You might also like
- Hệ thống định vị toàn cầu GPSDocument24 pagesHệ thống định vị toàn cầu GPSvietdniit0% (1)
- Mạch Đồng Hồ Hiển Thị Giờ Phút GiâyDocument10 pagesMạch Đồng Hồ Hiển Thị Giờ Phút Giâyangelka1No ratings yet
- Do An CTMDocument61 pagesDo An CTMLuận NguyễnNo ratings yet
- Lý Thuyết LTĐKTĐDocument19 pagesLý Thuyết LTĐKTĐducNo ratings yet
- Tailieuxanh Tran Minh Tu N Copy 1777Document67 pagesTailieuxanh Tran Minh Tu N Copy 1777Cường Bùi MạnhNo ratings yet
- Chi Tiết Máy: Bài Tập LớnDocument23 pagesChi Tiết Máy: Bài Tập LớnTrần HuyNo ratings yet
- ĐỒ ÁN CHI TIẾT MÁYDocument65 pagesĐỒ ÁN CHI TIẾT MÁYNguyen Tien DungNo ratings yet
- báo cáo điều khiển động cơDocument12 pagesbáo cáo điều khiển động cơĐông NguyễnNo ratings yet
- Nghiên Cứu Phương Pháp Chỉnh Định Bộ Điều Khiển PID Cho Các Hệ Thống Có Trễ Vận Tải (Dựa Trên Lý Thuyết Hermite-Biehler)Document94 pagesNghiên Cứu Phương Pháp Chỉnh Định Bộ Điều Khiển PID Cho Các Hệ Thống Có Trễ Vận Tải (Dựa Trên Lý Thuyết Hermite-Biehler)Man EbookNo ratings yet
- EmtyDocument61 pagesEmtyTy CoonNo ratings yet
- L01 NHOM7 BaoCaoBTLDocument17 pagesL01 NHOM7 BaoCaoBTLTrần CườngNo ratings yet
- HCMUS - AI Course ReportDocument10 pagesHCMUS - AI Course Reportlebui185No ratings yet
- Báo Cáo Mẫu 4 (9.5 Điểm)Document61 pagesBáo Cáo Mẫu 4 (9.5 Điểm)Prosie VNo ratings yet
- Dieu Khien Dong Co 1 ChieuDocument44 pagesDieu Khien Dong Co 1 ChieuTrương Văn TrọngNo ratings yet
- Báo Cáo BTL VL1Document23 pagesBáo Cáo BTL VL1Lại Nguyễn Duy100% (1)
- BTL KT RobotDocument30 pagesBTL KT RobotHuy Từ Phạm NgọcNo ratings yet
- Mô hình hóa động lực họcDocument5 pagesMô hình hóa động lực họcpvdai100% (2)
- Mô phỏng UAV và các thuật toán trong quân sựDocument4 pagesMô phỏng UAV và các thuật toán trong quân sựNguyễn Hữu ĐứcNo ratings yet
- Thuyết Minh PBL2 Nhóm 1Document37 pagesThuyết Minh PBL2 Nhóm 1Hà Phi LongNo ratings yet
- Mo Phong Dieu Che Khoa Dich Pha QPSK 4psk Bang MatlabDocument14 pagesMo Phong Dieu Che Khoa Dich Pha QPSK 4psk Bang MatlabNgọc BùiNo ratings yet
- De Thi Mon May DienDocument32 pagesDe Thi Mon May DienTriếtCỏNo ratings yet
- De Thi UDTH Chi Tiet May NewsDocument2 pagesDe Thi UDTH Chi Tiet May NewsseabesthubtNo ratings yet
- hệ thống điều khiển quạt gió cánh phẳngDocument28 pageshệ thống điều khiển quạt gió cánh phẳngDuy LânNo ratings yet
- Báo Cáo Mẫu 4 (9.5 Điểm)Document63 pagesBáo Cáo Mẫu 4 (9.5 Điểm)Prosie VNo ratings yet
- Wind Control Strategy For QuadcopterDocument22 pagesWind Control Strategy For QuadcopterSon CaoNo ratings yet
- đề labviewDocument3 pagesđề labviewĐỗ Xuân HiếuNo ratings yet
- Đồ Án Chi Tiết Máy Đề 3Document19 pagesĐồ Án Chi Tiết Máy Đề 3truc voNo ratings yet
- Hai BKHN (Xích)Document63 pagesHai BKHN (Xích)MinhAnhNo ratings yet
- Luan Van Ve UAV PDFDocument72 pagesLuan Van Ve UAV PDFAnh PhanNo ratings yet
- PHIẾU HỌC TẬP CÁ NHÂNDocument3 pagesPHIẾU HỌC TẬP CÁ NHÂNHoàng Nguyễn CôngNo ratings yet
- Định luật vạn vật hấp dẫn và các định luật keplerDocument55 pagesĐịnh luật vạn vật hấp dẫn và các định luật keplerMark Nguyen100% (1)
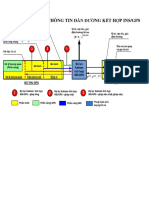
- Hệ Thống Xử Lý Thông Tin Dẫn Đường Kết Hợp InsDocument13 pagesHệ Thống Xử Lý Thông Tin Dẫn Đường Kết Hợp Insyenninh86No ratings yet
- Tinh Toan Thiet Ke Thiet Bi Dien Tu Cong Suat Tran Van Thinh p2 8737Document125 pagesTinh Toan Thiet Ke Thiet Bi Dien Tu Cong Suat Tran Van Thinh p2 8737Thành CôngNo ratings yet
- Asm - Giai Đo N 1 (Ac18102)Document24 pagesAsm - Giai Đo N 1 (Ac18102)Béo TiếnNo ratings yet
- Tiểu Luận Hệ Thống Dẫn Đường Mặt Đất Hàng KhôngDocument59 pagesTiểu Luận Hệ Thống Dẫn Đường Mặt Đất Hàng KhôngHUY NGUYEN QUANGNo ratings yet
- Thiet Ke He Thong Dan Dong Thung TronDocument55 pagesThiet Ke He Thong Dan Dong Thung TronHanh_Diep_123100% (1)
- Bai 15 Tich Phan Duong Loai 2Document50 pagesBai 15 Tich Phan Duong Loai 2vthonghuynh100% (8)
- Me4506 Đa TKHTCK CĐTTMDocument8 pagesMe4506 Đa TKHTCK CĐTTMPhong Dang0% (1)
- Doan TKM De9 NontruDocument2 pagesDoan TKM De9 NontruLết LêNo ratings yet
- BTL ThongTinQuangDocument29 pagesBTL ThongTinQuangHương Mai ĐỗNo ratings yet
- bài tập lon chi tiêt máy mẫuDocument38 pagesbài tập lon chi tiêt máy mẫuNhật Hưng NetNo ratings yet
- Bài tập sau chương file PDFDocument26 pagesBài tập sau chương file PDFPhúc VõNo ratings yet
- Đề cương ôn tập môn QHGTVT 2021Document5 pagesĐề cương ôn tập môn QHGTVT 2021Yến TrầnNo ratings yet
- Báo cáo chuyên đề XLTHTT nhóm 18Document10 pagesBáo cáo chuyên đề XLTHTT nhóm 18Phúc PhạmNo ratings yet
- Huong Dan Bai Tap MDocument19 pagesHuong Dan Bai Tap Mtien oanh buiNo ratings yet
- Báo Cáo Điều Khiển SốDocument29 pagesBáo Cáo Điều Khiển SốDuy Hung VuNo ratings yet
- PBL2 - Thiet Ke Dong Co - Nhom1Document1 pagePBL2 - Thiet Ke Dong Co - Nhom1Trương Công ĐạtNo ratings yet
- Đồ án kết cấu động cơ đốt trongDocument42 pagesĐồ án kết cấu động cơ đốt trongChung Nguyễn Phan BảoNo ratings yet
- Chương 5. 6- Bộ Truyền Trục VítDocument25 pagesChương 5. 6- Bộ Truyền Trục VítTien AnhNo ratings yet
- Câu Hỏi Ôn Thi Trắc Nghiệm Vật Liệu HọcDocument2 pagesCâu Hỏi Ôn Thi Trắc Nghiệm Vật Liệu Họcvu4sutu2No ratings yet
- Bai Tap Truyen Dong Dien 8706Document10 pagesBai Tap Truyen Dong Dien 8706Tấn HùngNo ratings yet
- Bai Giang Cong Nghe Kim Loai - KXVDocument115 pagesBai Giang Cong Nghe Kim Loai - KXVduc anhNo ratings yet
- Đ Án Thiết Kế Hệ Thống Dẫn Động Xích Tải (Kèm File Autocad Full)Document24 pagesĐ Án Thiết Kế Hệ Thống Dẫn Động Xích Tải (Kèm File Autocad Full)Tieu Ngoc LyNo ratings yet
- Báo Cáo Hunting SnakeDocument34 pagesBáo Cáo Hunting SnakeNight FuryNo ratings yet
- Bộ Truyền Bánh Răng TrụDocument16 pagesBộ Truyền Bánh Răng TrụANH TIEN TRANNo ratings yet
- BTL VL1Document13 pagesBTL VL1Antoine NewtNo ratings yet
- Bài thí nghiệm số 2Document3 pagesBài thí nghiệm số 2Nguyễn Thành NguyênNo ratings yet
- định vị GPSDocument75 pagesđịnh vị GPSPhạm HùngNo ratings yet
- Chuong 7 He Thong Dinh Vi GNSSDocument34 pagesChuong 7 He Thong Dinh Vi GNSSLinh KTNo ratings yet