument35 pagesModule03 IpaddrSamiNo ratings yet
- Chapt 1Document57 pagesChapt 1SamiNo ratings yet
- Supervised and Unsupervised Learning ExerciseDocument8 pagesSupervised and Unsupervised Learning ExerciseSamiNo ratings yet
- Chapter 2 AIDocument41 pagesChapter 2 AISamiNo ratings yet
- CH-5 Augmented RealityDocument18 pagesCH-5 Augmented RealitySamiNo ratings yet
- Class3 PDFDocument23 pagesClass3 PDFSamiNo ratings yet
- Seminar - I - Presentesion - Roaming - Fraud - Samuel - For Progresss - IIDocument21 pagesSeminar - I - Presentesion - Roaming - Fraud - Samuel - For Progresss - IISamiNo ratings yet
- Trees DatastructureDocument26 pagesTrees DatastructureSamiNo ratings yet
- Institutional Assessment Form 2013 Entry Campus Ayertena A.Y. 2015 E.CDocument3 pagesInstitutional Assessment Form 2013 Entry Campus Ayertena A.Y. 2015 E.CSamiNo ratings yet
- CH-1 Introduction To Emerging TechnologyDocument41 pagesCH-1 Introduction To Emerging TechnologySami100% (3)
- Chapter 3 - Solving Problems by SearchingDocument71 pagesChapter 3 - Solving Problems by SearchingSamiNo ratings yet
- System and Network Adminstration Final Exam Feb, 2023Document2 pagesSystem and Network Adminstration Final Exam Feb, 2023Sami89% (9)
- Chapter 3 - Solving Problems by Searching ConciseDocument67 pagesChapter 3 - Solving Problems by Searching ConciseSamiNo ratings yet
- Lecturer - 3 Algorithm AnalysisDocument59 pagesLecturer - 3 Algorithm AnalysisSamiNo ratings yet
- Chapter - 1 AIDocument40 pagesChapter - 1 AISamiNo ratings yet
- Becoming Telebirr AgentDocument147 pagesBecoming Telebirr AgentSami91% (33)
- Assignment 2Document3 pagesAssignment 2SamiNo ratings yet
- CH 6 Research EthicsDocument9 pagesCH 6 Research EthicsSamiNo ratings yet
- Accessaible Self ServiceDocument11 pagesAccessaible Self ServiceSamiNo ratings yet
- CH 7 Reporting Research FindingsDocument54 pagesCH 7 Reporting Research FindingsSamiNo ratings yet
- B. Configure The IP Address Listed in The Addressing Table For VLAN 1 On Both SwitchesDocument2 pagesB. Configure The IP Address Listed in The Addressing Table For VLAN 1 On Both SwitchesSamiNo ratings yet
- Template For The DocumentDocument23 pagesTemplate For The DocumentSamiNo ratings yet
- Shortnote LabDocument22 pagesShortnote LabSamiNo ratings yet
- Two Fair Dice, One Red and One Blue, Are Rolled. A Score Is - QuizletDocument11 pagesTwo Fair Dice, One Red and One Blue, Are Rolled. A Score Is - QuizletHemank SoniNo ratings yet
- Practice Math AA HL Paper1Document12 pagesPractice Math AA HL Paper1Subhodeep ChandaNo ratings yet
- Belgian CyclingDocument20 pagesBelgian CyclingMFNo ratings yet
- Engineering Economy - Time Value of MoneyDocument95 pagesEngineering Economy - Time Value of MoneygedamNo ratings yet
- Learn Python Quickly and Python Coding Exercises Coding For Beginners B08RDY478FDocument124 pagesLearn Python Quickly and Python Coding Exercises Coding For Beginners B08RDY478FAbel EkwonyeasoNo ratings yet
- Pset 6Document21 pagesPset 6Anirudth NNo ratings yet
- Laboratory ManualDocument62 pagesLaboratory Manualتبارك موسى كريم علوانNo ratings yet
- 3D Electric Calculation For A Station Class ZnO Surge Arrester For 1100kVDocument1 page3D Electric Calculation For A Station Class ZnO Surge Arrester For 1100kVadriasiq3068No ratings yet
- Difference Between Accuracy and PrecisionDocument34 pagesDifference Between Accuracy and PrecisionNiveniveNo ratings yet
- Sympy-0 7 2Document1,520 pagesSympy-0 7 2Luis Oliveira Silva100% (1)
- SEPTEMBER 26, 2021: Bsba-1 Marketing 8amDocument114 pagesSEPTEMBER 26, 2021: Bsba-1 Marketing 8amJerome DiassanNo ratings yet
- Pile DesignDocument13 pagesPile DesignMohafisto SofistoNo ratings yet
- Theory Equilibrium Distribution of Solute Between Immiscible SolventDocument3 pagesTheory Equilibrium Distribution of Solute Between Immiscible Solventviwe100% (1)
- 2000 ERU DESIGN OF CONTINUOUS PRISMATIC PRESTRESSED CONCRETE SPINE BEAMS WITH VARIABLE PRESTRESSING FORCES RanasingheWMDNJayasingheMTRDocument20 pages2000 ERU DESIGN OF CONTINUOUS PRISMATIC PRESTRESSED CONCRETE SPINE BEAMS WITH VARIABLE PRESTRESSING FORCES RanasingheWMDNJayasingheMTRVarun VermaNo ratings yet
- EJ1127589Document10 pagesEJ1127589TrinhNo ratings yet
- Kurushetra Problem SetDocument16 pagesKurushetra Problem Setjayaprakash89No ratings yet
- Internship ReportDocument37 pagesInternship ReportRaju SyedNo ratings yet
- Pearl and Reed Logistic CurveDocument6 pagesPearl and Reed Logistic CurveManpreet Kaur0% (1)
- HP 50g - ManualDocument184 pagesHP 50g - ManualMilutinMMNo ratings yet
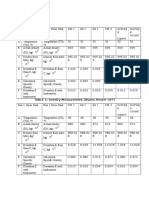
- Result: TABLE 1: Density Measurement (Water, Heater OFF)Document6 pagesResult: TABLE 1: Density Measurement (Water, Heater OFF)Zulfitri ZulkarnainNo ratings yet
- ELECTIVE 2 2nd QUIZDocument3 pagesELECTIVE 2 2nd QUIZJhonrey QuejadaNo ratings yet
- History and Development of ComputersDocument95 pagesHistory and Development of ComputersDion James LlacunaNo ratings yet
- Math5 - Q3 - M6 - Visualizing, Identifying and Describing Polygons With 5 or More SidesDocument20 pagesMath5 - Q3 - M6 - Visualizing, Identifying and Describing Polygons With 5 or More SidesCALMAREZ JOMEL100% (2)
- Varian - Chapter06 - Demand - Properties of Demand FunctionsDocument14 pagesVarian - Chapter06 - Demand - Properties of Demand FunctionsBella NovitasariNo ratings yet
- Experimental Error HTTPDocument6 pagesExperimental Error HTTPHamim SudarsonoNo ratings yet
- Koretsky CHDocument122 pagesKoretsky CHflowerlily629100% (3)
- Geometry: Quarter 1 - Module 6: Perimeter and Area of PolygonsDocument23 pagesGeometry: Quarter 1 - Module 6: Perimeter and Area of Polygonskyeopta jullieNo ratings yet
- Industrial Engineering-A Brief IntroDocument14 pagesIndustrial Engineering-A Brief IntroWilly K. Ng'etich100% (1)
- Actual DS - Data Science and Big Data Analytics Resume FormatDocument3 pagesActual DS - Data Science and Big Data Analytics Resume FormatLakshit MahavirNo ratings yet
- Programming Manual II Fx1s2Document224 pagesProgramming Manual II Fx1s2chaubinhkhang110686No ratings yet