You might also like
- 1D Spring/Truss Elements: MCEN 4173/5173Document32 pages1D Spring/Truss Elements: MCEN 4173/5173Sahil KhanNo ratings yet
- Test Bank for Precalculus: Functions & GraphsFrom EverandTest Bank for Precalculus: Functions & GraphsRating: 5 out of 5 stars5/5 (1)
- Problem: Analyze The Behavior of The System Composed of The Two Springs Loaded by External Forces As Shown AboveDocument11 pagesProblem: Analyze The Behavior of The System Composed of The Two Springs Loaded by External Forces As Shown AboveC V CHANDRASHEKARANo ratings yet
- Ten-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesFrom EverandTen-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesNo ratings yet
- SpringsDocument11 pagesSpringsfaikbesterNo ratings yet
- Application of Derivatives Tangents and Normals (Calculus) Mathematics E-Book For Public ExamsFrom EverandApplication of Derivatives Tangents and Normals (Calculus) Mathematics E-Book For Public ExamsRating: 5 out of 5 stars5/5 (1)
- 2D and 3D Truss Elements: MCEN 4173/5173Document19 pages2D and 3D Truss Elements: MCEN 4173/5173Khalid F AbdulraheemNo ratings yet
- Lecture 2: The Direct Stiffness Method: 2.1 Definition of The Stiffness Matrix. First Look at Structural ProblemsDocument19 pagesLecture 2: The Direct Stiffness Method: 2.1 Definition of The Stiffness Matrix. First Look at Structural ProblemsNiyazi CanNo ratings yet
- Factoring and Algebra - A Selection of Classic Mathematical Articles Containing Examples and Exercises on the Subject of Algebra (Mathematics Series)From EverandFactoring and Algebra - A Selection of Classic Mathematical Articles Containing Examples and Exercises on the Subject of Algebra (Mathematics Series)No ratings yet
- Springs (Compatibility Mode)Document41 pagesSprings (Compatibility Mode)Omair Aziz RabbaniNo ratings yet
- Element Assembly11Document21 pagesElement Assembly11Zaid HadiNo ratings yet
- 2 - Stiffness Method - Analysis of A System of SpringsDocument21 pages2 - Stiffness Method - Analysis of A System of SpringsdhgrfrhkwuibfwdlrxNo ratings yet
- Quadrapole - Parmisse DURRANI-2006Document36 pagesQuadrapole - Parmisse DURRANI-2006parmisd84No ratings yet
- Ifem051 w3Document24 pagesIfem051 w3derick0320No ratings yet
- MEEM 3700 Mechanical VibrationsDocument8 pagesMEEM 3700 Mechanical VibrationsJohn Larry CorpuzNo ratings yet
- Solution Manual For Open Channel Hydraulics - Osman AkanDocument7 pagesSolution Manual For Open Channel Hydraulics - Osman AkanLINA GINED GONZALEZ MUNOZ100% (3)
- Mechanics of Solids Week 13 LecturesDocument8 pagesMechanics of Solids Week 13 LecturesFlynn GouldNo ratings yet
- Lecture Notes ELE353 Chap2-4 Spr14Document6 pagesLecture Notes ELE353 Chap2-4 Spr14George Nicholas RahwanNo ratings yet
- Lecture 2: One Dimensional Problems: APL705 Finite Element MethodDocument5 pagesLecture 2: One Dimensional Problems: APL705 Finite Element MethodZafar AlamNo ratings yet
- Beam Elements: MCEN 4173/5173Document28 pagesBeam Elements: MCEN 4173/5173Santhosh LingappaNo ratings yet
- Topic 7 Self Assessment I Partial Differentiation. 1. Find All First and Second Order Partial Derivatives of The Following FunctionsDocument15 pagesTopic 7 Self Assessment I Partial Differentiation. 1. Find All First and Second Order Partial Derivatives of The Following FunctionsTNo ratings yet
- Discussion Problems and Solutions 6: 1 Section 3.2Document2 pagesDiscussion Problems and Solutions 6: 1 Section 3.2Myd FaimNo ratings yet
- Advanced Engineering Mathematics Solutions (2-4 2-7&2-10)Document26 pagesAdvanced Engineering Mathematics Solutions (2-4 2-7&2-10)Fa VelizNo ratings yet
- Project 5Document13 pagesProject 5Niamat UllahNo ratings yet
- Inverted Pendulum 1Document21 pagesInverted Pendulum 1ricardoxcmNo ratings yet
- EECE 301 Discussion 05 - Fourier Series ExamplesDocument8 pagesEECE 301 Discussion 05 - Fourier Series ExampleskakarlaHNo ratings yet
- Solutions To Problem Set 1 Physics 201b January 13, 2010Document8 pagesSolutions To Problem Set 1 Physics 201b January 13, 2010serkansancakNo ratings yet
- 2010 01 12 3DBeam CDT6Document65 pages2010 01 12 3DBeam CDT6r1c4rd0f3rNo ratings yet
- E y y y Y: TEST 2-Answer Scheme (10 % Coursework)Document4 pagesE y y y Y: TEST 2-Answer Scheme (10 % Coursework)Jimmy TeowNo ratings yet
- LECT02 - 2DOF Spring Mass Systems (Compatibility Mode)Document25 pagesLECT02 - 2DOF Spring Mass Systems (Compatibility Mode)zinilNo ratings yet
- Not Not Not: Linear Homogeneous EquationsDocument17 pagesNot Not Not: Linear Homogeneous EquationsfisikaNo ratings yet
- Response of MDOF SystemsDocument28 pagesResponse of MDOF SystemsSalvador SilveyraNo ratings yet
- Modal AnalysisDocument40 pagesModal AnalysisSumit Thakur100% (1)
- FormulasDocument2 pagesFormulasJoe Crash CrashNo ratings yet
- CH 2 Stiffness Method 09Document22 pagesCH 2 Stiffness Method 09Syahrianto Saputra100% (1)
- 2007 Ajc h2 Prelims Paper 1 SolutionsDocument9 pages2007 Ajc h2 Prelims Paper 1 Solutionsvincesee85No ratings yet
- Ch5 - Response of MDOF Systems PDFDocument37 pagesCh5 - Response of MDOF Systems PDFRicky AriyantoNo ratings yet
- Homework 4: Benjamin StahlDocument9 pagesHomework 4: Benjamin StahlReza AhmedNo ratings yet
- 4 Node QuadDocument7 pages4 Node QuadSachin KudteNo ratings yet
- Sumation SummaryDocument12 pagesSumation SummaryCélj Filmund GamayNo ratings yet
- CHAP2Document45 pagesCHAP2黃聖傑No ratings yet
- MST209 2005solutionsDocument6 pagesMST209 2005solutionsrashismart2000No ratings yet
- (A305) Otomatik Kontrol Ders Notu (Slayt)Document27 pages(A305) Otomatik Kontrol Ders Notu (Slayt)Mücahit Ezel100% (1)
- Advanced Structure: University of Technology Building & Construction Dept. Structural Engineering BranchDocument20 pagesAdvanced Structure: University of Technology Building & Construction Dept. Structural Engineering Branchsamir_ssh7151No ratings yet
- Estabilidad Interna y Entrada-Salida de Sistemas Continuos: Udec - DieDocument10 pagesEstabilidad Interna y Entrada-Salida de Sistemas Continuos: Udec - DieagustinpinochetNo ratings yet
- DTSP Extc May 2009 10Document7 pagesDTSP Extc May 2009 10Natasha AgarwalNo ratings yet
- Problem Set 1 - BersaloteDocument1 pageProblem Set 1 - BersaloteJOHN PATRICK BERSALOTENo ratings yet
- Static Economy Functional FormDocument5 pagesStatic Economy Functional Formbobo411No ratings yet
- 2014 H2 Maths Prelim Papers - NJC P1 SolutionDocument13 pages2014 H2 Maths Prelim Papers - NJC P1 Solutioncherylhzy0% (4)
- MatematicasDocument9 pagesMatematicasYoel Lopez MejiasNo ratings yet
- Solutions To Selected Questions From Assignment 2: T M J T M Z Z JDocument5 pagesSolutions To Selected Questions From Assignment 2: T M J T M Z Z JDoug Shi-DongNo ratings yet
- Dynamics Tutorial 14-Natural Vibrations-One Degree of Freedom-27p PDFDocument13 pagesDynamics Tutorial 14-Natural Vibrations-One Degree of Freedom-27p PDFmanfredm6435No ratings yet
- Method of ImagesDocument11 pagesMethod of ImagesratansrikanthNo ratings yet
- Moving Coil GalvonometerDocument27 pagesMoving Coil GalvonometerSani SweetuNo ratings yet
- Lesson 12 - Derivative of Inverse Trigonometric FunctionsDocument12 pagesLesson 12 - Derivative of Inverse Trigonometric FunctionsAlexander PiniliNo ratings yet
- Lecture 8Document13 pagesLecture 8Prakash KancharlaNo ratings yet
- Chpt05-FEM For 2D SolidsnewDocument56 pagesChpt05-FEM For 2D SolidsnewKrishna MyakalaNo ratings yet
- Aieee Model Paper-1-Solutions Physics: 1 E=w+ mv 2 hc = w + E λ hc = w + 2E λ 2Document12 pagesAieee Model Paper-1-Solutions Physics: 1 E=w+ mv 2 hc = w + E λ hc = w + 2E λ 2sanagavarapuNo ratings yet
- Introduction To RETDocument80 pagesIntroduction To RETPatyNo ratings yet
- Theory of Applied Robotics - Kinematics, Dynamics, and Control (2nd Edition) - Reza N. Jazar - 9781441917492 - AmazonDocument7 pagesTheory of Applied Robotics - Kinematics, Dynamics, and Control (2nd Edition) - Reza N. Jazar - 9781441917492 - AmazonKhalid F AbdulraheemNo ratings yet
- CH 02Document32 pagesCH 02jmartinezmo100% (1)
- Module7 PDFDocument76 pagesModule7 PDFMuhammad AgungNo ratings yet
- CH 02Document99 pagesCH 02Manuel Gagno75% (8)
- 10-40565 - IJAER-IEEE Ok 42287-42292 PDFDocument6 pages10-40565 - IJAER-IEEE Ok 42287-42292 PDFKhalid F AbdulraheemNo ratings yet
- A Review of Dynamic Models Used in Simulation of Gear TransmissionsDocument10 pagesA Review of Dynamic Models Used in Simulation of Gear TransmissionsKhalid F AbdulraheemNo ratings yet
- Bearing Fault Diagnostics ANN and Laplace 3 (Clear) PDFDocument17 pagesBearing Fault Diagnostics ANN and Laplace 3 (Clear) PDFKhalid F AbdulraheemNo ratings yet
- Gears in ProeDocument13 pagesGears in ProeHector OliverNo ratings yet
- Chap 08Document45 pagesChap 08Khalid F AbdulraheemNo ratings yet
- Chap 02Document17 pagesChap 02Khalid F AbdulraheemNo ratings yet
- Heat Transfer and Temperature Field: MCEN 4173/5173Document15 pagesHeat Transfer and Temperature Field: MCEN 4173/5173Khalid F AbdulraheemNo ratings yet
- Finite Element AnalysisDocument25 pagesFinite Element AnalysisAnonymous lV8E5mEONo ratings yet
- MATLAB Tutorial PDFDocument49 pagesMATLAB Tutorial PDFGovind GauravNo ratings yet
- Int J Adv Manuf Technol-KhalidDocument10 pagesInt J Adv Manuf Technol-KhalidKhalid F AbdulraheemNo ratings yet
- Engineering Vibration, 2nd Edition PDFDocument322 pagesEngineering Vibration, 2nd Edition PDFKhalid F Abdulraheem100% (1)
- Rolling Element Bearing Fault Diagnostics Using Laplace Wavelet KurtosisDocument9 pagesRolling Element Bearing Fault Diagnostics Using Laplace Wavelet KurtosisKhalid F AbdulraheemNo ratings yet
- Pde Slides Numerical LaplaceDocument9 pagesPde Slides Numerical LaplaceKhalid F AbdulraheemNo ratings yet
- 1 PBDocument13 pages1 PBGustavo ValdebenitoNo ratings yet
- Effect of Vibration After Filling On Mechanical Reliability in Thin Wall Investment Casting With Fillability Filling Regime-Part 1zDocument10 pagesEffect of Vibration After Filling On Mechanical Reliability in Thin Wall Investment Casting With Fillability Filling Regime-Part 1zKhalid F AbdulraheemNo ratings yet
- Fault Diagnosis in Gear Using Wavelet Envelope Power SpectrumDocument12 pagesFault Diagnosis in Gear Using Wavelet Envelope Power SpectrumKhalid F AbdulraheemNo ratings yet
- Full Text ThesisDocument226 pagesFull Text ThesisKhalid F AbdulraheemNo ratings yet
- Introduction To Finite Element Analysis Using SolidWorks by Randy H. ShihDocument22 pagesIntroduction To Finite Element Analysis Using SolidWorks by Randy H. Shihhombre.muerto595957% (7)
- Introduction To Finite Element Analysis Using Solidworks Simulation 2012Document9 pagesIntroduction To Finite Element Analysis Using Solidworks Simulation 2012Khalid F AbdulraheemNo ratings yet
- Analysis of Machine Elements: Using Solidworks Simulation 2011Document45 pagesAnalysis of Machine Elements: Using Solidworks Simulation 2011Aparna Duggirala50% (2)
- Application of Lapalce Wavelet Kurtosis For Gear Fault DetectionDocument8 pagesApplication of Lapalce Wavelet Kurtosis For Gear Fault DetectionKhalid F AbdulraheemNo ratings yet
- Automatic Cutting Tool Fault DetectionDocument19 pagesAutomatic Cutting Tool Fault DetectionKhalid F AbdulraheemNo ratings yet
- Acoustic Signatures of Gear Defects Using Time-Frequency Analyses and A Test RigDocument22 pagesAcoustic Signatures of Gear Defects Using Time-Frequency Analyses and A Test RigKhalid F AbdulraheemNo ratings yet
- Numerical Methods-Ma1251Document13 pagesNumerical Methods-Ma1251naveencsmepco100% (1)
- 03numerical IntegrationDocument13 pages03numerical IntegrationNorhawa IzaniNo ratings yet
- Reteach: Factoring PolynomialsDocument4 pagesReteach: Factoring PolynomialsAteeq RehmanNo ratings yet
- FEA BasicsDocument43 pagesFEA Basicsmayuresh_6767No ratings yet
- Eigenvectors-Wolfram Mathematica 9 Documentation PDFDocument6 pagesEigenvectors-Wolfram Mathematica 9 Documentation PDFMahfudz ShodiqNo ratings yet
- Key Words and Phrases. Inverse Heat Conduction Problem, Fundamental Solution MethodDocument21 pagesKey Words and Phrases. Inverse Heat Conduction Problem, Fundamental Solution MethodFahad AlmafakirNo ratings yet
- Maths Unit 1Document14 pagesMaths Unit 1Shubham SharmaNo ratings yet
- Iscse 2011 Proceedings Final-KusadasıDocument1,417 pagesIscse 2011 Proceedings Final-Kusadasıinvisible25No ratings yet
- Graeffe Root-Squaring MethodDocument5 pagesGraeffe Root-Squaring MethodRania sulaiman100% (1)
- Sem I 2020-2021 Software Quiz (Chapters 2, 3 5)Document5 pagesSem I 2020-2021 Software Quiz (Chapters 2, 3 5)Syahema SalehNo ratings yet
- A Tutorial On NIMROD Physics Kernel Code DevelopmentDocument64 pagesA Tutorial On NIMROD Physics Kernel Code DevelopmentAles NecasNo ratings yet
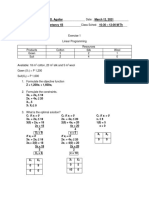
- AEC4 - Aguilar, Hayna Marie - BSA1B - Exercise1Document3 pagesAEC4 - Aguilar, Hayna Marie - BSA1B - Exercise1Hayna Marie AguilarNo ratings yet
- 07a1bs09 Numerical MethodsDocument8 pages07a1bs09 Numerical MethodsSRINIVASA RAO GANTANo ratings yet
- Jurnal - Daftar Jurnal Terindex ScopusDocument4 pagesJurnal - Daftar Jurnal Terindex ScopusHashifah AnisahNo ratings yet
- Assignment III MATLAB CODEDocument12 pagesAssignment III MATLAB CODEAlfredo IllescasNo ratings yet
- Introduction To The Stiffness (Displacement) Method: Analysis of A System of SpringsDocument43 pagesIntroduction To The Stiffness (Displacement) Method: Analysis of A System of SpringsmmgaribayNo ratings yet
- A Class of Continuous Linear Multistep Method For Solving Second Order Ordinary Differential EquationsDocument9 pagesA Class of Continuous Linear Multistep Method For Solving Second Order Ordinary Differential EquationsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Unit 1 Chapter 7 Answers PDFDocument9 pagesUnit 1 Chapter 7 Answers PDFEggBread12No ratings yet
- Ma ZEDocument1 pageMa ZEShawn MikeNo ratings yet
- BibliografiaDocument3 pagesBibliografiaIgnacio LopezNo ratings yet
- Interpolation: Dr. Gokul K. CDocument14 pagesInterpolation: Dr. Gokul K. CAmar MandalNo ratings yet
- 22 MATM11 Set 2Document4 pages22 MATM11 Set 2Yaseer AshrafNo ratings yet
- Binomial Theorem-03 - ExerciseDocument16 pagesBinomial Theorem-03 - ExerciseRaju SinghNo ratings yet
- An Introduction To Numerical Analysisfor Computational Fluid MechanicsDocument123 pagesAn Introduction To Numerical Analysisfor Computational Fluid MechanicsHiten ParmarNo ratings yet
- Ebook Engineering Mathematics For Semesters Iii and Iv PDF Full Chapter PDFDocument67 pagesEbook Engineering Mathematics For Semesters Iii and Iv PDF Full Chapter PDFmichael.dye870100% (28)
- Bairstow Method1Document8 pagesBairstow Method1M.Y M.ANo ratings yet
- #Lecture 1 - Introduction To Soil Modelling and Numerical MethodsDocument45 pages#Lecture 1 - Introduction To Soil Modelling and Numerical MethodsafvilavilanoriegaNo ratings yet
- 4C04MATDocument1 page4C04MATCiby AbrahamNo ratings yet
- Math 10 Summative Test 1-20Document4 pagesMath 10 Summative Test 1-20Ma Cecilia Cabios-NacionalesNo ratings yet
- ContinuousPiecewiseLinearFit PDFDocument7 pagesContinuousPiecewiseLinearFit PDFRubens OliveiraNo ratings yet