You might also like
- เอกสารประกอบการสอน การวัดและควบคุมกระบวนการ หน่วยที่ 6 ตัวแปลงสัญญาณDocument32 pagesเอกสารประกอบการสอน การวัดและควบคุมกระบวนการ หน่วยที่ 6 ตัวแปลงสัญญาณEngineering ServiceNo ratings yet
- ข้อมูลทางเทคนิคต่างๆ PDFDocument64 pagesข้อมูลทางเทคนิคต่างๆ PDFภูบดี กรุดสายสอาดNo ratings yet
- มาตรฐานการติดตั้งใหม่ และการเดินสายไฟ PDFDocument34 pagesมาตรฐานการติดตั้งใหม่ และการเดินสายไฟ PDFChaiyuthYuthPromsangNo ratings yet
- Automation 05Document38 pagesAutomation 05ภูบดี กรุดสายสอาดNo ratings yet
- Transdusor 01Document10 pagesTransdusor 01nontronicNo ratings yet
- วงจรการต่อมอเตอร์ไฟฟ้ากระแสสลับDocument16 pagesวงจรการต่อมอเตอร์ไฟฟ้ากระแสสลับFamiry Coke60% (5)
- TransformerAndMaintenance PDFDocument40 pagesTransformerAndMaintenance PDFMr Bouathong NIKTHIXAYNo ratings yet
- โครงสร้างระบบไฟฟ้ากำลังDocument58 pagesโครงสร้างระบบไฟฟ้ากำลังArt Indy100% (3)
- ตู้ควบคุมที่ใช้ในระบบไฟฟ้าDocument4 pagesตู้ควบคุมที่ใช้ในระบบไฟฟ้าWisawachit LimpaiboonNo ratings yet
- บทที่sub3Document12 pagesบทที่sub3pankok67% (3)
- โครงสร้างและสัญลักษณ์ของเพาเวอร์ไดโอด docx11Document6 pagesโครงสร้างและสัญลักษณ์ของเพาเวอร์ไดโอด docx11Tom Caotk100% (1)
- อาณาจักรสำคัญแห่งเมโสโปเตเมียDocument3 pagesอาณาจักรสำคัญแห่งเมโสโปเตเมียploypapatNo ratings yet
- 8 - File - 6 บทที่ 3 ช่างไฟฟ้าอุตสาหกรรม - 19102559132854 -Document8 pages8 - File - 6 บทที่ 3 ช่างไฟฟ้าอุตสาหกรรม - 19102559132854 -sing epe.sNo ratings yet
- อิเล็กทรอนิกส์และงานอุตสาหกรรมDocument14 pagesอิเล็กทรอนิกส์และงานอุตสาหกรรมIi-tech Aun67% (12)
- 09 สายไฟฟ้าDocument25 pages09 สายไฟฟ้าPithoon Ungnaparat100% (1)
- วิวัฒน์ สอนดี NP413 การออกแบบระบบไฟฟ้าDocument10 pagesวิวัฒน์ สอนดี NP413 การออกแบบระบบไฟฟ้ากขคง ฆงจฉNo ratings yet
- ตัวอย่างแผนธุรกิจร้านก๋วยเตี๋ยวเยาวราชDocument102 pagesตัวอย่างแผนธุรกิจร้านก๋วยเตี๋ยวเยาวราชPrasit MeeboonNo ratings yet
- Pon FTTXDocument57 pagesPon FTTXPt BuddhakirdNo ratings yet
- ACPE EngineerDocument24 pagesACPE EngineerwetchkrubNo ratings yet
- บทที่ 8 สถานที่เฉพาะp 1-60Document21 pagesบทที่ 8 สถานที่เฉพาะp 1-60สาธิต ปริ นทร์ทองNo ratings yet
- หนังสือปัญหาทางเทคนิคและวิศวกรรมที่พบบ่อยครั้ง PDFDocument120 pagesหนังสือปัญหาทางเทคนิคและวิศวกรรมที่พบบ่อยครั้ง PDFkrit_kasem100% (1)
- 10214-65 มาตรฐานการติดตั้งทางไฟฟ้า2565 - Yuttana01Document379 pages10214-65 มาตรฐานการติดตั้งทางไฟฟ้า2565 - Yuttana01Intelligent CellNo ratings yet
- การใช้งานโปรแกรม Pspice for windows เบื้องต้น มDocument16 pagesการใช้งานโปรแกรม Pspice for windows เบื้องต้น มjiraek100% (2)
- 6B514826-542B-4836-900A-B1B02EA493D9(1)Document34 pages6B514826-542B-4836-900A-B1B02EA493D9(1)Dusita Vongwai100% (1)
- SCRDocument34 pagesSCRIi-tech Aun50% (2)
- ช่างไฟฟ้า1Document104 pagesช่างไฟฟ้า1Winer Sab100% (1)
- อุปกรณ์ไทริสเตอร์แบบอื่น ๆDocument19 pagesอุปกรณ์ไทริสเตอร์แบบอื่น ๆIi-tech Aun100% (7)
- วงจรรักษาระดับแรงดัน PDFDocument24 pagesวงจรรักษาระดับแรงดัน PDFKrittaphak HacheyramNo ratings yet
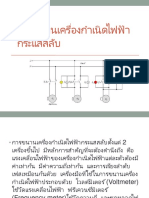
- การขนานเครื่องกำเนิดไฟฟ้ากระแสสลับDocument8 pagesการขนานเครื่องกำเนิดไฟฟ้ากระแสสลับฐิตินันท์ เม่นขํา100% (1)
- Tis1586 1-2555Document82 pagesTis1586 1-2555สาธิต ปริ นทร์ทองNo ratings yet
- วิธีการคำนวณ โซล่าเซลล์Document7 pagesวิธีการคำนวณ โซล่าเซลล์Poom PhongphawitNo ratings yet
- ไฟฟ้าอิเล็กทรอนิกส์ มต้น 231220 084808Document39 pagesไฟฟ้าอิเล็กทรอนิกส์ มต้น 231220 084808Pattranit TeerakosonNo ratings yet
- บทที่ 5 ออปแอมป์ เบื้องต้นDocument18 pagesบทที่ 5 ออปแอมป์ เบื้องต้นศิริกานดา ฟองคำNo ratings yet
- การส่งกำลังด้วยสายพานเฟืองDocument21 pagesการส่งกำลังด้วยสายพานเฟืองSurasan Thepsiri33% (3)
- (14) Krittidet-ECTICARD2017 การใช้ไดอะลักซ์Document4 pages(14) Krittidet-ECTICARD2017 การใช้ไดอะลักซ์voravuth srisomboonsukNo ratings yet
- หนวยที่ 11 ระบบควบคุมทางวิศวกรรมDocument15 pagesหนวยที่ 11 ระบบควบคุมทางวิศวกรรมmao100% (3)
- L4 กระแสของสายไฟฟ้าเมื่อเดินร้อยท่อบนฝ้าเพดานDocument3 pagesL4 กระแสของสายไฟฟ้าเมื่อเดินร้อยท่อบนฝ้าเพดาน249898100% (2)
- Lesson 07 Symmetrical FaultDocument95 pagesLesson 07 Symmetrical FaultNatthaphon Chan-onNo ratings yet
- ระบบควบคุมเบื้องต้น (ไทย)Document309 pagesระบบควบคุมเบื้องต้น (ไทย)Numkang Kang100% (1)
- 002-บทที่ 2 ระบบการส่งจ่ายกำลังไฟฟ้าDocument46 pages002-บทที่ 2 ระบบการส่งจ่ายกำลังไฟฟ้าWisawachit LimpaiboonNo ratings yet
- แผนการสอน การติดตั้งไฟฟ้าในอาคารและในโรงงานDocument60 pagesแผนการสอน การติดตั้งไฟฟ้าในอาคารและในโรงงานBoyza Bakpacker100% (2)
- Power ElectronicsDocument213 pagesPower ElectronicsMiau Mimi100% (1)
- สวิตช์สถิตDocument6 pagesสวิตช์สถิตchanok221No ratings yet
- 22 Electromagnetic รวมDocument295 pages22 Electromagnetic รวมนรพนธ์ อุสาใจNo ratings yet
- DiacDocument13 pagesDiacIi-tech AunNo ratings yet
- เล่มที่ 2 หลักเกณฑ์ราคากลางงานก่อสร้างอาคาร-ปลดล็อก PDFDocument284 pagesเล่มที่ 2 หลักเกณฑ์ราคากลางงานก่อสร้างอาคาร-ปลดล็อก PDFWisawachit Limpaiboon100% (1)
- 507 File คู่มือสาขาช่างไฟฟ้าภายนอกอาคาร-ระดับ1- (ภาคความรู้) 31052561143528Document87 pages507 File คู่มือสาขาช่างไฟฟ้าภายนอกอาคาร-ระดับ1- (ภาคความรู้) 31052561143528chock channel 19100% (1)
- การต่อลงดิน PDFDocument19 pagesการต่อลงดิน PDFAek JayNo ratings yet
- วงจรไฟฟ้าม 3Document71 pagesวงจรไฟฟ้าม 3Kiipz miiNo ratings yet
- 011- บทที 11 การคำนวณกระแสลัดวงจรDocument142 pages011- บทที 11 การคำนวณกระแสลัดวงจรใบบอนสิชลNo ratings yet
- Mac Design CH 1 IntroDocument65 pagesMac Design CH 1 IntroKant VengNo ratings yet
- การติดตั้งท่อลมDocument11 pagesการติดตั้งท่อลมParinpa Ketar100% (2)
- อุปกรณ์ตรวจวัดการเคลื่อนที่หรือตำแหน่งและอุปกรณ์ตรวจวัดการไหลDocument22 pagesอุปกรณ์ตรวจวัดการเคลื่อนที่หรือตำแหน่งและอุปกรณ์ตรวจวัดการไหลIi-tech Aun100% (4)
- ลูกถ้วย 101Document71 pagesลูกถ้วย 101mrhom100% (2)
- กระแสลัดวงจรDocument24 pagesกระแสลัดวงจรPond RitthichaiNo ratings yet
- TUSCO TRAFO - Grand OpeningDocument12 pagesTUSCO TRAFO - Grand OpeningsupasartNo ratings yet
- Wireless Power TransferDocument5 pagesWireless Power TransferYutanaChongjarearnNo ratings yet
- 15 PDFDocument18 pages15 PDFllHA ZYllNo ratings yet
- เอส.ซี.อาร์ (Silicon-controlled Rectifier - SCR) - e-Industrial Technology CenterDocument4 pagesเอส.ซี.อาร์ (Silicon-controlled Rectifier - SCR) - e-Industrial Technology CenterOak ThanaphatNo ratings yet
- ใบงาน Lan Instrument 3 - 1Document10 pagesใบงาน Lan Instrument 3 - 1Abhinant PetchngamjaratNo ratings yet
- การศึกษาปัจจัยที่มีผลต่อความเรียบผิวในกระบวนการกลึง เหล็กกล้าไร้สนิม AISI 316L โดยการออกแบบการทดลองด้วยวิธีไชนินDocument11 pagesการศึกษาปัจจัยที่มีผลต่อความเรียบผิวในกระบวนการกลึง เหล็กกล้าไร้สนิม AISI 316L โดยการออกแบบการทดลองด้วยวิธีไชนินภูบดี กรุดสายสอาดNo ratings yet
- ความรู้เบื้องต้นเกี่ยวกับระเบียบวิธีไฟไนต์เอลิเมนต์Document14 pagesความรู้เบื้องต้นเกี่ยวกับระเบียบวิธีไฟไนต์เอลิเมนต์ภูบดี กรุดสายสอาดNo ratings yet
- Geometric Dimensioning & Tolerancing Theory & Applications - Part IDocument226 pagesGeometric Dimensioning & Tolerancing Theory & Applications - Part Iภูบดี กรุดสายสอาดNo ratings yet
- ปัญหารูพรุน (Porosities) และ ผิวพอง (Blisters) ของงานฉีดสังกะสDocument4 pagesปัญหารูพรุน (Porosities) และ ผิวพอง (Blisters) ของงานฉีดสังกะสภูบดี กรุดสายสอาด100% (1)
- ข้อบกพร่องของชิ้นงานฉีด - product deficient PDFDocument13 pagesข้อบกพร่องของชิ้นงานฉีด - product deficient PDFภูบดี กรุดสายสอาดNo ratings yet
- กรรมวิธีผลิตเหล็กดิบDocument11 pagesกรรมวิธีผลิตเหล็กดิบภูบดี กรุดสายสอาดNo ratings yet
- Hardness TestDocument10 pagesHardness TestVee WorabhornNo ratings yet
- การวิเคราะห์ความเสียหายของแพ็กกิ้งและซีลDocument14 pagesการวิเคราะห์ความเสียหายของแพ็กกิ้งและซีลภูบดี กรุดสายสอาดNo ratings yet
- คุณสมบัติของเหล็กเกรดต่างๆDocument14 pagesคุณสมบัติของเหล็กเกรดต่างๆภูบดี กรุดสายสอาด100% (1)
- CUTTING TOOL TECHNOLOGY - เทคโนโลยีเครื่องมือตัด PDFDocument22 pagesCUTTING TOOL TECHNOLOGY - เทคโนโลยีเครื่องมือตัด PDFภูบดี กรุดสายสอาด100% (3)
- การชุบแข็งคืออะไรDocument2 pagesการชุบแข็งคืออะไรภูบดี กรุดสายสอาดNo ratings yet
- คุณสมบัติของเหล็กเกรดต่างๆDocument14 pagesคุณสมบัติของเหล็กเกรดต่างๆภูบดี กรุดสายสอาด100% (1)
- การวิเคราะห์ความเสียหายของแพ็กกิ้งและซีลDocument14 pagesการวิเคราะห์ความเสียหายของแพ็กกิ้งและซีลภูบดี กรุดสายสอาดNo ratings yet
- เข้าใจสเตนเลส ไม่ยากอย่างที่คิดDocument14 pagesเข้าใจสเตนเลส ไม่ยากอย่างที่คิดภูบดี กรุดสายสอาดNo ratings yet
- การชุบแข็งคืออะไรDocument2 pagesการชุบแข็งคืออะไรภูบดี กรุดสายสอาดNo ratings yet
- Hardness TestDocument10 pagesHardness TestVee WorabhornNo ratings yet
- ข้อบกพร่องของชิ้นงานฉีด - product deficient PDFDocument13 pagesข้อบกพร่องของชิ้นงานฉีด - product deficient PDFภูบดี กรุดสายสอาดNo ratings yet
- ปัญหารูพรุน (Porosities) และ ผิวพอง (Blisters) ของงานฉีดสังกะส PDFDocument4 pagesปัญหารูพรุน (Porosities) และ ผิวพอง (Blisters) ของงานฉีดสังกะส PDFภูบดี กรุดสายสอาดNo ratings yet
- กรรมวิธีผลิตเหล็กดิบDocument11 pagesกรรมวิธีผลิตเหล็กดิบภูบดี กรุดสายสอาดNo ratings yet
- CUTTING TOOL TECHNOLOGY - เทคโนโลยีเครื่องมือตัด PDFDocument22 pagesCUTTING TOOL TECHNOLOGY - เทคโนโลยีเครื่องมือตัด PDFภูบดี กรุดสายสอาด100% (3)
- Ocv PDFDocument28 pagesOcv PDFNakharin MuangbunNo ratings yet
- ขอบกพรองของการชุบเคลือบชิ้นงานฉีดสังกะส PDFDocument8 pagesขอบกพรองของการชุบเคลือบชิ้นงานฉีดสังกะส PDFภูบดี กรุดสายสอาดNo ratings yet
- เข้าใจสเตนเลส ไม่ยากอย่างที่คิดDocument12 pagesเข้าใจสเตนเลส ไม่ยากอย่างที่คิดภูบดี กรุดสายสอาดNo ratings yet
- หลักการเบื้องต้นของการถ่านยเทความร้อน PDFDocument56 pagesหลักการเบื้องต้นของการถ่านยเทความร้อน PDFภูบดี กรุดสายสอาดNo ratings yet
- การเชื่อมอาร์กลวดหุ้มฟลักซ์Document61 pagesการเชื่อมอาร์กลวดหุ้มฟลักซ์ภูบดี กรุดสายสอาด77% (13)
- Solid WorksDocument87 pagesSolid Worksภูบดี กรุดสายสอาด67% (3)
- Accessory Pneumatic SystemDocument24 pagesAccessory Pneumatic SystemSuppachai DanpreechakulNo ratings yet
- งานเชื่อมแก๊สDocument85 pagesงานเชื่อมแก๊สtantibaNo ratings yet
- Ch3 Surface TextureDocument10 pagesCh3 Surface TextureOsu AmpawanonNo ratings yet