You might also like
- AC Circuits Module 1Document28 pagesAC Circuits Module 1YoNo ratings yet
- Sequencial Trippng of Steam Turbine Generators PDFDocument10 pagesSequencial Trippng of Steam Turbine Generators PDFAnonymous BBX2E87aH100% (1)
- Unit-1 - DC & AC Circuits PDFDocument60 pagesUnit-1 - DC & AC Circuits PDFSaravanan T Y100% (5)
- IEEE and IEC Harmonic LimitsDocument8 pagesIEEE and IEC Harmonic LimitsSenthil KumarNo ratings yet
- Voltage StabilityDocument27 pagesVoltage StabilityDevendra SharmaNo ratings yet
- Analysis of AC CircuitsDocument49 pagesAnalysis of AC CircuitsScrappy WellNo ratings yet
- Technical Help: Ecodial Advance Calculation 4.2Document44 pagesTechnical Help: Ecodial Advance Calculation 4.2mumi87No ratings yet
- AC Circuit Analysis FundamentalsDocument34 pagesAC Circuit Analysis Fundamentalsmeseret sisayNo ratings yet
- Alternating Voltage WaveformDocument20 pagesAlternating Voltage Waveformwaqar ahmed khokharNo ratings yet
- Publication 7 9424 628Document69 pagesPublication 7 9424 628Mary Angel YongcoNo ratings yet
- CH1 Introduction مصافيDocument7 pagesCH1 Introduction مصافيHasan AliNo ratings yet
- General Format For The Sinusoidal Voltage or CurrentDocument25 pagesGeneral Format For The Sinusoidal Voltage or CurrentGabriel Carl AlpuertoNo ratings yet
- Chapter5 Part 3 Sinusoidal Current and VoltageDocument46 pagesChapter5 Part 3 Sinusoidal Current and VoltageJOHN BRYNDON LANDICHONo ratings yet
- CH3 LecDocument12 pagesCH3 LecAbdla DoskiNo ratings yet
- Chapter 10 Sinusoidal Voltages and CurrentsDocument40 pagesChapter 10 Sinusoidal Voltages and CurrentsAeron James V. Basilio100% (1)
- EEE 212 - Applied Electricity 2Document78 pagesEEE 212 - Applied Electricity 2noumsi briceNo ratings yet
- Advantages of Purely Sinusoidal WaveformDocument5 pagesAdvantages of Purely Sinusoidal WaveformsurajNo ratings yet
- Chapter 6 Single Phase AC TheoryDocument6 pagesChapter 6 Single Phase AC TheoryJACOB MUDONHINo ratings yet
- Ac Circuits Handout and TutorialsDocument32 pagesAc Circuits Handout and TutorialsyaseenVision100% (1)
- Alternating voltages and currents and AC valuesDocument35 pagesAlternating voltages and currents and AC valuesUtkarsh ShuklaNo ratings yet
- Module 3.13 AC Theory: What Is Alternating Current (AC) ?Document53 pagesModule 3.13 AC Theory: What Is Alternating Current (AC) ?Bakri ZaaboubaNo ratings yet
- Masini Electrice Curs IndiaDocument137 pagesMasini Electrice Curs Indiaarness22No ratings yet
- Basic Electrical NotesDocument58 pagesBasic Electrical NotesKamal Joshi100% (2)
- Experiment No. 1 Sine Wave For Single Loop Generator: ObjectiveDocument5 pagesExperiment No. 1 Sine Wave For Single Loop Generator: ObjectiveAnam MugheesNo ratings yet
- Generate Sinusoidal Waveforms Using Electromagnetic InductionDocument10 pagesGenerate Sinusoidal Waveforms Using Electromagnetic InductionrodinooNo ratings yet
- ELECTROMAGNETIC INDUCTION BASICSDocument4 pagesELECTROMAGNETIC INDUCTION BASICSMahesh AbnaveNo ratings yet
- Ch-1 Fundamentals of Alternating Voltage & CurrentDocument25 pagesCh-1 Fundamentals of Alternating Voltage & CurrenttrojansujitNo ratings yet
- Elktron 1Document16 pagesElktron 1Vhiannn ANo ratings yet
- Presentation 1Document66 pagesPresentation 1Vaneet GuptaNo ratings yet
- Lessons1 in Electric CircuitsDocument20 pagesLessons1 in Electric Circuitsjorge046No ratings yet
- Ac Fundamentals-NewDocument13 pagesAc Fundamentals-Newlarra100% (2)
- Basic Electrical Engineering (BEEE101L) : Presented byDocument23 pagesBasic Electrical Engineering (BEEE101L) : Presented byAsh wanth100% (1)
- Fundamentals of Electric Circuits: Sinusoidal Sources and The Concept of Phasor in Circuit AnalysisDocument20 pagesFundamentals of Electric Circuits: Sinusoidal Sources and The Concept of Phasor in Circuit AnalysisJames BejareNo ratings yet
- Sinusoidal Waveform or Sine Wave in An AC Circuit PDFDocument16 pagesSinusoidal Waveform or Sine Wave in An AC Circuit PDFshahanbashaNo ratings yet
- Cse-I-Basic Electricals Engg. L3 PDFDocument52 pagesCse-I-Basic Electricals Engg. L3 PDFDeeksha NaiduNo ratings yet
- Ohm's Law & Kirchhoff's LawsDocument18 pagesOhm's Law & Kirchhoff's LawsAkhilNo ratings yet
- AC FundamentalsDocument21 pagesAC FundamentalsSheikh RaselNo ratings yet
- EEE 101 CH6: Ac Circuits and MeasurementsDocument30 pagesEEE 101 CH6: Ac Circuits and MeasurementsSERHAT YILDIRIMNo ratings yet
- Sinusoidal Waveform or Sine Wave in An AC Circuit PDFDocument16 pagesSinusoidal Waveform or Sine Wave in An AC Circuit PDFDemudu DonkaNo ratings yet
- Mod 3 Book 3 Ac TheoryDocument92 pagesMod 3 Book 3 Ac Theoryranjit prasadNo ratings yet
- Chapter 13 - Sinusoidal Alternating Waveforms: Introductory Circuit Analysis Robert L. BoylestadDocument31 pagesChapter 13 - Sinusoidal Alternating Waveforms: Introductory Circuit Analysis Robert L. BoylestadSajjad Hossain ShuvoNo ratings yet
- Single phase AC circuits overviewDocument58 pagesSingle phase AC circuits overviewchandrakanth0% (1)
- Interpret AC Voltages & CurrentsDocument46 pagesInterpret AC Voltages & CurrentsKelvin LooiNo ratings yet
- AC CircuitDocument210 pagesAC CircuitRagilNo ratings yet
- Fundamentals of Electrical Engineering Chapter ThreeDocument24 pagesFundamentals of Electrical Engineering Chapter Threetemesgen adugnaNo ratings yet
- Rinciples OF Lectric IrcuitsDocument42 pagesRinciples OF Lectric IrcuitsMahesh ThilakasiriNo ratings yet
- AC FundamentalsDocument7 pagesAC FundamentalsJayrMenesNo ratings yet
- Rotating Magnetic FieldDocument9 pagesRotating Magnetic FieldSyeda Maira ZiaNo ratings yet
- BEE Unit-IIDocument29 pagesBEE Unit-IIharishcheeeNo ratings yet
- EENG 352 Lec1 To 4Document62 pagesEENG 352 Lec1 To 4teresawamboi72No ratings yet
- Theory of Circuits PhasorsDocument13 pagesTheory of Circuits PhasorsAlper KoçerNo ratings yet
- Basic AC Theory Handout 01-Mec. EngDocument10 pagesBasic AC Theory Handout 01-Mec. EngParamananda_SurangaNo ratings yet
- Chapter 4 Ac Circuit TheoryDocument7 pagesChapter 4 Ac Circuit TheoryFilbert OmbongiNo ratings yet
- What Is Alternating CurrentDocument49 pagesWhat Is Alternating CurrentRajeev ValunjkarNo ratings yet
- Ch1 AC CurrentDocument23 pagesCh1 AC CurrentAhmed ElayanNo ratings yet
- Concept of A. C. CircuitsDocument11 pagesConcept of A. C. CircuitsAbhishekNo ratings yet
- 03.ac Theory PDFDocument88 pages03.ac Theory PDFAvinashGurugubelliNo ratings yet
- Chapter 1: Fundamentals of Rotating Ac MachinesDocument5 pagesChapter 1: Fundamentals of Rotating Ac MachinesJules KouamNo ratings yet
- theory midDocument15 pagestheory midSantosNo ratings yet
- Unit 4Document51 pagesUnit 4karnatisharathNo ratings yet
- CT1 Unit 2Document29 pagesCT1 Unit 2Ali khan7No ratings yet
- AC Phase Waveforms Lagging Leading Angles Delta Connections Transformer PartsDocument10 pagesAC Phase Waveforms Lagging Leading Angles Delta Connections Transformer PartsKunal SakharkarNo ratings yet
- AC Waveform Theory and Characteristics in 40 CharactersDocument45 pagesAC Waveform Theory and Characteristics in 40 CharactersreddyloginNo ratings yet
- Method of ImagesDocument12 pagesMethod of Imagesatul206No ratings yet
- Transient Waves On Transmission LinesDocument21 pagesTransient Waves On Transmission Linesatul206No ratings yet
- Electroquasistatic and Magnetoquasistatic Fields and Boundary ConditionsDocument13 pagesElectroquasistatic and Magnetoquasistatic Fields and Boundary Conditionsatul206No ratings yet
- Electroquasistatic ForcesDocument10 pagesElectroquasistatic Forcesatul206No ratings yet
- E LearningDocument8 pagesE Learningatul206No ratings yet
- MTU 1 ST YEAR SYLLABUSDocument80 pagesMTU 1 ST YEAR SYLLABUSaditya7195488No ratings yet
- Harmonics 1Document3 pagesHarmonics 1atul206No ratings yet
- File AxdDocument8 pagesFile Axdatul206No ratings yet
- Economic Models - Doe - Markal-Macro ModelDocument8 pagesEconomic Models - Doe - Markal-Macro Modelatul206No ratings yet
- FACTS White Paper FinalDocument5 pagesFACTS White Paper FinalbaratatontaNo ratings yet
- Harmonics 1Document3 pagesHarmonics 1atul206No ratings yet
- Experiment 7Document3 pagesExperiment 7atul206No ratings yet
- Sequence ImpedenceDocument4 pagesSequence ImpedenceAnonymous m65TTcfOTNo ratings yet
- EEE SyllabusDocument24 pagesEEE SyllabusBright1xNo ratings yet
- PLC PF CorrectrDocument22 pagesPLC PF CorrectrAbhishek Mani50% (2)
- EASTRON SMART X96-RC User ManualDocument30 pagesEASTRON SMART X96-RC User ManualÁlvaroAnabalónSalamancaNo ratings yet
- Brosura - Relee Vamp - 2012 (En)Document16 pagesBrosura - Relee Vamp - 2012 (En)Cata CatalinNo ratings yet
- Capacitor VPTDocument7 pagesCapacitor VPTsomjit_mohanty3326No ratings yet
- MSBTE Third Semester Applied Mathematics Subject SchemeDocument40 pagesMSBTE Third Semester Applied Mathematics Subject SchemeHarshal Vaidya100% (1)
- Static Synchronous Compensators (STATCOM) : A Review: B. Singh R. Saha A. Chandra K. Al-HaddadDocument28 pagesStatic Synchronous Compensators (STATCOM) : A Review: B. Singh R. Saha A. Chandra K. Al-HaddadDavid Ofosu AmoatengNo ratings yet
- API - Tr100+ Manaul1Document65 pagesAPI - Tr100+ Manaul1Melchor DavidNo ratings yet
- TonerDocument5 pagesTonershuaibyesNo ratings yet
- AC Circuit AnalysisDocument4 pagesAC Circuit AnalysisShroyonNo ratings yet
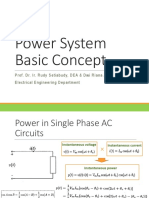
- PS Basic ConceptDocument22 pagesPS Basic ConceptORBIZ ORBIZNo ratings yet
- Grid Connection Control and Simulation of PMSG Wind Power System Based On Three Level NPC ConverterDocument8 pagesGrid Connection Control and Simulation of PMSG Wind Power System Based On Three Level NPC ConverterSEP-PublisherNo ratings yet
- Smart Power Grid SystemDocument64 pagesSmart Power Grid SystemNikhil GawandeNo ratings yet
- Synchronverters: Inverters That Mimic Synchronous GeneratorsDocument9 pagesSynchronverters: Inverters That Mimic Synchronous GeneratorsNoita EnolaNo ratings yet
- C - Archivos de Programa - Schneider - sft2841 - sft2841 Serie 80 - Notice - en - Manual - Sepam - Series80 - Functions - EN PDFDocument272 pagesC - Archivos de Programa - Schneider - sft2841 - sft2841 Serie 80 - Notice - en - Manual - Sepam - Series80 - Functions - EN PDFjllp64803No ratings yet
- Electrical Theory History and FundamentalsDocument32 pagesElectrical Theory History and FundamentalsFRANCES ANN ESPONILLANo ratings yet
- BEE047 PSOC NotesDocument90 pagesBEE047 PSOC NotesCharles RobiansyahNo ratings yet
- Overhead Distribution GuideDocument31 pagesOverhead Distribution GuideZvandaziva NelisherNo ratings yet
- PQM HC 6030Document10 pagesPQM HC 6030ijaxkribsNo ratings yet
- Electric Circuits and Networks_compressed (1)Document358 pagesElectric Circuits and Networks_compressed (1)anki31867No ratings yet
- Syllabus B.tech & M.techDocument40 pagesSyllabus B.tech & M.techWasim ParrayNo ratings yet
- Ll01.2E AA ManualDocument39 pagesLl01.2E AA ManuallalihifiNo ratings yet
- Reactive Energy Management - LV PFC Component - Webinar - July 2022Document110 pagesReactive Energy Management - LV PFC Component - Webinar - July 2022ScalperNo ratings yet
- Opm 40 KvaDocument103 pagesOpm 40 Kvarajabharath12No ratings yet
- M 03Document38 pagesM 03JunaidYounusChohanNo ratings yet