You might also like
- CLSS Hydraulic Pump Section 2.2Document30 pagesCLSS Hydraulic Pump Section 2.2PHÁT NGUYỄN THẾ92% (13)
- Description From / To Instrument Tag # Signal Di Do Ai Ao Bus P&Id Raw Water Pumps Raw Water Pump P1260 MCCDocument1 pageDescription From / To Instrument Tag # Signal Di Do Ai Ao Bus P&Id Raw Water Pumps Raw Water Pump P1260 MCCbvdbNo ratings yet
- 2.2 CLSS PumpsDocument47 pages2.2 CLSS PumpsKevine Khaled100% (3)
- Trackmaster TMX Field Service Manual Part 2Document78 pagesTrackmaster TMX Field Service Manual Part 2macrufoNo ratings yet
- LS Compensating Valve PVFC: Tech NoteDocument4 pagesLS Compensating Valve PVFC: Tech NoteDeutsch themeNo ratings yet
- WLA2 - C& S Electric LimitedDocument4 pagesWLA2 - C& S Electric LimitedChirag SomaiyaNo ratings yet
- DagdogaDocument3 pagesDagdogashehab nabilNo ratings yet
- Pump Control PW200 220-7Document21 pagesPump Control PW200 220-7Teknik Makina100% (1)
- 3.9S Excavator - HydDocument85 pages3.9S Excavator - HydJorge Rojas100% (1)
- 520 L 0218Document4 pages520 L 0218ronald.1978No ratings yet
- Hydraulic SystemDocument29 pagesHydraulic SystemCaliche Guerra100% (1)
- RC Coupled AmplifierDocument8 pagesRC Coupled AmplifierAarushi Jain100% (1)
- Schmitt TriggerDocument4 pagesSchmitt TriggerHassan M KhanNo ratings yet
- STPDocument6 pagesSTPDennis ManabatNo ratings yet
- A11v0 eDocument32 pagesA11v0 eDhanraj PatilNo ratings yet
- Electric Utility ApplicationsDocument23 pagesElectric Utility Applicationssukhbat sodnomdorjNo ratings yet
- Chapter 2 Kim FDocument29 pagesChapter 2 Kim FMuhammad Sohaib ShahidNo ratings yet
- 2A 23V Synchronous Buck Converter: General DescriptionDocument15 pages2A 23V Synchronous Buck Converter: General DescriptionmoftahNo ratings yet
- General Description: 3A 27V Synchronous Buck ConverterDocument15 pagesGeneral Description: 3A 27V Synchronous Buck ConverterDario David DimaroNo ratings yet
- Snteng 6Document3 pagesSnteng 6ashkanr65No ratings yet
- Simple CC/CV Charger Using TPS54331: S.NikhilDocument6 pagesSimple CC/CV Charger Using TPS54331: S.NikhilDarshan KannurNo ratings yet
- TFT LCD DC-DC Converter With Integrated Charge Pumps, OP-AMP and HV-SwitchDocument20 pagesTFT LCD DC-DC Converter With Integrated Charge Pumps, OP-AMP and HV-SwitchАлександрNo ratings yet
- Description From / To Instrument Tag # Signal Di Do Ai Ao Bus P&Id Treated Water Pump P6220 MCCDocument1 pageDescription From / To Instrument Tag # Signal Di Do Ai Ao Bus P&Id Treated Water Pump P6220 MCCbvdbNo ratings yet
- Winding Temperature Monitoring On Transformer With OLTCDocument8 pagesWinding Temperature Monitoring On Transformer With OLTCPET MADAKKATHARANo ratings yet
- AN1484 Application Note: A 3.6 Watts Travel Adaptor Using Viper12ADocument11 pagesAN1484 Application Note: A 3.6 Watts Travel Adaptor Using Viper12Avetchboy100% (1)
- Linear Power SupplyDocument4 pagesLinear Power SupplyRagnar RagnarsonNo ratings yet
- M2.0 1460 100Document9 pagesM2.0 1460 100Coque de LunaNo ratings yet
- Microsoft PowerPoint - ECM660 III ADocument48 pagesMicrosoft PowerPoint - ECM660 III AJannie van Staden100% (1)
- Inverters PDFDocument90 pagesInverters PDFYasir HarafathNo ratings yet
- SK480-8LC ElectricDocument12 pagesSK480-8LC ElectricAgus RahmanNo ratings yet
- Variable Displacement Pump A11VO: For Open CircuitsDocument48 pagesVariable Displacement Pump A11VO: For Open Circuitsjose salvadorNo ratings yet
- Catu Daya Teregulasi: ElektronikaDocument20 pagesCatu Daya Teregulasi: ElektronikaIrfan AlfandyNo ratings yet
- K3VL Controls 2010 MDDocument55 pagesK3VL Controls 2010 MDHamza Lashin100% (1)
- PVN45Document4 pagesPVN45Andrey GyrychNo ratings yet
- Voltage Control PF ImprovementDocument11 pagesVoltage Control PF Improvementpradhansibasankar10No ratings yet
- Water LevelDocument1 pageWater Level2020DIPEE383 Miss.VAISHNAVI VITTHAL MALINo ratings yet
- AK Series Precautions (0.2MB)Document2 pagesAK Series Precautions (0.2MB)Trong Hung NguyenNo ratings yet
- Gauge Control Module Connector For Inputs and Outputs 8471Document3 pagesGauge Control Module Connector For Inputs and Outputs 8471ncapuccioNo ratings yet
- Chapter 7 - CMOS AmplifiersDocument40 pagesChapter 7 - CMOS AmplifiersAsyraf NorahairuzanNo ratings yet
- Class B Complementary Symmetry Power AmplifierDocument15 pagesClass B Complementary Symmetry Power AmplifierMuthukrishnan Vijayan VijayanNo ratings yet
- Description From / To Instrument Tag # Signal Di Do Ai Ao Bus P&Id Treated Water Pump P6230 MCCDocument1 pageDescription From / To Instrument Tag # Signal Di Do Ai Ao Bus P&Id Treated Water Pump P6230 MCCbvdbNo ratings yet
- Air chiller系统图 02Document1 pageAir chiller系统图 02Yang John (Rich-Tech1688)No ratings yet
- Description From/To Instrument Tag # Signal Didoaiaobusp&Id Sludge Water Pumps Sludge Water Pump P40310Document1 pageDescription From/To Instrument Tag # Signal Didoaiaobusp&Id Sludge Water Pumps Sludge Water Pump P40310bvdbNo ratings yet
- Analog & Digital Electronics: Course No: PH-218 Lec-4: Clampers, Voltage Multipliers, & Zener DiodeDocument15 pagesAnalog & Digital Electronics: Course No: PH-218 Lec-4: Clampers, Voltage Multipliers, & Zener DiodeRahulMondolNo ratings yet
- Opamp ApplicationDocument38 pagesOpamp ApplicationS.m. FerdousNo ratings yet
- Daily Monitoring Report Theodore Data CenterDocument3 pagesDaily Monitoring Report Theodore Data CenterPaul CansinoNo ratings yet
- Power Supply CircuitsDocument6 pagesPower Supply CircuitsJean GrandeNo ratings yet
- DX80R Control Valve 9SX14Document34 pagesDX80R Control Valve 9SX14ZawminhtunNo ratings yet
- Centrifugal CompressorsDocument68 pagesCentrifugal CompressorsVinay ChandwaniNo ratings yet
- Basic Pump System Drawing (Rev2)Document14 pagesBasic Pump System Drawing (Rev2)pkgarg_iitkgpNo ratings yet
- 2011 - ch04 Rangkaian DiodaDocument24 pages2011 - ch04 Rangkaian DiodaJohn JachsonNo ratings yet
- 0400H April 01, 2023Document3 pages0400H April 01, 2023Paul CansinoNo ratings yet
- Explanation of Hydraulic Circuit and Operations (Option)Document10 pagesExplanation of Hydraulic Circuit and Operations (Option)dhanysiregarNo ratings yet
- CHAP 2 - Diode Applications-Clippers ClampersDocument33 pagesCHAP 2 - Diode Applications-Clippers Clampersksreddy2002No ratings yet
- Wiring Diagram Panel Over FlowDocument13 pagesWiring Diagram Panel Over FlowAchmad FauziNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- FB LabDocument11 pagesFB Labmohdelias bin daudNo ratings yet
- Tim and CNT - Slide PresentationDocument21 pagesTim and CNT - Slide Presentationmohdelias bin daudNo ratings yet
- IEC61499 Application Model ISaGrafDocument3 pagesIEC61499 Application Model ISaGrafmohdelias bin daudNo ratings yet
- Directional Control ValvesDocument13 pagesDirectional Control ValvesShivam GargNo ratings yet
- Chapter 1 Overview of Hydraulics and Objective of The NotesDocument6 pagesChapter 1 Overview of Hydraulics and Objective of The Notesmohdelias bin daudNo ratings yet
- 1) About The Pandemic COVID-19Document2 pages1) About The Pandemic COVID-19محسين اشيكNo ratings yet
- The Necessary Art of PersuasionDocument14 pagesThe Necessary Art of PersuasionAnugragha SundarNo ratings yet
- Ssi-199-22 D Vikran Dolphin Rev.1Document2 pagesSsi-199-22 D Vikran Dolphin Rev.1ANGEL ANTONIO GUTIERREZ CONTRERASNo ratings yet
- AADE Review of Lost Circulation Materials and Treatments With An Updated ClassificationDocument9 pagesAADE Review of Lost Circulation Materials and Treatments With An Updated ClassificationMuhamad IrfanNo ratings yet
- Jazz - Installing LED DRLsDocument16 pagesJazz - Installing LED DRLsKrishnaNo ratings yet
- Abbreviations For O&G IndustryDocument38 pagesAbbreviations For O&G IndustryMike George MeyerNo ratings yet
- Intercostal Drainage and Its ManagementDocument36 pagesIntercostal Drainage and Its ManagementAnusha Verghese67% (3)
- Resume Pet A Sol LanderDocument3 pagesResume Pet A Sol LanderdreyesfinuliarNo ratings yet
- Os Unit-1Document33 pagesOs Unit-1yoichiisagi09No ratings yet
- Bio-Lubricant Production From Vegetable Oil and Animal Fat: International UniversityDocument52 pagesBio-Lubricant Production From Vegetable Oil and Animal Fat: International UniversityKiệtNguyễnNo ratings yet
- Ask NasaDocument68 pagesAsk Nasacavaco2008No ratings yet
- Lesson 2.4Document8 pagesLesson 2.4Tobi TobiasNo ratings yet
- AQAR-Report 2018-19 Tilak VidyapeethDocument120 pagesAQAR-Report 2018-19 Tilak VidyapeethAcross BordersNo ratings yet
- Ancient India: Book Recommendation: Indian Feudalism Urban Decay in India - RS SharmaDocument5 pagesAncient India: Book Recommendation: Indian Feudalism Urban Decay in India - RS SharmaShraddha 7No ratings yet
- Canadian Solar-Datasheet-All-Black CS6K-MS v5.57 ENDocument2 pagesCanadian Solar-Datasheet-All-Black CS6K-MS v5.57 ENParamesh KumarNo ratings yet
- Gulfpub Wo 201805Document81 pagesGulfpub Wo 201805Patricia.PNo ratings yet
- TSR 9294 DLA3 Dragons RestDocument78 pagesTSR 9294 DLA3 Dragons RestLéo Duarte100% (4)
- Introduction To Hydraulic System in The Construction Machinery - Copy ALIDocument2 pagesIntroduction To Hydraulic System in The Construction Machinery - Copy ALImahadNo ratings yet
- MP CRPDocument2 pagesMP CRPankutupanaNo ratings yet
- UST Corporation Law Syllabus 2020 2021Document26 pagesUST Corporation Law Syllabus 2020 2021PAMELA ALEXIA CASTILLONo ratings yet
- Gregorian-Lunar Calendar Conversion Table of 1960 (Geng-Zi - Year of The Mouse)Document1 pageGregorian-Lunar Calendar Conversion Table of 1960 (Geng-Zi - Year of The Mouse)Anomali SahamNo ratings yet
- Crowd Management - Model Course128Document117 pagesCrowd Management - Model Course128alonso_r100% (4)
- Sc10 - Worksheet On Atoms and IonsDocument6 pagesSc10 - Worksheet On Atoms and IonsAnmol AgarwalNo ratings yet
- Bilge Günsel TEL531E Detection and Estimation Theory W #1-2Document25 pagesBilge Günsel TEL531E Detection and Estimation Theory W #1-2ahmetNo ratings yet
- Etymological Wordplay in Ovid's Pyramus and ThisbeDocument5 pagesEtymological Wordplay in Ovid's Pyramus and Thisbeignoramus83No ratings yet
- Manual Safety Installation Operations Tescom en 123946Document23 pagesManual Safety Installation Operations Tescom en 123946Karikalan JayNo ratings yet
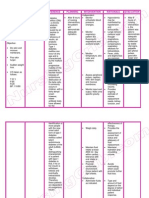
- Nursing Care Plan Diabetes Mellitus Type 1Document2 pagesNursing Care Plan Diabetes Mellitus Type 1deric85% (46)
- Quick-Guide M1M 20Document2 pagesQuick-Guide M1M 20KhaledNo ratings yet
- Critical Health Concerns in The 21st CenturyDocument4 pagesCritical Health Concerns in The 21st CenturykelleybrawnNo ratings yet
- Emergency Floatation Helicoptero PDFDocument14 pagesEmergency Floatation Helicoptero PDFterrywhizardhotmail.com The Best Of The Best.No ratings yet