You might also like
- Pages From 10.11648.j.eas.20180301.12-2Document2 pagesPages From 10.11648.j.eas.20180301.12-2Mohamed ZaghloulNo ratings yet
- A Practical Assessment of The Power Grid Inertia Constant Using PMUsDocument5 pagesA Practical Assessment of The Power Grid Inertia Constant Using PMUsMuhammad Saqib AliNo ratings yet
- Paper Review 1234Document18 pagesPaper Review 1234Gedef YirgalemNo ratings yet
- Electrical Engineering Engineering Power System Analysis and Stability Stability Studies NotesDocument32 pagesElectrical Engineering Engineering Power System Analysis and Stability Stability Studies NotesAliEjazNo ratings yet
- Resposta de Inércia de Geradores Eólicos de Ímã Permanente Baseados em Conversor de Potência TotalDocument8 pagesResposta de Inércia de Geradores Eólicos de Ímã Permanente Baseados em Conversor de Potência TotalDaniel reisNo ratings yet
- Estimation of Power System Inertia Constant and Capacity of Spinning-Reserve Support Generators Using Measured Frequency TransientsDocument8 pagesEstimation of Power System Inertia Constant and Capacity of Spinning-Reserve Support Generators Using Measured Frequency TransientsadinamartinsNo ratings yet
- MATLAB-Based Transient Stability Analysis of A Power SystemDocument34 pagesMATLAB-Based Transient Stability Analysis of A Power Systemsamarahmad2008479875% (4)
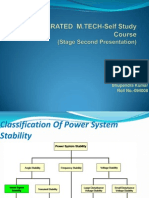
- Bhupendra Kumar Roll No.-094008: Submitted byDocument36 pagesBhupendra Kumar Roll No.-094008: Submitted bytarnedo1No ratings yet
- Chapter 12Document23 pagesChapter 12sachin235No ratings yet
- CP 2011 0188Document6 pagesCP 2011 0188ALI BOUKHRISSNo ratings yet
- Transient Stability Performance Analysis of Power System Using Facts DevicesDocument7 pagesTransient Stability Performance Analysis of Power System Using Facts Devicesrasim_m1146No ratings yet
- Analytical ModelDocument10 pagesAnalytical ModelMicky ArthurNo ratings yet
- Long-Term Frequency Stability Assessment Based On Extended Frequency Response ModelDocument12 pagesLong-Term Frequency Stability Assessment Based On Extended Frequency Response ModeltusharshharmaNo ratings yet
- Transient Stability Analysis of Generation and Transmission System of A Thermal Power Plant of PakistanDocument18 pagesTransient Stability Analysis of Generation and Transmission System of A Thermal Power Plant of Pakistanmattie aqeelNo ratings yet
- Transient Stability Analysis of Synchronous Generator in Electrical NetworkDocument5 pagesTransient Stability Analysis of Synchronous Generator in Electrical NetworkSadil BatafNo ratings yet
- Estimation of Inertia Constant of Iran Power GridDocument3 pagesEstimation of Inertia Constant of Iran Power GridMuhammad AldrinNo ratings yet
- Transient Stability of Small GeneratorDocument8 pagesTransient Stability of Small GeneratorAnonymous BBX2E87aHNo ratings yet
- UNIT-7 & 8 Transient Stability StudiesDocument35 pagesUNIT-7 & 8 Transient Stability StudiesVishalSinghNo ratings yet
- Wind Turbine Efficiency and Grid Code Requirements: Dr. Arshad Ali Assistant ProfessorDocument35 pagesWind Turbine Efficiency and Grid Code Requirements: Dr. Arshad Ali Assistant ProfessorIbn e Adam100% (1)
- Cep PsocDocument31 pagesCep PsocEhtisham RajpootNo ratings yet
- Power System Stabliity Using Power World SimulatorDocument24 pagesPower System Stabliity Using Power World SimulatorfaizanNo ratings yet
- Impact of Low Rotational Inertia On Power System Stability and OperationDocument12 pagesImpact of Low Rotational Inertia On Power System Stability and OperationWoldemariam WorkuNo ratings yet
- Gen - Prot WcpyrtDocument17 pagesGen - Prot WcpyrtAshwinKumar GoswamiNo ratings yet
- A Closed Loop Quasi Optical Dynamic Brak PDFDocument8 pagesA Closed Loop Quasi Optical Dynamic Brak PDFDante FilhoNo ratings yet
- Course Project - ES 586BDocument10 pagesCourse Project - ES 586BMohammedNo ratings yet
- CP 2014 0872Document4 pagesCP 2014 0872ALI BOUKHRISSNo ratings yet
- Freitas2005 PDFDocument7 pagesFreitas2005 PDFOMARNo ratings yet
- PSEDpptDocument30 pagesPSEDpptShubham SinghNo ratings yet
- Unit-3 PsocDocument23 pagesUnit-3 PsocDESI BRAHMNNo ratings yet
- P Matlab y Estab TransitDocument4 pagesP Matlab y Estab TransitrdelgranadoNo ratings yet
- BlauDocument6 pagesBlauhappyworryNo ratings yet
- Paper Joana OliveiraDocument10 pagesPaper Joana OliveiraLê Trung DũngNo ratings yet
- 2-15-1466427029-1. Electrical - Ijeee - Coordinated Effect of Power System Stabilizer - Rampreet ManjhiDocument10 pages2-15-1466427029-1. Electrical - Ijeee - Coordinated Effect of Power System Stabilizer - Rampreet Manjhirobertovm2002No ratings yet
- Design of Power System Stabilizer Based On Adaptive Neuro-Fuzzy MethodDocument9 pagesDesign of Power System Stabilizer Based On Adaptive Neuro-Fuzzy MethodDodi AndriNo ratings yet
- Iet-Rpg 2010 0208Document10 pagesIet-Rpg 2010 0208ALI BOUKHRISSNo ratings yet
- Lecture 18 System StabilityDocument33 pagesLecture 18 System StabilityTEMIDAYONo ratings yet
- Speed Deviation and Multilayer Perceptron Neural Network Based Transient Stability Status Prediction SchemeDocument8 pagesSpeed Deviation and Multilayer Perceptron Neural Network Based Transient Stability Status Prediction Schemeamin0sarkerNo ratings yet
- TEK 150105-Chapter 3 SupplementDocument5 pagesTEK 150105-Chapter 3 SupplementCangkang SainsNo ratings yet
- Inertia - Grid Inertia and Frequency Control in Power Systems With High Penetration of RenewablesDocument6 pagesInertia - Grid Inertia and Frequency Control in Power Systems With High Penetration of Renewablessatyajitebay3No ratings yet
- Transient Stability Enhancement of Power System Using Intelligent TechniqueDocument5 pagesTransient Stability Enhancement of Power System Using Intelligent TechniqueBrijendra SinghNo ratings yet
- Out-Of-Step Protection Fundamentals and Advancements: BstractDocument26 pagesOut-Of-Step Protection Fundamentals and Advancements: BstractalimaghamiNo ratings yet
- Stability Terms+Defs DraftDocument10 pagesStability Terms+Defs DraftKhy-khy PutraNo ratings yet
- What Is Facts?Document36 pagesWhat Is Facts?TahirAbbasNo ratings yet
- Understanding Generator Power System StabilizerDocument12 pagesUnderstanding Generator Power System StabilizerRamakrishna100% (1)
- M.A.M College of Engineering: Department of Electrical and Electronics EnggDocument16 pagesM.A.M College of Engineering: Department of Electrical and Electronics EnggsathishneNo ratings yet
- Stabilty AssignmentDocument7 pagesStabilty AssignmentHasan FahadNo ratings yet
- Power Devices Implementation & Analysis in ETAP: Vancha Abhilash,, Kamlesh PandeyDocument5 pagesPower Devices Implementation & Analysis in ETAP: Vancha Abhilash,, Kamlesh PandeyerpublicationNo ratings yet
- 2011 Current Contributions From Type 3 and Type 4 Wind Turbine Generators During FaultsDocument6 pages2011 Current Contributions From Type 3 and Type 4 Wind Turbine Generators During FaultsAbhishekAnandNo ratings yet
- MATLAB/Simlink Based Power System Stabilizer With PID ControllerDocument14 pagesMATLAB/Simlink Based Power System Stabilizer With PID ControllerragaNo ratings yet
- An Online Method For Inertia Estimating and Its Application in Coherency IdentificationDocument5 pagesAn Online Method For Inertia Estimating and Its Application in Coherency IdentificationSukhjinderNo ratings yet
- Unit VDocument29 pagesUnit Vv.saigeetha lakshmiNo ratings yet
- Loss of Field Protection For GeneratorsDocument18 pagesLoss of Field Protection For GeneratorsDBachai84No ratings yet
- 10 11648 J Sjee 20200804 11Document10 pages10 11648 J Sjee 20200804 11Apila NiangaNo ratings yet
- Review On Frequency Control of Power Systems With Wind Power Penetration51Document8 pagesReview On Frequency Control of Power Systems With Wind Power Penetration51Mohamed BerririNo ratings yet
- Transient Stability Analysis of Power SystemDocument11 pagesTransient Stability Analysis of Power SystemSunil Rai100% (2)
- Subsynchronous Resonance Analysis: Types OF SSR InteractionDocument4 pagesSubsynchronous Resonance Analysis: Types OF SSR InteractionBhavik PrajapatiNo ratings yet
- PSOC PART A & B AnsDocument94 pagesPSOC PART A & B AnsDhivya BNo ratings yet
- Power Measurements Under Nonsinusoidal Conditions : A Thesis in Electrical EngineeringFrom EverandPower Measurements Under Nonsinusoidal Conditions : A Thesis in Electrical EngineeringNo ratings yet
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- Methods for Increasing the Quality and Reliability of Power System Using FACTS DevicesFrom EverandMethods for Increasing the Quality and Reliability of Power System Using FACTS DevicesNo ratings yet
- Hydropower IntroductionDocument73 pagesHydropower IntroductionAvneesh Meena100% (1)
- Wartsila (Sulzer) RT-FLEX82C - Operating ManualDocument363 pagesWartsila (Sulzer) RT-FLEX82C - Operating Manualninja_ninjago94% (16)
- Denso CR - Hp2 NissanDocument31 pagesDenso CR - Hp2 NissanMarcelo Diesel86% (7)
- JK Fenner Format 1Document120 pagesJK Fenner Format 1Raja RamachandranNo ratings yet
- EGR 334 Lecture 36 Gas Reheat and IntercoolingDocument19 pagesEGR 334 Lecture 36 Gas Reheat and IntercoolingIskandar Bell100% (1)
- Optimization of Kiln Plants: Activities and Technical DetailsDocument10 pagesOptimization of Kiln Plants: Activities and Technical DetailsPaulo VidasNo ratings yet
- GTL TechnologyDocument24 pagesGTL Technologychaitanya_scribd100% (1)
- 12-16V4000 Gx3 3B Maintenance Schedule MS50005 - 00EDocument5 pages12-16V4000 Gx3 3B Maintenance Schedule MS50005 - 00EJuan Carlos Mino Eneque100% (2)
- MB Spec EO Service Oils 2012.1Document2 pagesMB Spec EO Service Oils 2012.1Mia Anggraini100% (1)
- CUmmins ISF3Document30 pagesCUmmins ISF3agvassNo ratings yet
- 2.1 JKR 28 Vacuum Brick Production LineDocument5 pages2.1 JKR 28 Vacuum Brick Production LinechrisofomaNo ratings yet
- Regenerative Vehicles ReportDocument92 pagesRegenerative Vehicles ReportHemanth Kumar SNo ratings yet
- D475a BulldozerDocument1,548 pagesD475a Bulldozertincho_0026100% (3)
- MEPC 1-Circ 883Document3 pagesMEPC 1-Circ 883VladimirNo ratings yet
- Brook CromptonDocument28 pagesBrook Cromptonsumitsharma2010100% (1)
- Specifications: 1204E-E44TA and 1204E-E44TTA Industrial EnginesDocument52 pagesSpecifications: 1204E-E44TA and 1204E-E44TTA Industrial Enginesamskroud brahimNo ratings yet
- Injectoare GPLDocument3 pagesInjectoare GPLVisan Dragos100% (1)
- 10 CasingDocument15 pages10 CasingNaser KhanNo ratings yet
- Tab 05 GEK 106899 Startup and Shutdown ControlDocument10 pagesTab 05 GEK 106899 Startup and Shutdown Controlherysyam100% (1)
- Kde12sta3 enDocument4 pagesKde12sta3 enCarlos GonzaloNo ratings yet
- Pneumatic Technology: Learning Outcome Application of Pneumatic Pneumatic CircuitDocument44 pagesPneumatic Technology: Learning Outcome Application of Pneumatic Pneumatic CircuitHafiz RadzaliNo ratings yet
- Ship Particular OB - Persada 2551 PDFDocument1 pageShip Particular OB - Persada 2551 PDFMusuhan Sama CacingNo ratings yet
- PowerPack+brochure+ (V1 0)Document2 pagesPowerPack+brochure+ (V1 0)Khánh VũNo ratings yet
- Air IndiaDocument79 pagesAir Indiaajay singla63% (8)
- 2014-SPE 169394-Pore Pressure Analysis in Chicontepec Basin-Presidente Aleman FieldDocument6 pages2014-SPE 169394-Pore Pressure Analysis in Chicontepec Basin-Presidente Aleman FieldPerla ZumayaNo ratings yet
- Power Cell Generator Technical Data 62.5 KVA PDFDocument2 pagesPower Cell Generator Technical Data 62.5 KVA PDFMousum KabirNo ratings yet
- Delco 55SI AlternadorDocument2 pagesDelco 55SI Alternadorchaos en venaNo ratings yet
- Boll & Kirch Hydraulic Oil FILTERSDocument5 pagesBoll & Kirch Hydraulic Oil FILTERSAnakin SkywalkerNo ratings yet
- RENR97660001Document45 pagesRENR97660001Erlen PolancoNo ratings yet
- Alfa Laval Aalborg Os Tci Marine BoilerDocument2 pagesAlfa Laval Aalborg Os Tci Marine Boilera.lobanov2020No ratings yet