You might also like
- Semiconductors, P-N Junctions & DiodesDocument34 pagesSemiconductors, P-N Junctions & DiodesAditya Kumar SinghNo ratings yet
- CH 3 1 emDocument25 pagesCH 3 1 emKritagyaNo ratings yet
- Edc Unit 1Document62 pagesEdc Unit 1raghul100% (1)
- EET 3153: Physical Electronics: Job Kerosi EmailDocument77 pagesEET 3153: Physical Electronics: Job Kerosi EmailOdhiambo MeshackNo ratings yet
- Four Probe MethodDocument101 pagesFour Probe MethodPanthoiba AkoijamNo ratings yet
- Diode Characteristics and Applications in 40 CharactersDocument58 pagesDiode Characteristics and Applications in 40 CharactersaparnaNo ratings yet
- BASICS OF SEMICONDUCTOR MATERIALSDocument36 pagesBASICS OF SEMICONDUCTOR MATERIALSUmesh JangidNo ratings yet
- Basics of Semiconductor Materials - With NotesDocument57 pagesBasics of Semiconductor Materials - With Notesgourishetty_raveesh100% (1)
- Unit1 PHY125Document108 pagesUnit1 PHY125Kishan DixitNo ratings yet
- Solid State Physics (Unit VI) : A Brief Overview of The UnitDocument56 pagesSolid State Physics (Unit VI) : A Brief Overview of The UnitGaurav Dhar DubeyNo ratings yet
- ElectronicsDocument348 pagesElectronicsJOSPHAT YEGONNo ratings yet
- Mobility: Carrier Transport. Co Efficient - MobilityDocument23 pagesMobility: Carrier Transport. Co Efficient - Mobilityprashant4455No ratings yet
- Electronics Engineering (Survival Kit)Document45 pagesElectronics Engineering (Survival Kit)spidyanNo ratings yet
- Modern Physics PHY1008Document89 pagesModern Physics PHY1008Dannapurna DNo ratings yet
- Introduction To SemiconductorsDocument58 pagesIntroduction To SemiconductorsDhananjay ShimpiNo ratings yet
- BEC Unit 1 PDFDocument118 pagesBEC Unit 1 PDFMukhesh InturiNo ratings yet
- MRRMA - Chapter 1 - Introduction To Electrical and ElectronicsDocument61 pagesMRRMA - Chapter 1 - Introduction To Electrical and ElectronicsACC SHNo ratings yet
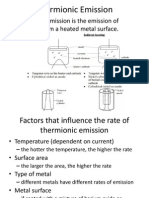
- Thermionic EmissionDocument22 pagesThermionic EmissionHazel LawNo ratings yet
- ME 361 Lecture 16: Thermal Machining ProcessesDocument33 pagesME 361 Lecture 16: Thermal Machining ProcessesSahil SundaNo ratings yet
- Microelectronic Circuit Design Physical Operation Jing Ren Faculty of EngineeringDocument32 pagesMicroelectronic Circuit Design Physical Operation Jing Ren Faculty of EngineeringLeslie BensonNo ratings yet
- Lec2 Gas DetectorsDocument37 pagesLec2 Gas DetectorsMuhammad Naveed100% (1)
- Electromag Module 1 MidtermsDocument42 pagesElectromag Module 1 MidtermsZylah NorberteNo ratings yet
- Subject Name: Electromagnetic Theory Subject Code: Ee 2202 Branch: Eee Semester: Iii Unit - Iii ContentsDocument19 pagesSubject Name: Electromagnetic Theory Subject Code: Ee 2202 Branch: Eee Semester: Iii Unit - Iii ContentsShafiq RahmanNo ratings yet
- Spin Valve TransistorDocument22 pagesSpin Valve Transistorbvenugopal_2No ratings yet
- Subject: Basic Electrical and Electronics Principles: Training Programme For ACTAVIS Employees (2008/2009)Document18 pagesSubject: Basic Electrical and Electronics Principles: Training Programme For ACTAVIS Employees (2008/2009)Alfred GaleaNo ratings yet
- Semiconductors Properties PDFDocument87 pagesSemiconductors Properties PDFKarthika SathishNo ratings yet
- Applied PV Engineering - Lecture 3&4 NewDocument40 pagesApplied PV Engineering - Lecture 3&4 Newnasir siyarNo ratings yet
- Chapter 1-Semiconductor MaterialsDocument62 pagesChapter 1-Semiconductor MaterialsMd Masudur Rahman Abir100% (1)
- Electrical Properties of SolidsDocument54 pagesElectrical Properties of SolidsAnthonio MJNo ratings yet
- SemiconductorsDocument36 pagesSemiconductorsKalai YarasiNo ratings yet
- Nanomaterials PropertiesDocument60 pagesNanomaterials PropertieshatephuongNo ratings yet
- TOPIC 1introduction To SemiconductorDocument33 pagesTOPIC 1introduction To SemiconductorF1038 IFFAH SYAZANA BINTI MD HASNIN HADINo ratings yet
- Electronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 1From EverandElectronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 1No ratings yet
- Microelectronics Course OverviewDocument30 pagesMicroelectronics Course OverviewmuzammilNo ratings yet
- Physics Project 2023Document25 pagesPhysics Project 2023saikatsarkar409No ratings yet
- Intro to Basic Electronics FundamentalsDocument113 pagesIntro to Basic Electronics FundamentalsEfuaNo ratings yet
- Introduction To Basic ElectronicsDocument94 pagesIntroduction To Basic ElectronicsAma Serwaa YeboahNo ratings yet
- Hysteresis in Ferromagnetic Materials ExperimentDocument8 pagesHysteresis in Ferromagnetic Materials ExperimentbpmurtaNo ratings yet
- Lecture 1 - Electrical EngineeringDocument33 pagesLecture 1 - Electrical Engineeringصالح طاهرNo ratings yet
- WCNDT-EC WrokshopDocument106 pagesWCNDT-EC WrokshopAzhar GulzarNo ratings yet
- ON Estructive Esting: (Core Elective For 3 Yr. Mech. Students)Document58 pagesON Estructive Esting: (Core Elective For 3 Yr. Mech. Students)ganesh gowthamNo ratings yet
- Chap 2Document30 pagesChap 2api-3717843No ratings yet
- Lesson 1 - Electronics1Document41 pagesLesson 1 - Electronics1Ron Neil MicosaNo ratings yet
- Active Electronic Devices 1: Unit 3Document52 pagesActive Electronic Devices 1: Unit 3Swapnil ThoratNo ratings yet
- Notes On Semi ConductorsDocument11 pagesNotes On Semi ConductorsChitransh AwasthiNo ratings yet
- PhotoluminescenceDocument60 pagesPhotoluminescenceMustaque Ali100% (1)
- Electronics Lecture No. 1: Assistant Lecturer Mohammed Dyhia Ali 2017-2018Document30 pagesElectronics Lecture No. 1: Assistant Lecturer Mohammed Dyhia Ali 2017-2018Mohammed Dyhia Ali100% (3)
- LN01Document39 pagesLN0111b07paridhijainNo ratings yet
- Chapter 2: Basic Concepts and Parameters of Plasma Physics: KT T T Ne NDocument13 pagesChapter 2: Basic Concepts and Parameters of Plasma Physics: KT T T Ne NRoy VeseyNo ratings yet
- Edca Unit 1Document19 pagesEdca Unit 1rsnagakumarNo ratings yet
- Chemistry: Atoms, Molecules, & Chemical BondingDocument149 pagesChemistry: Atoms, Molecules, & Chemical BondingnadnotmeNo ratings yet
- ElectricityDocument53 pagesElectricitySONG YING XIN MoeNo ratings yet
- Engineering Material: Electrical PropertiesDocument35 pagesEngineering Material: Electrical PropertiesKentChonNo ratings yet
- Introduction To Nano-Materials ""Moqademe""Document28 pagesIntroduction To Nano-Materials ""Moqademe""Jihad AbdullahNo ratings yet
- Measurement and Transducers Unit 2Document76 pagesMeasurement and Transducers Unit 2Sagar VermaNo ratings yet
- Lecture1 Resistive CircuitsDocument33 pagesLecture1 Resistive CircuitsKartika MunirNo ratings yet
- 21 Lecture Outline - ppt52Document64 pages21 Lecture Outline - ppt52Jumar CadondonNo ratings yet
- Nanotech Sorular CevaplarDocument28 pagesNanotech Sorular CevaplarOlea CatărăuNo ratings yet
- Base PlateDocument34 pagesBase PlaterohitnrgNo ratings yet
- Developing An Individual Excel Sheet For Design and Analysis of Beam and SlabDocument30 pagesDeveloping An Individual Excel Sheet For Design and Analysis of Beam and SlabIJRASETPublicationsNo ratings yet
- Bending Stress, σ M y I π d M r J π dDocument2 pagesBending Stress, σ M y I π d M r J π dRashid AnzoomNo ratings yet
- Chapter Nineteen Base Plate: 19.1 Base Plates For Axially Loaded ColumnsDocument76 pagesChapter Nineteen Base Plate: 19.1 Base Plates For Axially Loaded ColumnsTatingJainarNo ratings yet
- FALLSEM2021-22 MEE3001 TH VL2021220103058 Reference Material I 23-Aug-2021 Module 2 Design Against Fluctuating LoadDocument78 pagesFALLSEM2021-22 MEE3001 TH VL2021220103058 Reference Material I 23-Aug-2021 Module 2 Design Against Fluctuating LoadJude JohnNo ratings yet
- Elevator DSA OSHPDDocument2 pagesElevator DSA OSHPDjorge01No ratings yet
- Applications & Mechanical Properties of FRPDocument34 pagesApplications & Mechanical Properties of FRPAhmedHassen7No ratings yet
- Behavior and Design of Gusset Plate Connections in CompressionDocument17 pagesBehavior and Design of Gusset Plate Connections in CompressionNaomi PratiwiNo ratings yet
- Analysis and Design of Circular Prestressed Concrete Storage TanksDocument22 pagesAnalysis and Design of Circular Prestressed Concrete Storage Tankschondroc11No ratings yet
- DESIGN OF TRASHRACK COLUMNDocument22 pagesDESIGN OF TRASHRACK COLUMNmadhu sudhanNo ratings yet
- Mechanics of Materials Solutions Chapter08 Probs65 81Document32 pagesMechanics of Materials Solutions Chapter08 Probs65 81Sadonasy100% (1)
- Machine Design by E.L. WallaceDocument186 pagesMachine Design by E.L. Wallacenavodit14No ratings yet
- Etabs Column DesignDocument15 pagesEtabs Column Designmagdyamdb100% (1)
- Pres Tress I-Girder Design SheetDocument70 pagesPres Tress I-Girder Design Sheetarif_rubinNo ratings yet
- Installation - Typical 3.3m.precast Concrete Beam Design (EN1992)Document5 pagesInstallation - Typical 3.3m.precast Concrete Beam Design (EN1992)zms msswiNo ratings yet
- Splice DesignDocument91 pagesSplice DesignPrantik Adhar Samanta100% (1)
- Beam-column designDocument23 pagesBeam-column designWilbert ReuyanNo ratings yet
- Lehigh University Library Fritz Laboratory Reports - Shear Strength of Plate GirdersDocument62 pagesLehigh University Library Fritz Laboratory Reports - Shear Strength of Plate GirdersMaria FabianaNo ratings yet
- Design of Movable BridgesDocument22 pagesDesign of Movable BridgesNandeesha RameshNo ratings yet
- Edoc - Pub - Transformer Foundation DesignDocument26 pagesEdoc - Pub - Transformer Foundation DesigndineshNo ratings yet
- Snap-Fit Joints For PlasticsDocument26 pagesSnap-Fit Joints For Plasticsmadhusudhan.bhumireddi100% (1)
- Lecture 17: Design and Static Strength of Welded JointsDocument36 pagesLecture 17: Design and Static Strength of Welded Jointssprashant5No ratings yet
- Tubesheet HE-20 (ASME) Con Spiral Wound PDFDocument28 pagesTubesheet HE-20 (ASME) Con Spiral Wound PDFMilena Lemus FonsecaNo ratings yet
- Slab Analysis: Gato, Jocelyn BSCE-IVBDocument24 pagesSlab Analysis: Gato, Jocelyn BSCE-IVBjoanNo ratings yet
- SMARTDEK 51 Slab Sample DesignDocument18 pagesSMARTDEK 51 Slab Sample DesignMcr Kumara100% (1)
- Hobbacher-2015-Recommendations For Fatigue Design of Welded Joints and ComponentsDocument26 pagesHobbacher-2015-Recommendations For Fatigue Design of Welded Joints and Componentsbalaji817150No ratings yet
- RC Chapter 8Document14 pagesRC Chapter 8ianiroy130% (1)
- MEC302 Thermodynamics 04: University of Mumbai, B. E. (Mechanical Engineering), Rev 2016Document34 pagesMEC302 Thermodynamics 04: University of Mumbai, B. E. (Mechanical Engineering), Rev 2016BALAJI IKALENo ratings yet
- Guidelines for Design of Wind TurbinesDocument7 pagesGuidelines for Design of Wind TurbinesAndres GranadosNo ratings yet
- Basics of Ship VibrationDocument17 pagesBasics of Ship Vibrationbhuktha100% (2)