You might also like
- Cockmenu - Lua 1Document330 pagesCockmenu - Lua 1Tomasz BielińskiNo ratings yet
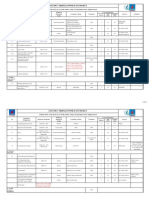
- Itp For Steel Structure Erection (Content) Rev.1Document3 pagesItp For Steel Structure Erection (Content) Rev.1Anonymous nLMJGu100% (6)
- Major Training Report-Jamna AutoDocument19 pagesMajor Training Report-Jamna AutoSumit gupta100% (2)
- Monitors and Its TypesDocument5 pagesMonitors and Its Typesasma farooq100% (2)
- HistorianClient 2014 R2 - RevBDocument368 pagesHistorianClient 2014 R2 - RevBviral patel0% (1)
- PP Group2 Report2 3 Wheels RobotDocument13 pagesPP Group2 Report2 3 Wheels RobotTrần Nam sơnNo ratings yet
- Chapter 8 Dynamics and Control of RobotsDocument30 pagesChapter 8 Dynamics and Control of RobotsSiferaw NegashNo ratings yet
- Design of Attitude and Path Tracking Controllers For Quad-Rotor Robots Using Reinforcement LearningDocument39 pagesDesign of Attitude and Path Tracking Controllers For Quad-Rotor Robots Using Reinforcement LearningMohdAriffananMohdBasriNo ratings yet
- Simulation and Modelling: Chapter ThreeDocument20 pagesSimulation and Modelling: Chapter ThreeLet’s Talk TechNo ratings yet
- Modeling and Simulation For Adaptive Control of Quadcopters: Me - 440 Major ProjectDocument31 pagesModeling and Simulation For Adaptive Control of Quadcopters: Me - 440 Major ProjectNikhil JayanthNo ratings yet
- Control of A Double Inverted Pendulum On ADocument12 pagesControl of A Double Inverted Pendulum On AJoseph CassarNo ratings yet
- Tasks, Semaphores and Message QueuesDocument47 pagesTasks, Semaphores and Message QueuesMohanNo ratings yet
- Report Tuan2 PendulumDocument23 pagesReport Tuan2 Pendulumtranduc20031611No ratings yet
- Slide 3 Wheel RobotDocument16 pagesSlide 3 Wheel Robotnguyenthebach.9hNo ratings yet
- Autonomous and Mobile Robotics: Prof. Giuseppe OrioloDocument16 pagesAutonomous and Mobile Robotics: Prof. Giuseppe OrioloaustinvishalNo ratings yet
- Cô NgaDocument4 pagesCô NgaTrần Nam sơnNo ratings yet
- Kinematcs DiagramDocument62 pagesKinematcs Diagrammmm100% (1)
- Control of An Unstable Inverted Pendulum SystemDocument11 pagesControl of An Unstable Inverted Pendulum SystemShivankyJaiswalNo ratings yet
- Present A Completed Control SystemDocument12 pagesPresent A Completed Control SystemTrườngg ThịnhhNo ratings yet
- Lecture 8 Robot Control StudentDocument52 pagesLecture 8 Robot Control StudentMustafa BüyükNo ratings yet
- Robot Dynamics: Q G Q Q Q C Q Q MDocument8 pagesRobot Dynamics: Q G Q Q Q C Q Q MadolfoclesNo ratings yet
- 3 WheelDocument27 pages3 WheelPhương LinhNo ratings yet
- EXP 03 - Kinematics of Cam MechanismsDocument9 pagesEXP 03 - Kinematics of Cam Mechanismsdtl.nnmNo ratings yet
- Chapter 2Document22 pagesChapter 2Yoyo tubeNo ratings yet
- DC ModelingDocument12 pagesDC ModelingdivinelightNo ratings yet
- A PID Backstepping Controller For Two WHDocument6 pagesA PID Backstepping Controller For Two WHTruong NguyenNo ratings yet
- Humanoid Arm Manipulation Using Binocular Vision: Project ReviewDocument42 pagesHumanoid Arm Manipulation Using Binocular Vision: Project ReviewLokesh KalyanarajNo ratings yet
- Informe Lab - 6y7-Diseño - PIDDocument6 pagesInforme Lab - 6y7-Diseño - PIDMiguel Angel Mamani MejiaNo ratings yet
- Lecture-2 Modeling of Mechanical SystemsDocument53 pagesLecture-2 Modeling of Mechanical SystemsOwais JafriNo ratings yet
- Emergency ControlDocument9 pagesEmergency ControlAndré Caetano MagalhãesNo ratings yet
- Live Modular Robots. DFKI Bremen 2009Document29 pagesLive Modular Robots. DFKI Bremen 2009Juan Gonzalez Gomez100% (2)
- 6 - Design Based On Transfer FunctionDocument66 pages6 - Design Based On Transfer FunctionJosueNo ratings yet
- Study On LQR Based Optimal Control Methods For Path TrackingDocument4 pagesStudy On LQR Based Optimal Control Methods For Path Trackingapi-643297699No ratings yet
- احمد شهاب مختبر سيطرةDocument12 pagesاحمد شهاب مختبر سيطرةMONEER THAMEERNo ratings yet
- Digital Control Engineering: ExampleDocument7 pagesDigital Control Engineering: Examplejin kazamaNo ratings yet
- Paper Inecce Published PDFDocument5 pagesPaper Inecce Published PDFVignesh RamakrishnanNo ratings yet
- File 1635576690 110340 Animation Procedures KinematicsDocument36 pagesFile 1635576690 110340 Animation Procedures Kinematicsdevansh gargNo ratings yet
- RoboticsDocument21 pagesRoboticsjiriraymond65No ratings yet
- MECH6091 - Poject1.Flight Control Systems - Qball Quadrotor HelicopterDocument28 pagesMECH6091 - Poject1.Flight Control Systems - Qball Quadrotor HelicopterOmar MalikNo ratings yet
- Position Control of Hybrid Stepper MotorDocument36 pagesPosition Control of Hybrid Stepper MotorAditya ChaudharyNo ratings yet
- Self Balancing Two Wheeled Robot ReportDocument11 pagesSelf Balancing Two Wheeled Robot Reportnetlvr0No ratings yet
- Quad CopterDocument10 pagesQuad CopterashoksanNo ratings yet
- Kinematik Dhe Dinamik PDFDocument43 pagesKinematik Dhe Dinamik PDFZaniNo ratings yet
- NI Tutorial 10703 enDocument7 pagesNI Tutorial 10703 enthulinh12a1No ratings yet
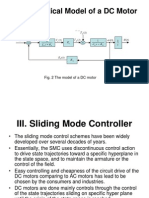
- Fig. 2 The Model of A DC MotorDocument10 pagesFig. 2 The Model of A DC MotorFatih SalihovicNo ratings yet
- Mathematical Model of Inverted Pendulum SystemDocument18 pagesMathematical Model of Inverted Pendulum SystemMajid Mehmood100% (1)
- Physics-Based Simulation: Graphics and Robotics: Chand T. JohnDocument26 pagesPhysics-Based Simulation: Graphics and Robotics: Chand T. JohnWaqas ZafarNo ratings yet
- Control Theory - AssignmentsDocument5 pagesControl Theory - AssignmentsAmar BeheraNo ratings yet
- Koi Sap 2009Document6 pagesKoi Sap 2009farhan beighNo ratings yet
- Control Strategies and Advanced RoboticsDocument10 pagesControl Strategies and Advanced Roboticsisaacokai20No ratings yet
- Computer Organization and ArchitectureDocument57 pagesComputer Organization and ArchitectureAjith Bobby RajagiriNo ratings yet
- Pid Loop ShapingDocument7 pagesPid Loop ShapingCAFECHINONo ratings yet
- Advanced Optimal Control SystemsDocument49 pagesAdvanced Optimal Control SystemsTsedenia TamiruNo ratings yet
- Regulation & Control Ppt-1Document55 pagesRegulation & Control Ppt-1tadiwosNo ratings yet
- Robotics Manohar Notes Unit 3,4 & 5Document19 pagesRobotics Manohar Notes Unit 3,4 & 5Johnson PaulNo ratings yet
- Short Questions, Attempt Any Three Questions (3 X 1.5 4.5)Document3 pagesShort Questions, Attempt Any Three Questions (3 X 1.5 4.5)PramodNo ratings yet
- Keyframe AnimationDocument30 pagesKeyframe AnimationNitika TomarNo ratings yet
- Dynamics and Control of A Robotic Arm HaDocument12 pagesDynamics and Control of A Robotic Arm HahiepphunglexNo ratings yet
- Chapter 6 - Manipulator DynamicsDocument26 pagesChapter 6 - Manipulator Dynamicstestmail916No ratings yet
- MLSC Lec12Document21 pagesMLSC Lec12khin muyar ayeNo ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Multiple Models Approach in Automation: Takagi-Sugeno Fuzzy SystemsFrom EverandMultiple Models Approach in Automation: Takagi-Sugeno Fuzzy SystemsNo ratings yet
- Unit 5 - PPTDocument15 pagesUnit 5 - PPTSusantoPaulNo ratings yet
- Usman Saleem Mufti Objective:: Electrical Engineer at Burraq Engineering Solutions March 2017 To ContinueDocument4 pagesUsman Saleem Mufti Objective:: Electrical Engineer at Burraq Engineering Solutions March 2017 To ContinueEngr Usman SaleemNo ratings yet
- Neelyog - Sales Presenter - 28022022 - Low ResDocument23 pagesNeelyog - Sales Presenter - 28022022 - Low ResrajNo ratings yet
- Lecture8 Generation With Limited Power SupplyDocument24 pagesLecture8 Generation With Limited Power SupplyvakulavenkataswarnaNo ratings yet
- ECEG 4123 Electrical Machines: Types of Synchronous MachinesDocument17 pagesECEG 4123 Electrical Machines: Types of Synchronous MachinesmebrahtenNo ratings yet
- Chapter 4Document25 pagesChapter 4Rutba SujanaNo ratings yet
- Data Sheet: Graphics Displays and Interface/adaptor CardsDocument8 pagesData Sheet: Graphics Displays and Interface/adaptor CardsSergey DNo ratings yet
- Fsa Lesson Plan-Kelly and AmeliaDocument5 pagesFsa Lesson Plan-Kelly and Ameliaapi-574938315No ratings yet
- DLL - Math-7 - CONVERSION OF UNITS OF MEASUREMENTDocument5 pagesDLL - Math-7 - CONVERSION OF UNITS OF MEASUREMENTBetsy Lambating-PesadoNo ratings yet
- CJ4 PTM REV1 1 Nov2017Document512 pagesCJ4 PTM REV1 1 Nov2017brian100% (3)
- Public Speaking-RevolveDocument11 pagesPublic Speaking-RevolveRoshadé's TvNo ratings yet
- Products Bus Superaerotown SpecDocument8 pagesProducts Bus Superaerotown SpecBKONo ratings yet
- 11/21/21 Mit ManipalDocument248 pages11/21/21 Mit ManipaltimothybijuvNo ratings yet
- Effects of Mastery Learning Strategy On Pupils' Mathematics Achievement in Asante Akim North DistrictDocument7 pagesEffects of Mastery Learning Strategy On Pupils' Mathematics Achievement in Asante Akim North DistrictInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Computer Science & Engineering: Branch: All Branches of B.TechDocument9 pagesComputer Science & Engineering: Branch: All Branches of B.TechBella HadidNo ratings yet
- Grade 11 Career Guidance ProgramDocument7 pagesGrade 11 Career Guidance ProgramSherilyn DiazNo ratings yet
- VOCABULARY - Starter Unit: © Oxford University PressDocument1 pageVOCABULARY - Starter Unit: © Oxford University PressMaria SolNo ratings yet
- Activity 4 Grade 9 Science Module 1Document2 pagesActivity 4 Grade 9 Science Module 1여자마비100% (1)
- NWS 2023 December NewsletterDocument14 pagesNWS 2023 December NewsletternationalwatercolorsocietyNo ratings yet
- PDF 24Document3 pagesPDF 24spacerays1No ratings yet
- Design Project PCD 2020 Chapters 1 To 5 With Calculations 1Document61 pagesDesign Project PCD 2020 Chapters 1 To 5 With Calculations 1Calvin BaraquiaNo ratings yet
- CalcIII PartialDerivatives SolutionsDocument37 pagesCalcIII PartialDerivatives SolutionslishaNo ratings yet
- User 'S Manual VS120Document44 pagesUser 'S Manual VS120cdsa1982No ratings yet
- Exercices Transistors Cor PDFDocument5 pagesExercices Transistors Cor PDFDaha AhmedNo ratings yet
- Terre Des Hommes SyllabusDocument7 pagesTerre Des Hommes SyllabusJun FlamingoNo ratings yet