You might also like
- Banner Tables Views FormsDocument844 pagesBanner Tables Views FormsmandaisbestNo ratings yet
- Software EngineeringDocument120 pagesSoftware EngineeringPardeep VatsNo ratings yet
- IIR FilterDocument61 pagesIIR FilterMuhammad Muinul Islam100% (1)
- Scope CreepDocument15 pagesScope CreepNivithaNo ratings yet
- Multiple Choices Question1Document4 pagesMultiple Choices Question1vishnugehlot0% (2)
- SOPC Implementation of Software-Defined Radio: First PrizeDocument16 pagesSOPC Implementation of Software-Defined Radio: First PrizenanostallmannNo ratings yet
- Ficient Mapping of CORDIC Algorithm For OFDM-Based WLANDocument11 pagesFicient Mapping of CORDIC Algorithm For OFDM-Based WLANvyshaqgNo ratings yet
- Lecture 2fuzzy LogicDocument30 pagesLecture 2fuzzy LogicPRODYOT SINHANo ratings yet
- Precision Robotic Displacement Using FPGA: Aswathy Surendran.P, V.Saminathan, M.UdhayakumarDocument4 pagesPrecision Robotic Displacement Using FPGA: Aswathy Surendran.P, V.Saminathan, M.UdhayakumarerpublicationNo ratings yet
- Rijndael SBoxDocument16 pagesRijndael SBoxPrashant SinghNo ratings yet
- EC3352 Digital System DesignDocument22 pagesEC3352 Digital System DesignParanthaman GNo ratings yet
- DD and COmodule 2Document97 pagesDD and COmodule 2Madhura N KNo ratings yet
- Pertemuan 9 - Different Equation and Digital FilteringDocument21 pagesPertemuan 9 - Different Equation and Digital FilteringIca Khoerunnisa Allysa BalqisNo ratings yet
- 2D TransformationDocument34 pages2D TransformationRajNo ratings yet
- Unit-1: 2D and 3D Transformation & ViewingDocument34 pagesUnit-1: 2D and 3D Transformation & Viewingvishwajeet patilNo ratings yet
- Didital FiltersDocument65 pagesDidital FiltersDr.EZHILARASI PNo ratings yet
- Unit 1 3transformationsDocument42 pagesUnit 1 3transformationsAkhilprasad SadigeNo ratings yet
- Chapter 4 Combinational LogicDocument42 pagesChapter 4 Combinational LogicBrijesha RaoNo ratings yet
- Lab 10Document15 pagesLab 10Jaya Chandra ManchalaNo ratings yet
- DSP Test Ii: Figure 2a An LCR FilterDocument5 pagesDSP Test Ii: Figure 2a An LCR FilterfidematNo ratings yet
- 3F3 6 Design of IIR FiltersDocument44 pages3F3 6 Design of IIR FiltersAkanksha GargNo ratings yet
- Boosted MLIDocument8 pagesBoosted MLIAjmal FarooqNo ratings yet
- DSPAA NotesDocument42 pagesDSPAA NotesKushagra SharmaNo ratings yet
- Graphics and Multimedia: Unit 1 2D PrimitivesDocument36 pagesGraphics and Multimedia: Unit 1 2D Primitivesvidi87No ratings yet
- 1.discuss The Frequency Domain Techniques of Image Enhancement in DetailDocument19 pages1.discuss The Frequency Domain Techniques of Image Enhancement in DetailsubbuNo ratings yet
- Chapter 4 Combinational LogicDocument54 pagesChapter 4 Combinational LogicAkrur NeupaneNo ratings yet
- Chapter 4 - Register Transfer and Microoperations Section 4.1 - Register Transfer LanguageDocument14 pagesChapter 4 - Register Transfer and Microoperations Section 4.1 - Register Transfer LanguageRobiul IslamNo ratings yet
- VHDL Implementation For A Fuzzy Logic Controller: August 2006Document9 pagesVHDL Implementation For A Fuzzy Logic Controller: August 2006wigaYeHtetNo ratings yet
- IES CONV Electronic Comm. 2000Document11 pagesIES CONV Electronic Comm. 2000gateandiesNo ratings yet
- 1.discuss The Frequency Domain Techniques of Image Enhancement in DetailDocument19 pages1.discuss The Frequency Domain Techniques of Image Enhancement in DetailSandeep KishoreNo ratings yet
- Learning 2004 1 019Document6 pagesLearning 2004 1 019tasos_rex3139No ratings yet
- CG Question BankDocument17 pagesCG Question BankAnonymous DFpzhrRNo ratings yet
- PrasadDocument11 pagesPrasadchandujontyNo ratings yet
- Robust, Noniterative, and Computationally Efficient Modification of Van Cittert Deconvolution Optical FiguringDocument13 pagesRobust, Noniterative, and Computationally Efficient Modification of Van Cittert Deconvolution Optical FiguringAftab KhanNo ratings yet
- Fuzzy Logic Controlled Closed Loop Buck Converter: Deepak Kumar Nayak, Arjuna Muduli and Gatram Panchajanya KumarDocument7 pagesFuzzy Logic Controlled Closed Loop Buck Converter: Deepak Kumar Nayak, Arjuna Muduli and Gatram Panchajanya KumarDeepak Kumar NayakNo ratings yet
- Chapter 4 Combinational LogicDocument54 pagesChapter 4 Combinational LogicKaran RegmiNo ratings yet
- Mario Kiessling, Syed Aon MujtabaDocument5 pagesMario Kiessling, Syed Aon MujtabaIram ArshadNo ratings yet
- Low-Pass Filter Control Memory HeadphoneDocument6 pagesLow-Pass Filter Control Memory HeadphonematanveerNo ratings yet
- Unit 1 Topic 1-Computer Architecture-A En-UsDocument98 pagesUnit 1 Topic 1-Computer Architecture-A En-UsBrían Josué Escalante MartínezNo ratings yet
- 4 IIR Filter Design by YBP 22-09-2014Document69 pages4 IIR Filter Design by YBP 22-09-2014Pramiti ParasharNo ratings yet
- Vco15 10 PDFDocument14 pagesVco15 10 PDFsebastian nasiNo ratings yet
- Design, Simulation and Implementation of An Adaptive Controller On Base of Artificial Neural Networks For A Resonant DC-DC ConverterDocument4 pagesDesign, Simulation and Implementation of An Adaptive Controller On Base of Artificial Neural Networks For A Resonant DC-DC Converterbacuoc.nguyen356No ratings yet
- THD Reduction Using Selective Harmonic Method For Cascaded H-Bridge Converters With Equal DC Link VoltagesDocument9 pagesTHD Reduction Using Selective Harmonic Method For Cascaded H-Bridge Converters With Equal DC Link VoltagesHesham AliNo ratings yet
- Radial Basis Function Networks: The Structure of The RBF NetworksDocument8 pagesRadial Basis Function Networks: The Structure of The RBF NetworksMaryam FarisNo ratings yet
- Pattern Shifting With Different Frequencies - ReportDocument19 pagesPattern Shifting With Different Frequencies - ReportChristopher EarnshawNo ratings yet
- Digital Linear and Nonlinear Controllers For Buck Converter: Shyama M, P.SwaminathanDocument7 pagesDigital Linear and Nonlinear Controllers For Buck Converter: Shyama M, P.SwaminathanFABIANCHO2210No ratings yet
- CS1354 - Graphics and Mutimedia Important Two MarksDocument17 pagesCS1354 - Graphics and Mutimedia Important Two MarksSumathi BasNo ratings yet
- Three-Level Inverter Performance Using Adaptive Neuro-Fuzzy Based Space Vector ModulationDocument14 pagesThree-Level Inverter Performance Using Adaptive Neuro-Fuzzy Based Space Vector ModulationiisteNo ratings yet
- Incremental Reduction of Binary Decision DiagramsDocument7 pagesIncremental Reduction of Binary Decision DiagramsabismaalNo ratings yet
- Question BankDocument43 pagesQuestion BankDhilip PrabakaranNo ratings yet
- Reconfigurablecomputing: Euclidean Distance Based SortingDocument27 pagesReconfigurablecomputing: Euclidean Distance Based SortingSANCHIT KULKARNINo ratings yet
- CEIC3006 Lab 2 ReportDocument18 pagesCEIC3006 Lab 2 ReportAdzamNo ratings yet
- 1.1 BackgroundDocument50 pages1.1 BackgroundSupriyo SrimaniNo ratings yet
- Solution of Guessing Paper 2018 PDFDocument17 pagesSolution of Guessing Paper 2018 PDFVidyasagar AcademyNo ratings yet
- A Study About Fpga-Based Digital Filters: Javier Valls Marcos M. Peiró Trini Sansaloni Eduardo BoemoDocument10 pagesA Study About Fpga-Based Digital Filters: Javier Valls Marcos M. Peiró Trini Sansaloni Eduardo BoemoShafiullaShaikNo ratings yet
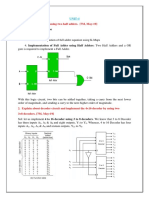
- Design A Full Adder by Using Two Half Adders. (7M, May-19)Document10 pagesDesign A Full Adder by Using Two Half Adders. (7M, May-19)Sri Silpa Padmanabhuni100% (1)
- Arijit Nath - Bode PlotDocument6 pagesArijit Nath - Bode PlotTry meNo ratings yet
- Lab BookDocument70 pagesLab Bookअमरेश झाNo ratings yet
- DDDC87ECAA084E5DA4D2D77F7DC80391Document5 pagesDDDC87ECAA084E5DA4D2D77F7DC80391Sameer NandagaveNo ratings yet
- e-ISSN: 2320-0847 p-ISSN: 2320-0936 Volume-02, Issue-12, pp-75-82Document8 pagese-ISSN: 2320-0847 p-ISSN: 2320-0936 Volume-02, Issue-12, pp-75-82AJER JOURNALNo ratings yet
- Bilinear Interpolation: Enhancing Image Resolution and Clarity through Bilinear InterpolationFrom EverandBilinear Interpolation: Enhancing Image Resolution and Clarity through Bilinear InterpolationNo ratings yet
- Some Case Studies on Signal, Audio and Image Processing Using MatlabFrom EverandSome Case Studies on Signal, Audio and Image Processing Using MatlabNo ratings yet
- It Ot ConvergenceDocument54 pagesIt Ot ConvergencerogerioNo ratings yet
- Jukka Hallikas Digitalizing Procurement The Impact ofDocument18 pagesJukka Hallikas Digitalizing Procurement The Impact ofalexsmithalex931No ratings yet
- Win13 Aspen PlusDocument2 pagesWin13 Aspen Plusalireza198No ratings yet
- Strategic Planning of Information SystemsDocument14 pagesStrategic Planning of Information SystemslalitbadheNo ratings yet
- Khanzadi 2018 Lean Design Management Using A GamiDocument11 pagesKhanzadi 2018 Lean Design Management Using A GamiKaa TranNo ratings yet
- Process Control ProblemsDocument4 pagesProcess Control ProblemsMarco SarmientoNo ratings yet
- Principles of Linear Systems and Signals B P Lathi PDFDocument140 pagesPrinciples of Linear Systems and Signals B P Lathi PDFVipin GuptaNo ratings yet
- Analyzing The Deliverables Produced in The SDLCDocument5 pagesAnalyzing The Deliverables Produced in The SDLCkjheiinNo ratings yet
- Group # 7: Kalman Filter Based Parameter EstimationDocument11 pagesGroup # 7: Kalman Filter Based Parameter Estimationsameerfarooq420840No ratings yet
- Ooad Unit IDocument37 pagesOoad Unit IGeetha ReddyNo ratings yet
- PID Algorithm: Fully ExplainedDocument79 pagesPID Algorithm: Fully ExplainedShad ArshiyaNo ratings yet
- LQG - LTR Controller Design Quanser Rotary Inverted PendulumDocument6 pagesLQG - LTR Controller Design Quanser Rotary Inverted PendulumGeovani BondoNo ratings yet
- Fiziks: Second Law of Thermodynamics and EntropyDocument34 pagesFiziks: Second Law of Thermodynamics and EntropySURAJ PRATAP SINGHNo ratings yet
- Wooten Paper1Document9 pagesWooten Paper1api-526395450No ratings yet
- Second Law of Thermodynamics in Isochoric ProcessDocument2 pagesSecond Law of Thermodynamics in Isochoric ProcessJohn PaulNo ratings yet
- 10 - 1 PID ControllersDocument36 pages10 - 1 PID ControllersShilpya KurniasihNo ratings yet
- First Conference On Foundations of Information Science: From Computers and Quantum Physics To Cells, Nervous Systems, and SocietiesDocument10 pagesFirst Conference On Foundations of Information Science: From Computers and Quantum Physics To Cells, Nervous Systems, and Societiessepot24093No ratings yet
- Clase 1 - Thermodynamic OverviewDocument21 pagesClase 1 - Thermodynamic OverviewAlex Marin JimenezNo ratings yet
- Phase Two Software Quality Assurance Plan: 1. PurposeDocument4 pagesPhase Two Software Quality Assurance Plan: 1. PurposeAB GammerNo ratings yet
- Exams98 09Document29 pagesExams98 09salimNo ratings yet
- Module 2: Modeling Discrete Time Systems by Pulse Transfer FunctionDocument4 pagesModule 2: Modeling Discrete Time Systems by Pulse Transfer FunctionamritNo ratings yet
- No Adjuntar - Workshop 2020Document76 pagesNo Adjuntar - Workshop 2020yurifernandodmNo ratings yet
- How The Foxboro 43AP Pneumatic Controller Works Learning Instrumentation and Control EngineeringDocument2 pagesHow The Foxboro 43AP Pneumatic Controller Works Learning Instrumentation and Control EngineeringNGASSAKI ATONGUI Christ HubertNo ratings yet
- EEE 363 Control Systems: Course Teacher: Md. Shamsul Arifin Assistant Professor Dept. of EEE, CUETDocument19 pagesEEE 363 Control Systems: Course Teacher: Md. Shamsul Arifin Assistant Professor Dept. of EEE, CUETRakayet RafiNo ratings yet
- Sliding Mode ControlDocument16 pagesSliding Mode ControlHoang Ngoc HungNo ratings yet
- Terminology On Urban Ecology - DouglasDocument3 pagesTerminology On Urban Ecology - DouglasRuchi SinglaNo ratings yet