You might also like
- Design of A Non-Ideal Buck ConverterDocument13 pagesDesign of A Non-Ideal Buck ConverterJames Xgun100% (1)
- Ecee Colorado Edu Copec Book Slides Ch1slide PDFDocument35 pagesEcee Colorado Edu Copec Book Slides Ch1slide PDFVikram BorawakeNo ratings yet
- Fundamentals of Power Electronics: Robert W. Erickson University of Colorado, BoulderDocument35 pagesFundamentals of Power Electronics: Robert W. Erickson University of Colorado, BoulderMohammed AL-MaaitahNo ratings yet
- Chapter 9. Controller Design: 9.2. Effect of Negative Feedback On The Network Transfer FunctionsDocument74 pagesChapter 9. Controller Design: 9.2. Effect of Negative Feedback On The Network Transfer Functionsbojan 2No ratings yet
- Input Filter Design by EricksonDocument49 pagesInput Filter Design by EricksonshrikrisNo ratings yet
- Fundamentals of Power Electronics: Robert W. Erickson University of Colorado, BoulderDocument35 pagesFundamentals of Power Electronics: Robert W. Erickson University of Colorado, BoulderAhmedoNo ratings yet
- Aula6 - ConversoresDocument26 pagesAula6 - ConversoreslucianoNo ratings yet
- Topology Review DC DC ConvertersDocument54 pagesTopology Review DC DC ConvertersaknuslNo ratings yet
- Chapter 8. Converter Transfer Functions: 8.1. Review of Bode PlotsDocument103 pagesChapter 8. Converter Transfer Functions: 8.1. Review of Bode Plotsbojan 2No ratings yet
- Chapter 15 Transformer DesignDocument14 pagesChapter 15 Transformer Designkaren dejoNo ratings yet
- CH 2 SlideDocument45 pagesCH 2 Slidemukesh00007No ratings yet
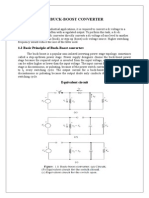
- Buck Boost ReportDocument10 pagesBuck Boost ReportKarThiNo ratings yet
- Sill Analog Digital ConverterDocument77 pagesSill Analog Digital Converternicinha_No ratings yet
- CH 15 SlidesDocument40 pagesCH 15 SlidesAkhileshkumar PandeyNo ratings yet
- PID Buck-BoostDocument8 pagesPID Buck-BoostIvan RahmanNo ratings yet
- Input Filter Design For SMPSDocument21 pagesInput Filter Design For SMPSsenkum812002No ratings yet
- DC DC ConvertersDocument26 pagesDC DC ConvertersJuan Francisco ValenzuelaNo ratings yet
- Switch Mode ConvertersDocument28 pagesSwitch Mode ConvertersHemantha KumarNo ratings yet
- Switch Mode ConvertersDocument28 pagesSwitch Mode ConvertersAniruddh KashyapNo ratings yet
- Digital Filter Design For Analogue EngineersDocument15 pagesDigital Filter Design For Analogue EngineersVinicius FigueiredoNo ratings yet
- El T I III Electronics III: - Power Dissipation in CMOS Digital Circuits - Optimization of Chain of InvertersDocument23 pagesEl T I III Electronics III: - Power Dissipation in CMOS Digital Circuits - Optimization of Chain of InvertersSaied Aly SalamahNo ratings yet
- Chap 2 Erickson Fundamentals of Power Electronics PDFDocument45 pagesChap 2 Erickson Fundamentals of Power Electronics PDFhenrypatriciomunoz1No ratings yet
- Erickson Slides DC-DC CCMDocument45 pagesErickson Slides DC-DC CCMAlberto Valenzuela OrtizNo ratings yet
- Principles of Steady-State Converter AnalysisDocument45 pagesPrinciples of Steady-State Converter AnalysisTrung Hiếu ETNo ratings yet
- Asymmetric Half Bridge (AHB) Converters - by FairchildDocument19 pagesAsymmetric Half Bridge (AHB) Converters - by FairchildahsansadaqatNo ratings yet
- Aula Conversores CC-CC BásicosDocument44 pagesAula Conversores CC-CC BásicosVirgílio TávoraNo ratings yet
- Improved Power Quality AC-DC Converters With High Frequency Transformer IsolationDocument69 pagesImproved Power Quality AC-DC Converters With High Frequency Transformer IsolationZlatian RaduNo ratings yet
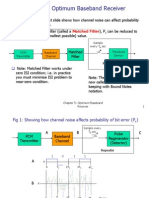
- Chapter 5 Optimum Baseband ReceiverDocument16 pagesChapter 5 Optimum Baseband ReceiverMohamed Fahmy100% (1)
- Designing DC-DC Converters Based On ZETA TopologyDocument8 pagesDesigning DC-DC Converters Based On ZETA TopologyMayeth MacedaNo ratings yet
- LLec15 Thermistor ADC PDFDocument6 pagesLLec15 Thermistor ADC PDFNguyễn Thị Tài LinhNo ratings yet
- DAC1020Document14 pagesDAC1020micochangoNo ratings yet
- Ac Lab CompleteDocument50 pagesAc Lab CompletePraveen ChittiNo ratings yet
- Power Converters LabDocument53 pagesPower Converters LabK Kiran VishnuNo ratings yet
- 7Document17 pages7DrÖzkan Ahmed AtarNo ratings yet
- Homework Assignment #1 Basic Converter Analysis Due at 10 Am MDT On Friday, September 7, 2017Document3 pagesHomework Assignment #1 Basic Converter Analysis Due at 10 Am MDT On Friday, September 7, 2017ollata kalanoNo ratings yet
- Amplifier Frequency ResponseDocument33 pagesAmplifier Frequency ResponseHidayah HadiNo ratings yet
- PNP General Purpose Amplifier: Absolute Maximum RatingsDocument10 pagesPNP General Purpose Amplifier: Absolute Maximum Ratingsmike_helplineNo ratings yet
- Rabaey Chapter5Document78 pagesRabaey Chapter5Vijay Kumar TNo ratings yet
- Improved Design of Three-Level NPC Inverters in Comparison To Two-Level InvertersDocument10 pagesImproved Design of Three-Level NPC Inverters in Comparison To Two-Level InvertersEdamEdamNo ratings yet
- Vlsi Design & TechnolgyDocument60 pagesVlsi Design & TechnolgyDimple GalaNo ratings yet
- CH 3 SlideDocument33 pagesCH 3 SlideDenis EmilioNo ratings yet
- 06ESL37 Analog Electronics Lab MANUALDocument71 pages06ESL37 Analog Electronics Lab MANUALsunilsathishNo ratings yet
- Tda 2030 ADocument14 pagesTda 2030 ATetelodukaNo ratings yet
- Bt21ece102 Dmlab Assignment-01Document21 pagesBt21ece102 Dmlab Assignment-01S075 Abhishek DeshmukhNo ratings yet
- Design of Rogowski Coil With IntegratorDocument32 pagesDesign of Rogowski Coil With Integratorourbobby100% (1)
- Hoja de Datos Del TDA 7439Document20 pagesHoja de Datos Del TDA 7439_el_patriarca_No ratings yet
- Euler's PathDocument10 pagesEuler's PathSatish Kumar0% (1)
- EE42 100 Wb-Lecture19 080713-FDocument37 pagesEE42 100 Wb-Lecture19 080713-FozanistzNo ratings yet
- AND8026/D Solving EMI and ESD Problems With Integrated Passive Device Low Pass Pi FiltersDocument16 pagesAND8026/D Solving EMI and ESD Problems With Integrated Passive Device Low Pass Pi FiltersAtakan OzturKNo ratings yet
- The Discontinuous Conduction ModeDocument37 pagesThe Discontinuous Conduction ModeEdson JuniorNo ratings yet
- Boost ConverterDocument10 pagesBoost ConverterCaio CezarNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Analog Circuit Design Volume 2: Immersion in the Black Art of Analog DesignFrom EverandAnalog Circuit Design Volume 2: Immersion in the Black Art of Analog DesignNo ratings yet
- Analog Circuit Design: A Tutorial Guide to Applications and SolutionsFrom EverandAnalog Circuit Design: A Tutorial Guide to Applications and SolutionsRating: 3.5 out of 5 stars3.5/5 (6)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Audio IC Projects: A Collection of Useful Circuits Based on Readily Available ChipsFrom EverandAudio IC Projects: A Collection of Useful Circuits Based on Readily Available ChipsNo ratings yet