You might also like
- 100 IC CircuitsDocument34 pages100 IC CircuitselektrorwbNo ratings yet
- Dual-Clutch Transmission: Scalable HybridDocument4 pagesDual-Clutch Transmission: Scalable HybridSamadNo ratings yet
- Bench WorkDocument103 pagesBench Workgetu abrahaNo ratings yet
- 01-System Devices Configuration - Rev GDocument36 pages01-System Devices Configuration - Rev GPABITRA PATRANo ratings yet
- Seminar Report On Phasor Measurements UnitsDocument15 pagesSeminar Report On Phasor Measurements UnitsShifa H Rahman0% (2)
- CardiomyopathyDocument1 pageCardiomyopathyTrisha VergaraNo ratings yet
- N-1 Maximum Transfer CapabilityDocument6 pagesN-1 Maximum Transfer CapabilityElmonster10No ratings yet
- KOMP Simetris PDFDocument240 pagesKOMP Simetris PDFGumilarHarsyaPutraNo ratings yet
- Phasor Measurement Unit (PMU) Based Wide Area Protection SystemDocument3 pagesPhasor Measurement Unit (PMU) Based Wide Area Protection Systemamina mazharNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Estimation of Inertia Constant of Iran Power GridDocument3 pagesEstimation of Inertia Constant of Iran Power GridMuhammad AldrinNo ratings yet
- Speed Deviation and Multilayer Perceptron Neural Network Based Transient Stability Status Prediction SchemeDocument8 pagesSpeed Deviation and Multilayer Perceptron Neural Network Based Transient Stability Status Prediction Schemeamin0sarkerNo ratings yet
- Estimation of Power System Inertia Constant and Capacity of Spinning-Reserve Support Generators Using Measured Frequency TransientsDocument8 pagesEstimation of Power System Inertia Constant and Capacity of Spinning-Reserve Support Generators Using Measured Frequency TransientsadinamartinsNo ratings yet
- Early Fault DetectionDocument6 pagesEarly Fault DetectionRajesh GangwarNo ratings yet
- Application of Equal Area Criterion Conditions in The Time Domain For Out-Of-Step Protection-2010Document11 pagesApplication of Equal Area Criterion Conditions in The Time Domain For Out-Of-Step Protection-2010DanielAlejandroRamosQueroNo ratings yet
- Transactions On Power Systems, Voi.6, No. 2, &Y 1991: Study MstemDocument8 pagesTransactions On Power Systems, Voi.6, No. 2, &Y 1991: Study MstemDalessandroNo ratings yet
- Design of Power System Stabilizer Based On Adaptive Neuro-Fuzzy MethodDocument9 pagesDesign of Power System Stabilizer Based On Adaptive Neuro-Fuzzy MethodDodi AndriNo ratings yet
- The Study of Dependency of Power System Stability On System Inertia Constant For Various ContingenciesDocument4 pagesThe Study of Dependency of Power System Stability On System Inertia Constant For Various ContingenciesnahsirkNo ratings yet
- An Online Method For Inertia Estimating and Its Application in Coherency IdentificationDocument5 pagesAn Online Method For Inertia Estimating and Its Application in Coherency IdentificationSukhjinderNo ratings yet
- Post-Disturbance Transient Stability Status Prediction Using Synchrophasor MeasurementsDocument9 pagesPost-Disturbance Transient Stability Status Prediction Using Synchrophasor MeasurementsSukhjinderNo ratings yet
- Dixit Pub Sep 2019Document6 pagesDixit Pub Sep 2019Pradipkumar DixitNo ratings yet
- State Estimation For Electric Power Distribution Systems in Quasi Real-Time ConditionsDocument7 pagesState Estimation For Electric Power Distribution Systems in Quasi Real-Time ConditionsVarikunta Saikrishna ee22d032No ratings yet
- Transient Stability Enhancement of Power System Using Intelligent TechniqueDocument5 pagesTransient Stability Enhancement of Power System Using Intelligent TechniqueBrijendra SinghNo ratings yet
- Long-Term Frequency Stability Assessment Based On Extended Frequency Response ModelDocument12 pagesLong-Term Frequency Stability Assessment Based On Extended Frequency Response ModeltusharshharmaNo ratings yet
- Impact of Grounding System Design On PowDocument5 pagesImpact of Grounding System Design On PowSergio HZNo ratings yet
- MATLAB/Simlink Based Power System Stabilizer With PID ControllerDocument14 pagesMATLAB/Simlink Based Power System Stabilizer With PID ControllerragaNo ratings yet
- Application of Equal Area Criterion Conditions in The Time Domain For Out-of-Step ProtectionDocument10 pagesApplication of Equal Area Criterion Conditions in The Time Domain For Out-of-Step ProtectionROHIT SINGHNo ratings yet
- An Adaptive Power Oscillation Damping Controller by STATCOM With Energy StorageDocument10 pagesAn Adaptive Power Oscillation Damping Controller by STATCOM With Energy StorageB. Vikram AnandNo ratings yet
- Steady State Stability Analysis and Improvement Using Eigenvalues and PSSDocument6 pagesSteady State Stability Analysis and Improvement Using Eigenvalues and PSSNithyashriNo ratings yet
- PMU Measurement Based Voltage Stability Assessment: Imran Sharieff Ranjana SodhiDocument5 pagesPMU Measurement Based Voltage Stability Assessment: Imran Sharieff Ranjana SodhibinodeNo ratings yet
- Power Swing Detection in The Presence of Solar Photovoltaic PlantDocument19 pagesPower Swing Detection in The Presence of Solar Photovoltaic PlantRajendra MullapudiNo ratings yet
- A Machine Learning-Based Fast Frequency Response Control For A VSC-HVDC SystemDocument12 pagesA Machine Learning-Based Fast Frequency Response Control For A VSC-HVDC SystemBounty CowboyNo ratings yet
- Freitas2005 PDFDocument7 pagesFreitas2005 PDFOMARNo ratings yet
- Implementation of Line Stability Index For Contingency Analysis and Screening in Power SystemsDocument6 pagesImplementation of Line Stability Index For Contingency Analysis and Screening in Power SystemsVitthal PatnechaNo ratings yet
- Analysis of Power System Stability of A Hybrid Microgrid For On-Grid and Off-Grid Operation by Using ETAP SoftwareDocument8 pagesAnalysis of Power System Stability of A Hybrid Microgrid For On-Grid and Off-Grid Operation by Using ETAP SoftwareBăng BăngNo ratings yet
- Sensorless Vector Control of Induction Machines For Variable-Speed Wind Energy ApplicationsDocument10 pagesSensorless Vector Control of Induction Machines For Variable-Speed Wind Energy ApplicationsMohamed Ayman Hefny MohamedNo ratings yet
- Anuar 2020 J. Phys. Conf. Ser. 1432 012009Document8 pagesAnuar 2020 J. Phys. Conf. Ser. 1432 012009M Hassan BashirNo ratings yet
- Phasor Measurment Unit For Transient Stability AnalysisDocument11 pagesPhasor Measurment Unit For Transient Stability Analysisfekadu gebeyNo ratings yet
- Energies 16 01414 v2Document24 pagesEnergies 16 01414 v2ashishNo ratings yet
- Transient Stability AnalysisDocument6 pagesTransient Stability AnalysisAmbachew A.0% (1)
- Power System Stability & Control - Wide Area Damping ControllerDocument6 pagesPower System Stability & Control - Wide Area Damping ControllerPradeep MuppanaNo ratings yet
- 15 Self Tuning Virtual Synchronous Machine A Control Strategy For Energy Storage Systems To Support Dynamic Frequency Control.Document8 pages15 Self Tuning Virtual Synchronous Machine A Control Strategy For Energy Storage Systems To Support Dynamic Frequency Control.Fairose N.VNo ratings yet
- Lectura ArticuloDocument6 pagesLectura ArticuloROBERTO CARLOS TORRES MELENDEZNo ratings yet
- Paper Joana OliveiraDocument10 pagesPaper Joana OliveiraLê Trung DũngNo ratings yet
- Swing Voltage StabilityDocument5 pagesSwing Voltage StabilityAhmed SaqrNo ratings yet
- Power Devices Implementation & Analysis in ETAP: Vancha Abhilash,, Kamlesh PandeyDocument5 pagesPower Devices Implementation & Analysis in ETAP: Vancha Abhilash,, Kamlesh PandeyerpublicationNo ratings yet
- Evaluation of Power System Transient Stability and Definition of The Basic Criterion PDFDocument8 pagesEvaluation of Power System Transient Stability and Definition of The Basic Criterion PDFostojic007No ratings yet
- Design of Network For Flexible Transmission Systems: Robust and Adaptive Neural ACDocument8 pagesDesign of Network For Flexible Transmission Systems: Robust and Adaptive Neural ACvireshmathadNo ratings yet
- A Practical Power System Stabilizer Tuning For GARRI Power StationDocument8 pagesA Practical Power System Stabilizer Tuning For GARRI Power StationLê Trung DũngNo ratings yet
- A New Index Based On Proximity of Inter-Area Oscillation To UEP Point For Predicting Proper Time of Controlled IslandingDocument18 pagesA New Index Based On Proximity of Inter-Area Oscillation To UEP Point For Predicting Proper Time of Controlled IslandingLuis Alejandro Olarte AcevedoNo ratings yet
- Advanced Building Blocks of Power Converters For Renewable Energy Based Distributed GeneratorsDocument7 pagesAdvanced Building Blocks of Power Converters For Renewable Energy Based Distributed GeneratorsAnnaRajNo ratings yet
- 2 Parallel-Inverter System With FailureDocument12 pages2 Parallel-Inverter System With FailureRizwan UllahNo ratings yet
- 9609 PDFDocument13 pages9609 PDFnaghamNo ratings yet
- 10 1109@pmaps 2018 8440361Document6 pages10 1109@pmaps 2018 8440361samundra24No ratings yet
- Power System Reliability Enhancement Using Unified Power Flow ControllersDocument6 pagesPower System Reliability Enhancement Using Unified Power Flow ControllersAditya TiwariNo ratings yet
- Transient Stability of Small GeneratorDocument8 pagesTransient Stability of Small GeneratorAnonymous BBX2E87aHNo ratings yet
- Resposta de Inércia de Geradores Eólicos de Ímã Permanente Baseados em Conversor de Potência TotalDocument8 pagesResposta de Inércia de Geradores Eólicos de Ímã Permanente Baseados em Conversor de Potência TotalDaniel reisNo ratings yet
- Transient Stability Simulation of 33 KV Power Grid: Nader Barsoum, Nadira Zulkeffley, Myjessie SongkinDocument18 pagesTransient Stability Simulation of 33 KV Power Grid: Nader Barsoum, Nadira Zulkeffley, Myjessie SongkinAnuroop BansodNo ratings yet
- Thesis PresentatrionDocument41 pagesThesis Presentatrionalamin shawonNo ratings yet
- PMU Optimal Placement Using Sensitivity Analysis For Power Systems Fault LocationDocument6 pagesPMU Optimal Placement Using Sensitivity Analysis For Power Systems Fault LocationRajesh GangwarNo ratings yet
- Power Flow Control of Power Systems Using UPFC Based On Adaptive Neuro FuzzyDocument6 pagesPower Flow Control of Power Systems Using UPFC Based On Adaptive Neuro FuzzyMichael KristiantoNo ratings yet
- WorkDocument15 pagesWorkvflopeNo ratings yet
- Art N5 Luy p26-p29 PDFDocument4 pagesArt N5 Luy p26-p29 PDFsmprabu24317No ratings yet
- Cardenas (2001)Document11 pagesCardenas (2001)jhonatanNo ratings yet
- Optimal Distribution Voltage Control and Coordination With Distributed Generation-jdADocument7 pagesOptimal Distribution Voltage Control and Coordination With Distributed Generation-jdAraghudtsNo ratings yet
- A Neural Network Based Optimal Wide Area Control Scheme For A Power SystemDocument7 pagesA Neural Network Based Optimal Wide Area Control Scheme For A Power Systemapi-3697505No ratings yet
- Exploring Key Weather Factors From Analytical Modeling Toward Improved Solar Power ForecastingDocument11 pagesExploring Key Weather Factors From Analytical Modeling Toward Improved Solar Power ForecastingMuhammad Saqib AliNo ratings yet
- Short-Term Load Forecasting Using An LSTM Neural NetworkDocument6 pagesShort-Term Load Forecasting Using An LSTM Neural NetworkMuhammad Saqib AliNo ratings yet
- Short-Term Multi-Region Load Forecasting Based On Weather and Load Diversity AnalysisDocument6 pagesShort-Term Multi-Region Load Forecasting Based On Weather and Load Diversity AnalysisMuhammad Saqib AliNo ratings yet
- Short-Term Load Forecasting Based On Load Decomposition and Numerical Weather ForecastDocument5 pagesShort-Term Load Forecasting Based On Load Decomposition and Numerical Weather ForecastMuhammad Saqib AliNo ratings yet
- Short-Term Load Forecasting With Weather Component Based On Improved Extreme Learning MachineDocument6 pagesShort-Term Load Forecasting With Weather Component Based On Improved Extreme Learning MachineMuhammad Saqib AliNo ratings yet
- Tpel 2020 3006071Document17 pagesTpel 2020 3006071Muhammad Saqib AliNo ratings yet
- Tpel 2020 2993947Document12 pagesTpel 2020 2993947Muhammad Saqib AliNo ratings yet
- MP3900Document19 pagesMP3900Muhammad Saqib AliNo ratings yet
- US20190341841A1Document10 pagesUS20190341841A1Muhammad Saqib AliNo ratings yet
- The Relevance of Inertia in Power SystemsDocument11 pagesThe Relevance of Inertia in Power SystemsMuhammad Saqib AliNo ratings yet
- Determination of Generator Inertia 1961 TSpaceDocument17 pagesDetermination of Generator Inertia 1961 TSpaceMuhammad Saqib AliNo ratings yet
- Compliant Offshore StructureDocument50 pagesCompliant Offshore Structureapi-27176519100% (4)
- Lecture5 (4) Mech of SolidsDocument18 pagesLecture5 (4) Mech of Solids'jhony' Fauzan NurdinNo ratings yet
- Appendix 2-4.ep31422 - g-16Document15 pagesAppendix 2-4.ep31422 - g-16bsnegi111No ratings yet
- FMB70 Deltapilot S Medidor de Nivel HDocument44 pagesFMB70 Deltapilot S Medidor de Nivel HLICONSA MICHOACANNo ratings yet
- The National TerritoryDocument39 pagesThe National TerritoryRan RanNo ratings yet
- Equipment: MR 51 / MR 51V42 - Handy Power MR 56 / MR 56V42 - Strong PowerDocument4 pagesEquipment: MR 51 / MR 51V42 - Handy Power MR 56 / MR 56V42 - Strong PowerIsmailBelguithNo ratings yet
- AnorexiaDocument1 pageAnorexiaCHIEF DOCTOR MUTHUNo ratings yet
- Unit 2Document9 pagesUnit 2Quinn LilithNo ratings yet
- Features and ComponentsDocument11 pagesFeatures and ComponentsJay SuguitanNo ratings yet
- Modules With Available Quota - 2019!11!12 - 9amDocument7 pagesModules With Available Quota - 2019!11!12 - 9amdhmanoharNo ratings yet
- Ps 0412 0612obh WDocument1 pagePs 0412 0612obh WHunterNo ratings yet
- DS-7204HI-VS Net DVR - V2.0 (080909)Document88 pagesDS-7204HI-VS Net DVR - V2.0 (080909)ANTONIO PEREZNo ratings yet
- Of Love AnalysisDocument8 pagesOf Love AnalysisRica Jane Torres100% (1)
- Doosan Dielsel Forklift d35s 7 d40s 7 d45s 7 d50c 7 d55c 7 d40sc 7 d45sc 7 d50sc 7 d55sc 7 Part Book Sb1223e01Document22 pagesDoosan Dielsel Forklift d35s 7 d40s 7 d45s 7 d50c 7 d55c 7 d40sc 7 d45sc 7 d50sc 7 d55sc 7 Part Book Sb1223e01daleherrera100788nke100% (23)
- RymesDocument6 pagesRymesFarida YesminNo ratings yet
- Keeling 1960 PDFDocument4 pagesKeeling 1960 PDFErick AmâncioNo ratings yet
- CSCI101 - Lab08 - Functions Zewail CityDocument4 pagesCSCI101 - Lab08 - Functions Zewail CityMahmoud Ahmed 202201238No ratings yet
- MAIN Electrical Parts List: Design LOC Sec-Code DescriptionDocument12 pagesMAIN Electrical Parts List: Design LOC Sec-Code DescriptionAndroid Schematics and CircuitsNo ratings yet
- RS68-120 MLN ManuelDocument28 pagesRS68-120 MLN ManuelUmar MajeedNo ratings yet
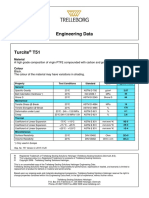
- Turcite T51 Engineering DataDocument1 pageTurcite T51 Engineering DataAntonio Rivera VillavicencioNo ratings yet
- Managing Housekeeping Inventory: Ihm MumbaiDocument5 pagesManaging Housekeeping Inventory: Ihm MumbaiAbhishek ChowdhuryNo ratings yet
- Mita Lifestyle Agenda ContentDocument263 pagesMita Lifestyle Agenda Contentnacentral13517No ratings yet
- Bubble Growth in A Two-Dimensional Viscoelastic Foam: S.L. Everitt, O.G. Harlen, H.J. WilsonDocument14 pagesBubble Growth in A Two-Dimensional Viscoelastic Foam: S.L. Everitt, O.G. Harlen, H.J. Wilsonliviagoncalves197271No ratings yet
- Ste FannyDocument17 pagesSte FannyElmer DE LA CruzNo ratings yet