You might also like
- Identity and Image: Refugee Artists from Nazi Germany in Britain (1933-1945)From EverandIdentity and Image: Refugee Artists from Nazi Germany in Britain (1933-1945)No ratings yet
- Physics I Class 13: General Rotational MotionDocument15 pagesPhysics I Class 13: General Rotational Motionjohnson joseNo ratings yet
- Adk 4Document2 pagesAdk 4Aditya IlhamNo ratings yet
- A Wide Constant Power Range Vector Controlled Ac Motor Drive UsiDocument6 pagesA Wide Constant Power Range Vector Controlled Ac Motor Drive UsiArjun Korintian PurbaNo ratings yet
- Hfe JBL l300 en Alt ScanDocument13 pagesHfe JBL l300 en Alt ScanthomasNo ratings yet
- Nature Tarot Wild Wood Tarot PDFDocument160 pagesNature Tarot Wild Wood Tarot PDFRuang Enigma80% (5)
- Propagation Models: What Are They For? Regulatory vs. Scientific Issues. Modes of Propagation. The ModelsDocument29 pagesPropagation Models: What Are They For? Regulatory vs. Scientific Issues. Modes of Propagation. The ModelsyoumnizNo ratings yet
- flow meter SS 类Document14 pagesflow meter SS 类Yein SawoungNo ratings yet
- 1st Year QPDocument103 pages1st Year QPPKSachanNo ratings yet
- ManacDocument16 pagesManacamit.rana21No ratings yet
- Aim ScheduleDocument4 pagesAim Schedulesatyam mehrotraNo ratings yet
- A Practical Guide For EN 61000-4-6: Testing and Measurement TechniquesDocument29 pagesA Practical Guide For EN 61000-4-6: Testing and Measurement TechniquesaltugNo ratings yet
- Moosers TrainDocument13 pagesMoosers TrainGavin VroegopNo ratings yet
- Borehole Deviation Probe Devprobe1: Devprob1 With Cable and DrumDocument1 pageBorehole Deviation Probe Devprobe1: Devprob1 With Cable and DrumInti FermatNo ratings yet
- Coordinate SystemDocument18 pagesCoordinate SystemWAWAWAW ohawwwNo ratings yet
- Resolver HT-20CDocument2 pagesResolver HT-20CRAMIRO LOPEZNo ratings yet
- Hindi TranslatorDocument2 pagesHindi Translatorrvjcdl460No ratings yet
- Aps Mid 2016Document1 pageAps Mid 2016Mansoor SarwarNo ratings yet
- ZXD T02 S201 Solar Charge Controller Manual v1 or 2Document35 pagesZXD T02 S201 Solar Charge Controller Manual v1 or 2Ermias Desta100% (1)
- State of Content Marketing 2022 PDFDocument115 pagesState of Content Marketing 2022 PDFPersonal MailNo ratings yet
- Candlestick - Um Método para Ampliar Lucros Na Bolsa de Valores PDFDocument100 pagesCandlestick - Um Método para Ampliar Lucros Na Bolsa de Valores PDFKleiton Matias100% (1)
- Autoregressive Moving Average Models: Time Series: Applications To Finance With R and S-Plus, Second EditionDocument15 pagesAutoregressive Moving Average Models: Time Series: Applications To Finance With R and S-Plus, Second EditionChaudhary Sohail ShafiqNo ratings yet
- Dorf Chapter 10Document22 pagesDorf Chapter 10ekasNo ratings yet
- Review: LanguageDocument1 pageReview: LanguageSOUFIAN AKABBALNo ratings yet
- IPPD Rejosari 2017Document7 pagesIPPD Rejosari 2017Aslina KenitaNo ratings yet
- RF Power Amplifier FundamentalsDocument1 pageRF Power Amplifier FundamentalsEnos Marcos BastosNo ratings yet
- 4 5958721043878120205Document186 pages4 5958721043878120205doux3dddNo ratings yet
- Keydeploymentindicators (Kdis) : Rev:B Wirelinewinchingprocedures-OpenholeDocument1 pageKeydeploymentindicators (Kdis) : Rev:B Wirelinewinchingprocedures-OpenholeDevia SuswodijoyoNo ratings yet
- Bip 0125-2011Document234 pagesBip 0125-2011ali rabieeNo ratings yet
- A Frequency Domain Method For Tuning Hydro GovernorsDocument4 pagesA Frequency Domain Method For Tuning Hydro GovernorsadinamartinsNo ratings yet
- New Doc 2019-04-03 21Document1 pageNew Doc 2019-04-03 21api-421740739No ratings yet
- Flash Annealing Amorphous Alloys: SeptemberDocument3 pagesFlash Annealing Amorphous Alloys: SeptemberAMS Lab.No ratings yet
- CPT 205 - Tutorial 5Document3 pagesCPT 205 - Tutorial 5Nishfaan NaseerNo ratings yet
- Are Investors R Eluctant To R Ealize Their Losses?Document34 pagesAre Investors R Eluctant To R Ealize Their Losses?MuhammadNo ratings yet
- ProjectileDocument6 pagesProjectileSaikat BanerjeeNo ratings yet
- Kepler and His ProblemDocument9 pagesKepler and His ProblemdertweasrNo ratings yet
- Unit 4 Technology in SportDocument6 pagesUnit 4 Technology in SportTomás Ignacio Dobson VivancoNo ratings yet
- Easy 2 - BodyDocument140 pagesEasy 2 - BodyMinelleNo ratings yet
- Database Management System (CS601)Document7 pagesDatabase Management System (CS601)software projectNo ratings yet
- Administrator, 1032125arDocument11 pagesAdministrator, 1032125ardasdasNo ratings yet
- The Internal Ballistics of An Air GunDocument4 pagesThe Internal Ballistics of An Air GunkhaledNo ratings yet
- Lintas Sumatera Mesuji (TPQJ) (MS)Document2 pagesLintas Sumatera Mesuji (TPQJ) (MS)Ila MaNo ratings yet
- Design of Skirt Support: S 18,000 Stress Value E" 0.60 For Butt Joint of SA-285-CplateDocument1 pageDesign of Skirt Support: S 18,000 Stress Value E" 0.60 For Butt Joint of SA-285-CplateAsad1001No ratings yet
- Anobject Isthevelocityof Theintervals0 + 0 - 5 For10 Themaximumvelocityof (4) Thedistance (9)Document3 pagesAnobject Isthevelocityof Theintervals0 + 0 - 5 For10 Themaximumvelocityof (4) Thedistance (9)Chai Min HiungNo ratings yet
- Lec15-Conservation of Angular MomentumDocument12 pagesLec15-Conservation of Angular MomentumpvriiscNo ratings yet
- PLAN - JBL - Enclosure Construction Plan (Signature - Models 35, 36, 37, 38, 39)Document4 pagesPLAN - JBL - Enclosure Construction Plan (Signature - Models 35, 36, 37, 38, 39)dapira9325No ratings yet
- To Draw A Bode Diagram For A Transfer Function There Are Three StepsDocument7 pagesTo Draw A Bode Diagram For A Transfer Function There Are Three Stepsfajark8No ratings yet
- RWG 4 0 2 0 RWG 5 0 2 0 ExDocument8 pagesRWG 4 0 2 0 RWG 5 0 2 0 ExsdfsfgNo ratings yet
- RWG 4 0 2 0 RWG 5 0 2 0 ExDocument8 pagesRWG 4 0 2 0 RWG 5 0 2 0 ExsdfsfgNo ratings yet
- Week 8-Performance TaskDocument17 pagesWeek 8-Performance TaskMaria Jerecca SierraNo ratings yet
- Numerical Study On Flow Past 2D Square Cylinder by Large Eddy Simulation - Comparison Between 2D and 3D ComputationsDocument8 pagesNumerical Study On Flow Past 2D Square Cylinder by Large Eddy Simulation - Comparison Between 2D and 3D ComputationsMai ZhangNo ratings yet
- 副本 Berkeley KB1 STEAM and DIE Story-The WoodcutterDocument3 pages副本 Berkeley KB1 STEAM and DIE Story-The WoodcutterVicky HNo ratings yet
- Exam ProblemDocument2 pagesExam Problemkingsy13No ratings yet
- Simple Entropic Derivation of A Generalized Black-Scholes Option Pricing Model-Entropy-02-00070Document8 pagesSimple Entropic Derivation of A Generalized Black-Scholes Option Pricing Model-Entropy-02-00070ognjanovicNo ratings yet
- (Sobuj Boi) Impact of Jet (Chapter 11)Document35 pages(Sobuj Boi) Impact of Jet (Chapter 11)Tawsif Zaman Arnob, 180011117No ratings yet
- El Concepto Del Esfuerzo: X y X yDocument19 pagesEl Concepto Del Esfuerzo: X y X yjaviersalcedo21No ratings yet
- TP 7 CorrosionDocument2 pagesTP 7 CorrosionVer FeNo ratings yet
- 1216963Document9 pages1216963nausheenbushra6No ratings yet
- Masas SaladasDocument64 pagesMasas SaladasDaniel Gonzalez LosadaNo ratings yet
- RMA2885 Investigation Report Rev. BDocument4 pagesRMA2885 Investigation Report Rev. Bangel CastilloNo ratings yet
- Lec16-Review ActivityDocument5 pagesLec16-Review ActivitypvriiscNo ratings yet
- Lec14-Cross Product, Torque, and Angular MomentumDocument13 pagesLec14-Cross Product, Torque, and Angular MomentumpvriiscNo ratings yet
- Lec10-Potential Energy and Kinetic Energy in Spring SystemsDocument10 pagesLec10-Potential Energy and Kinetic Energy in Spring SystemspvriiscNo ratings yet
- Physics I Class 12: Uniform Circular MotionDocument20 pagesPhysics I Class 12: Uniform Circular MotionDerrick Maatla MoadiNo ratings yet
- Lec05-Impulse and MomentumDocument18 pagesLec05-Impulse and MomentumpvriiscNo ratings yet
- Lec02-2d MotionDocument22 pagesLec02-2d MotionpvriiscNo ratings yet
- Lec03-Newton's Laws of MotionDocument19 pagesLec03-Newton's Laws of MotionpvriiscNo ratings yet
- Lec06-Conservation of MomentumDocument18 pagesLec06-Conservation of MomentumpvriiscNo ratings yet
- Lec08-Work and Kinetic EnergyDocument11 pagesLec08-Work and Kinetic EnergypvriiscNo ratings yet
- Aerospace Employability and Career EnhancementDocument3 pagesAerospace Employability and Career Enhancementpvriisc0% (1)
- Physics of Everyday Phenomena A Conceptual Introduction To Physics 8th Edition Griffith Brosing Solution ManualDocument7 pagesPhysics of Everyday Phenomena A Conceptual Introduction To Physics 8th Edition Griffith Brosing Solution Manualrobin100% (25)
- 110 41a Skema Pemarkahan Modul Fizik T4-2-18Document17 pages110 41a Skema Pemarkahan Modul Fizik T4-2-18Erlena RahimNo ratings yet
- COE 105 Chapter3 KinematicsDocument9 pagesCOE 105 Chapter3 Kinematicsjethrocunanan04No ratings yet
- Distance Time and Velocity TimeDocument7 pagesDistance Time and Velocity TimeValeria BlancoNo ratings yet
- Motion NotesDocument5 pagesMotion NotesmallikaNo ratings yet
- Name: - Period: - Speed/Velocity/Acceleration Packet of Awesome Problems For You To DoDocument3 pagesName: - Period: - Speed/Velocity/Acceleration Packet of Awesome Problems For You To DoJohanne K. AtiwNo ratings yet
- Unit 2: Uniform Acceleration Worksheet 6: T 0 To T 6.00 SDocument3 pagesUnit 2: Uniform Acceleration Worksheet 6: T 0 To T 6.00 SAbdinasir DhancadeNo ratings yet
- 02A - Modul A+ Fizik Tg4 - WMDocument22 pages02A - Modul A+ Fizik Tg4 - WMalia azizNo ratings yet
- TrainsDocument10 pagesTrainsSanya BahriNo ratings yet
- Time and Distance ClassDocument55 pagesTime and Distance ClassAlone Time100% (1)
- Choose The Correct AnswerDocument10 pagesChoose The Correct AnswerAutumn LlorenNo ratings yet
- Uniformly Accelerated Motion (UAM)Document18 pagesUniformly Accelerated Motion (UAM)eonaarwen camorroNo ratings yet
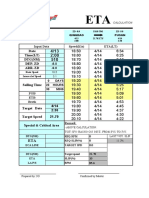
- Date Time (LT) DTG (NM) Dep. ZD Arr. ZD: Input Data Speed (KTS) Eta (LT)Document3 pagesDate Time (LT) DTG (NM) Dep. ZD Arr. ZD: Input Data Speed (KTS) Eta (LT)Myint ZawNo ratings yet
- PhysicsSE 10 Ch02 PowerPointsDocument104 pagesPhysicsSE 10 Ch02 PowerPointsmkdatosNo ratings yet
- Numericals For MotionDocument2 pagesNumericals For MotionArpit Gaming YtNo ratings yet
- Physics NotesDocument111 pagesPhysics NotesLeroy ChuaNo ratings yet
- Acceleration Velocity and Position Graphs WorksheetDocument4 pagesAcceleration Velocity and Position Graphs Worksheetsaini.hersheyNo ratings yet
- Science 7 Activity 1 Lesson 2Document1 pageScience 7 Activity 1 Lesson 2Rosemarie CañeteNo ratings yet
- Kinematics FDocument83 pagesKinematics F蒋欢欢No ratings yet
- G17 - Dynamics - Rectilinear Motion - ProblemsDocument27 pagesG17 - Dynamics - Rectilinear Motion - ProblemsIsrael MGNo ratings yet
- Ncert Solutions Class 11 Physics Chapter 3 Motion in A Straight Line 0Document36 pagesNcert Solutions Class 11 Physics Chapter 3 Motion in A Straight Line 0StaryNo ratings yet
- MotionDocument6 pagesMotionNikka FerrerNo ratings yet
- 09.rotational Mechanics.5Document39 pages09.rotational Mechanics.5Blazing Finix987No ratings yet
- Uniform Circular MotionDocument23 pagesUniform Circular MotionAbdul Ahad SajjadNo ratings yet
- Motion - Worksheet 2Document4 pagesMotion - Worksheet 2Shrijeet SomaniNo ratings yet
- Intregration PT 2Document4 pagesIntregration PT 2Augustin LouisNo ratings yet
- Test Bank For Halliday and Resnicks Fundamentals of Physics 11th EditionDocument24 pagesTest Bank For Halliday and Resnicks Fundamentals of Physics 11th EditionMichaelJohnstondetk100% (44)
- IB PHYSICS 2.1 Presentation All UnitDocument52 pagesIB PHYSICS 2.1 Presentation All UnitJustCallMeLarryNo ratings yet
- 30-15 IFT - Automatic StagesDocument11 pages30-15 IFT - Automatic StagesAbdel ATMANINo ratings yet
- Train Class SheetDocument9 pagesTrain Class Sheetmagmeme82No ratings yet