You might also like
- Electromagnetic Lab Write-UpDocument5 pagesElectromagnetic Lab Write-Upapi-375748727No ratings yet
- 9A02503 Control SystemsDocument4 pages9A02503 Control SystemssivabharathamurthyNo ratings yet
- A Portable Multi-Band End-Fed Half Wave (EFHW) Antenna For 40-10mDocument4 pagesA Portable Multi-Band End-Fed Half Wave (EFHW) Antenna For 40-10mratata ratataNo ratings yet
- Transformer Factory Tests - TESLA INSTITUTE PDFDocument54 pagesTransformer Factory Tests - TESLA INSTITUTE PDFEngr Imtiaz Hussain Gilani100% (1)
- Materials Science and Technology of Optical FabricationFrom EverandMaterials Science and Technology of Optical FabricationNo ratings yet
- Mathematical and Computational Modeling: With Applications in Natural and Social Sciences, Engineering, and the ArtsFrom EverandMathematical and Computational Modeling: With Applications in Natural and Social Sciences, Engineering, and the ArtsRoderick MelnikNo ratings yet
- Trip Circuit Supervision Relay Spec 0604Document5 pagesTrip Circuit Supervision Relay Spec 0604Sameera ChamingaNo ratings yet
- P&H 4100XPC Operating SpecificationDocument4 pagesP&H 4100XPC Operating SpecificationDaniel ZHNo ratings yet
- CS Previous Question PapersDocument48 pagesCS Previous Question PapersShaleva SinghNo ratings yet
- r05220205 Control SystemsDocument9 pagesr05220205 Control SystemsandhracollegesNo ratings yet
- Code No: 35051Document8 pagesCode No: 35051SRINIVASA RAO GANTANo ratings yet
- JNTU Old Question Papers 2007Document7 pagesJNTU Old Question Papers 2007Srinivasa Rao GNo ratings yet
- Nr220405-Control SystemsDocument8 pagesNr220405-Control SystemsSRINIVASA RAO GANTANo ratings yet
- rr420201 Digital Control SystemsDocument8 pagesrr420201 Digital Control SystemsSRINIVASA RAO GANTANo ratings yet
- r07220205 Control SystemsDocument9 pagesr07220205 Control SystemsandhracollegesNo ratings yet
- Digital Control Systems May 2007 Question PaperDocument8 pagesDigital Control Systems May 2007 Question Paperelimelek100% (3)
- The LNM Institute of Information Technology Ece and Cce ECE 321: Control System Engineering (End-Term Examination)Document17 pagesThe LNM Institute of Information Technology Ece and Cce ECE 321: Control System Engineering (End-Term Examination)Kunal ChamoliNo ratings yet
- Thapathali Campus: Subject:-Control SystemDocument2 pagesThapathali Campus: Subject:-Control Systemjagat bhusalNo ratings yet
- March 2022Document2 pagesMarch 2022Narmada BheemaNo ratings yet
- rr420201 Digital Control SystemsDocument8 pagesrr420201 Digital Control SystemsSrinivasa Rao GNo ratings yet
- Ra5220205 Control SystemsDocument2 pagesRa5220205 Control SystemsSingam SridharNo ratings yet
- r05220403 Switching Theory and Logic DesignDocument8 pagesr05220403 Switching Theory and Logic DesignSRINIVASA RAO GANTANo ratings yet
- Ee 14402Document2 pagesEe 14402vivanNo ratings yet
- Question Paper Code:: (10×2 20 Marks)Document4 pagesQuestion Paper Code:: (10×2 20 Marks)MohamedNo ratings yet
- r05322201 Digital and Optimal Control SystemsDocument8 pagesr05322201 Digital and Optimal Control SystemsSRINIVASA RAO GANTANo ratings yet
- 06 ESm 43 MQDocument6 pages06 ESm 43 MQGuruprasadNo ratings yet
- Ee2253 - Control Systems April-May 2010Document3 pagesEe2253 - Control Systems April-May 2010durgabalNo ratings yet
- Control System Question PaperDocument2 pagesControl System Question PaperKishor GooddayNo ratings yet
- PTEE7301 April-2021Document2 pagesPTEE7301 April-2021imman46920No ratings yet
- AE61Document4 pagesAE61Anima SenNo ratings yet
- Cs April 2011Document8 pagesCs April 201129viswa12No ratings yet
- Question Paper Code:: Reg. No.Document3 pagesQuestion Paper Code:: Reg. No.HARI DURAINo ratings yet
- EC409 Control SystemsDocument12 pagesEC409 Control SystemsSuryakanta PattanaikNo ratings yet
- April - 2018-19Document3 pagesApril - 2018-19SaikumarNo ratings yet
- 510Document8 pages510chenumallaNo ratings yet
- WWW - Manaresults.Co - In: Define Stability. What Is Routh Stability Criterion?Document2 pagesWWW - Manaresults.Co - In: Define Stability. What Is Routh Stability Criterion?mushahedNo ratings yet
- Computer GraphicsDocument6 pagesComputer GraphicsPradeep KumarNo ratings yet
- rr320201 Analysis of Linear SystemsDocument11 pagesrr320201 Analysis of Linear SystemsSRINIVASA RAO GANTANo ratings yet
- R7220402 Control SystemsDocument2 pagesR7220402 Control SystemssivabharathamurthyNo ratings yet
- Control Systems April 2019Document8 pagesControl Systems April 2019Department of Electronics and Communication Engineering AKNUNo ratings yet
- Rajneesh Yadav - Untitleddesign - Original PDFDocument4 pagesRajneesh Yadav - Untitleddesign - Original PDFsantvan jagtapNo ratings yet
- 15es4gccst PDFDocument3 pages15es4gccst PDFkoushik bhatNo ratings yet
- Question Paper Code:: Reg. No.Document3 pagesQuestion Paper Code:: Reg. No.rfdggfyhrtyb gfhjh tjNo ratings yet
- Question Paper Code:: Reg. No.Document3 pagesQuestion Paper Code:: Reg. No.HOD ECE KNCETNo ratings yet
- Nr-220206 Control SystemsDocument8 pagesNr-220206 Control SystemsSrinivasa Rao G100% (1)
- Nov Dec 2016Document4 pagesNov Dec 2016Shubham KaklijNo ratings yet
- CS Dec 15Document3 pagesCS Dec 15SAURABH BHISENo ratings yet
- Dec. EC409-C - Ktu QbankDocument3 pagesDec. EC409-C - Ktu QbankNISHANT KUMARNo ratings yet
- Answer Any Two Full Questions, Each Carries 15 MarksDocument3 pagesAnswer Any Two Full Questions, Each Carries 15 MarksOlNo ratings yet
- r05221201 Computer GraphicsDocument5 pagesr05221201 Computer Graphicslibrarian_abitNo ratings yet
- 115 Ad 032016Document2 pages115 Ad 032016SANKARA REDDYNo ratings yet
- Answer Any Two Full Questions, Each Carries 15 MarksDocument3 pagesAnswer Any Two Full Questions, Each Carries 15 MarkskayyurNo ratings yet
- Question Paper Code:: Reg. No.Document3 pagesQuestion Paper Code:: Reg. No.VinayNo ratings yet
- RR420201-DIGITAL-CONTROL-SYSTEMS June2007Document8 pagesRR420201-DIGITAL-CONTROL-SYSTEMS June2007singnamonivinaykumarNo ratings yet
- Computer - Graphics 2005 SDocument5 pagesComputer - Graphics 2005 SVardhani DhulipudiNo ratings yet
- 125 Du 112017Document3 pages125 Du 112017SANKARA REDDYNo ratings yet
- Attainable Region Theory: An Introduction to Choosing an Optimal ReactorFrom EverandAttainable Region Theory: An Introduction to Choosing an Optimal ReactorNo ratings yet
- Digital Electronics 2: Sequential and Arithmetic Logic CircuitsFrom EverandDigital Electronics 2: Sequential and Arithmetic Logic CircuitsRating: 5 out of 5 stars5/5 (1)
- Robust Adaptive Control for Fractional-Order Systems with Disturbance and SaturationFrom EverandRobust Adaptive Control for Fractional-Order Systems with Disturbance and SaturationNo ratings yet
- Characteristic Modes: Theory and Applications in Antenna EngineeringFrom EverandCharacteristic Modes: Theory and Applications in Antenna EngineeringNo ratings yet
- Computational Liquid Crystal Photonics: Fundamentals, Modelling and ApplicationsFrom EverandComputational Liquid Crystal Photonics: Fundamentals, Modelling and ApplicationsNo ratings yet
- r05320403 Microwave EngineeringDocument8 pagesr05320403 Microwave EngineeringSrinivasa Rao G100% (2)
- r05320305 Design of Machine Members IIDocument11 pagesr05320305 Design of Machine Members IISrinivasa Rao G100% (4)
- r5 402 Mba Management of Technology Set1Document1 pager5 402 Mba Management of Technology Set1Srinivasa Rao G100% (1)
- Switch Gear and ProtectionDocument6 pagesSwitch Gear and Protectionrajaniram100% (1)
- r5 401 Mba Strategic Management Set1Document1 pager5 401 Mba Strategic Management Set1Srinivasa Rao G100% (3)
- 43-Mca-Or-Design and Analysis of AlgorithmDocument1 page43-Mca-Or-Design and Analysis of AlgorithmSrinivasa Rao GNo ratings yet
- 42 Mca NR Programming in JavaDocument1 page42 Mca NR Programming in JavaSrinivasa Rao GNo ratings yet
- r5 401 Mba Strategic Management Set1Document1 pager5 401 Mba Strategic Management Set1Srinivasa Rao G100% (3)
- 43-Mca-Or-Design and Analysis of AlgorithmDocument1 page43-Mca-Or-Design and Analysis of AlgorithmSrinivasa Rao GNo ratings yet
- r6 43 Mca Data Warehousing and Mining Set1Document1 pager6 43 Mca Data Warehousing and Mining Set1Srinivasa Rao GNo ratings yet
- 41 Mca NR Software EngineeringDocument1 page41 Mca NR Software EngineeringSrinivasa Rao G100% (2)
- NR 49 Mca Design PatternsDocument1 pageNR 49 Mca Design PatternsSrinivasa Rao GNo ratings yet
- NR 302 Mba Cost and Management Accounting Set1Document1 pageNR 302 Mba Cost and Management Accounting Set1Srinivasa Rao GNo ratings yet
- NR 48 Mca Data Warehousing and MiningDocument1 pageNR 48 Mca Data Warehousing and MiningSrinivasa Rao GNo ratings yet
- Or 46 Mca Distributed DatabasesDocument1 pageOr 46 Mca Distributed DatabasesSrinivasa Rao GNo ratings yet
- Nr-35-Mca-Design and Analysis of AlgorithmDocument2 pagesNr-35-Mca-Design and Analysis of AlgorithmSrinivasa Rao G100% (1)
- Advanced Unix ProgrammingDocument2 pagesAdvanced Unix ProgrammingSrinivasa Rao GNo ratings yet
- Power Electronics NotesDocument2 pagesPower Electronics Notesprasad357No ratings yet
- UNIT 1aaDocument164 pagesUNIT 1aaDr.K.Krishna Veni ProfessorNo ratings yet
- Distance Protection For Transmission Lines: Part 1: Power Transmission and DistributionDocument12 pagesDistance Protection For Transmission Lines: Part 1: Power Transmission and Distributionkjan8899No ratings yet
- Town and Country Planning LETTERDocument2 pagesTown and Country Planning LETTERRonish ChandraNo ratings yet
- Automatic Transfer Switch ATS022: Doc. No. 1SDH000760R0002 - L8884Document43 pagesAutomatic Transfer Switch ATS022: Doc. No. 1SDH000760R0002 - L8884gealifeNo ratings yet
- SC Ak960Document202 pagesSC Ak960angel quintero100% (1)
- Recent Trends in Electric TractionDocument2 pagesRecent Trends in Electric TractionSubhraJyotiBorahNo ratings yet
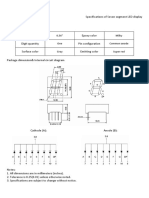
- 0.56" Milky Anode RedDocument2 pages0.56" Milky Anode RedPutinun TachavatapornNo ratings yet
- PD-2.9-WT - WT.01-B-A-EN Product Description (MM92 50Hz 2050kW)Document27 pagesPD-2.9-WT - WT.01-B-A-EN Product Description (MM92 50Hz 2050kW)iuliamovNo ratings yet
- PST 2200 Power System Simulator LaboratoryDocument28 pagesPST 2200 Power System Simulator LaboratoryAbraham AlemNo ratings yet
- Havells Industrial Cable Price List July 2013Document6 pagesHavells Industrial Cable Price List July 2013Cpgeorge JohnNo ratings yet
- Geo S8Document4 pagesGeo S8Attiya SariNo ratings yet
- FCAWDocument4 pagesFCAWRamanujadaasanNo ratings yet
- Tape Mobil JVC.Document16 pagesTape Mobil JVC.EdisonNainggolanNo ratings yet
- BCD To Seven SegmentDocument4 pagesBCD To Seven SegmentHari PrasadNo ratings yet
- Electrical Sciences EEE F111Document64 pagesElectrical Sciences EEE F111KAUSTUBHNo ratings yet
- Module-2: Single Phase Ac Circuits & Three Phase Ac CircuitsDocument75 pagesModule-2: Single Phase Ac Circuits & Three Phase Ac CircuitsKUMARNo ratings yet
- J. Electrochem. Soc.-2017-Darling-E3081-91Document11 pagesJ. Electrochem. Soc.-2017-Darling-E3081-91Geovanny JaenzNo ratings yet
- Mdn3 NMB MatDocument1 pageMdn3 NMB MatJahn HarryNo ratings yet
- Alesis 3630 Compressor Manual PDFDocument31 pagesAlesis 3630 Compressor Manual PDFRobert HarrisonNo ratings yet
- Cascode AmplifierDocument6 pagesCascode AmplifierGp Gonzales0% (1)
- LP12-200 - LP SERIES - VRLA AGM Battery - Multi-Purpose Series.4b23d6Document2 pagesLP12-200 - LP SERIES - VRLA AGM Battery - Multi-Purpose Series.4b23d6Uros DrazicNo ratings yet
- Esdm IrdtDocument259 pagesEsdm Irdtvijay_786No ratings yet
- Phy213 CH29 Worksheet-KeyDocument5 pagesPhy213 CH29 Worksheet-KeynjparNo ratings yet
- Chang 2019Document9 pagesChang 2019Miguel Angel Cama IriarteNo ratings yet