You might also like
- Asenkron Motorlara Yol Verme SunuDocument117 pagesAsenkron Motorlara Yol Verme SunutekhakkoNo ratings yet
- Rüzgar Enerjisi Yatırım FizibilitesiDocument8 pagesRüzgar Enerjisi Yatırım FizibilitesiArefe MadenNo ratings yet
- Fotovoltai̇k Güç Destekli̇ Mi̇kro Sulama Si̇stemi̇ Projesi̇-1: Genel EsaslarDocument6 pagesFotovoltai̇k Güç Destekli̇ Mi̇kro Sulama Si̇stemi̇ Projesi̇-1: Genel EsaslarÜmran100% (1)
- A. G. PANOLARI Webinar-1 PDFDocument46 pagesA. G. PANOLARI Webinar-1 PDFbkarakoseNo ratings yet
- ELEKTRIK MAKINALARı DENEYLERIDocument39 pagesELEKTRIK MAKINALARı DENEYLERImakedo33No ratings yet
- Diversite HesabıDocument31 pagesDiversite Hesabıkorea12345fsfagvdsvNo ratings yet
- Otomatik Güneş Takip SistemiDocument12 pagesOtomatik Güneş Takip Sistemishaqtr81No ratings yet
- 1.4 Asansör Elektrik Ve Kontrol SistemiDocument18 pages1.4 Asansör Elektrik Ve Kontrol Sistemikaksa_8775% (4)
- Enerji Uretim Ve Iletiminde Elektrik Ve Otomasyon SistemleriDocument23 pagesEnerji Uretim Ve Iletiminde Elektrik Ve Otomasyon Sistemleriburkinafasoglu0% (1)
- Dagitim Trafolarinin SecimiDocument4 pagesDagitim Trafolarinin SeciminecmettinsengunNo ratings yet
- Yüksek Geri̇li̇m Tesi̇sleri̇ Topraklama Standartlarinin KarşilaştirilmasiDocument16 pagesYüksek Geri̇li̇m Tesi̇sleri̇ Topraklama Standartlarinin KarşilaştirilmasiRamazan Paltun100% (1)
- Ayırıcı Çeşitleri Ve Özellikleri NelerdirDocument11 pagesAyırıcı Çeşitleri Ve Özellikleri NelerdirAli HazarNo ratings yet
- Rüzgar Ve Güneş Enerjisi Sistemlerinin Eksergoekonomik AnaliziDocument161 pagesRüzgar Ve Güneş Enerjisi Sistemlerinin Eksergoekonomik AnaliziKaan ZumrutkayaNo ratings yet
- Siemens S7 300 PLC NotlariDocument91 pagesSiemens S7 300 PLC NotlariBilgin EgemenNo ratings yet
- Lojik Devreler Ders NotlarıDocument86 pagesLojik Devreler Ders NotlarıGaspar NoeNo ratings yet
- Gunes EnerjisiDocument90 pagesGunes Enerjisihereli2No ratings yet
- Dosyalar Teknikbilgiler Elektrik Tesisat Aydinlatma ProjeleriDocument35 pagesDosyalar Teknikbilgiler Elektrik Tesisat Aydinlatma ProjelerineonapcanNo ratings yet
- Konutlarda Tesisat Uygulamalarının Iç Mekana EtkisiDocument104 pagesKonutlarda Tesisat Uygulamalarının Iç Mekana EtkisiMehrangezkhon AnvarovnaNo ratings yet
- ScadaDocument13 pagesScadaapi-373802950% (2)
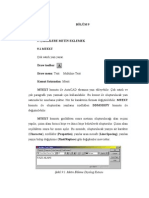
- Autocad Cizime Metin EklemekDocument14 pagesAutocad Cizime Metin Eklemekirdem denizcilikNo ratings yet
- 5-Doğru Bilinen YanlışlarDocument5 pages5-Doğru Bilinen YanlışlarOTOMASYON PLCNo ratings yet
- Alıcı-Verici RF DevresiDocument70 pagesAlıcı-Verici RF Devresi8666160No ratings yet
- Kompanzasyon Cihazları Ve MontajıDocument49 pagesKompanzasyon Cihazları Ve MontajıerdemmorNo ratings yet
- Elektrik TesisleriDocument43 pagesElektrik Tesislerimurats88No ratings yet
- EMO KD Seminer-2Document48 pagesEMO KD Seminer-2Hasan Hatice IlcalıNo ratings yet
- OG ProjelendirmeDocument62 pagesOG ProjelendirmeMellOgreNo ratings yet
- Endustriyel Otomasyon Ve Robot Sistemleri-1Document40 pagesEndustriyel Otomasyon Ve Robot Sistemleri-1Mehmet ÖzdenNo ratings yet
- Transformatör Arizalarinin İncelenmesi̇ PDFDocument273 pagesTransformatör Arizalarinin İncelenmesi̇ PDFagnostic07No ratings yet
- Yüksek GerilimDocument37 pagesYüksek GerilimEmin SaraçNo ratings yet
- Fotovoltaik Sistemler Ve Uygulamalari.122101 PDFDocument119 pagesFotovoltaik Sistemler Ve Uygulamalari.122101 PDFOrhan akgülNo ratings yet
- 2 - Kumanda Ders NotlarıDocument71 pages2 - Kumanda Ders NotlarıAYHAN YAZICINo ratings yet
- Enerji Iletimi Ve Dagitiminin OnemiDocument16 pagesEnerji Iletimi Ve Dagitiminin OnemiErdem SözerNo ratings yet
- Makine MühendisiDocument2 pagesMakine MühendisiekremsalihNo ratings yet
- Aydınlatma, Aydınlatmanın Yararları, Neden Yol Aydınlatması, Aydınlatma DüzenleriDocument59 pagesAydınlatma, Aydınlatmanın Yararları, Neden Yol Aydınlatması, Aydınlatma DüzenleriAlperNo ratings yet
- ELEKTRİK TESİSLERİ PROJE, UYGULAMA, YÖNETMELİKLER GÜVENLİK VE TOPRAKLAMADA YENiLiKLER Prof Dr. İsmail KAŞIKÇIDocument11 pagesELEKTRİK TESİSLERİ PROJE, UYGULAMA, YÖNETMELİKLER GÜVENLİK VE TOPRAKLAMADA YENiLiKLER Prof Dr. İsmail KAŞIKÇIOTOMASYON PLCNo ratings yet
- Og Dağitim Pano GörünüşDocument73 pagesOg Dağitim Pano GörünüşCenk KarNo ratings yet
- Akıllı Şebekeler & SCADA UygulamalarıDocument23 pagesAkıllı Şebekeler & SCADA Uygulamalarıhozipek5599No ratings yet
- Pano ElemanlariDocument47 pagesPano ElemanlariYusuf AlırNo ratings yet
- 4-Kısa Devre Akım HesaplarıDocument13 pages4-Kısa Devre Akım HesaplarıOTOMASYON PLCNo ratings yet
- Topraklama It TT TN TNS Si̇stemleri̇Document11 pagesTopraklama It TT TN TNS Si̇stemleri̇necmettinsengunNo ratings yet
- Ki Ta P: Elektri K Kuvvetli AKI MDocument224 pagesKi Ta P: Elektri K Kuvvetli AKI Mfatih karagözNo ratings yet
- Autocad Koordinat SistemleriDocument14 pagesAutocad Koordinat Sistemleriirdem denizcilik100% (1)
- Guc ElektronigiDocument67 pagesGuc Elektronigikalambur123100% (1)
- Elektromekani̇k Kumanda Si̇stemleri̇Document167 pagesElektromekani̇k Kumanda Si̇stemleri̇HASAN ÇAMCINo ratings yet
- Şehir Şebekeleri OG-AG Elektrik Projesi Yapım Esasları El-Kitabi-5Document83 pagesŞehir Şebekeleri OG-AG Elektrik Projesi Yapım Esasları El-Kitabi-5lemayn100% (1)
- 2-Elk - Prj.sik Karşilaşilan SorunlarDocument53 pages2-Elk - Prj.sik Karşilaşilan SorunlarhasanNo ratings yet
- Nöromorfik Mühendislik: Sinir sisteminde bulunan nörobiyolojik yapıları taklit etmek için elektriksel analog devre sistemlerini kullanma pratiğiFrom EverandNöromorfik Mühendislik: Sinir sisteminde bulunan nörobiyolojik yapıları taklit etmek için elektriksel analog devre sistemlerini kullanma pratiğiNo ratings yet
- Lityum Demir Fosfat Pil: Elektrikli araçlarda, mobil cihazlarda ve dizüstü bilgisayarlarda Lityum İyonu tahttan indirmekFrom EverandLityum Demir Fosfat Pil: Elektrikli araçlarda, mobil cihazlarda ve dizüstü bilgisayarlarda Lityum İyonu tahttan indirmekNo ratings yet
- Dinamik Zırh: Büyük miktarda enerjiyi deliciye boşaltmak, buharlaştırmak, hatta bir plazmaya dönüştürmek ve saldırıyı önemli ölçüde dağıtmakFrom EverandDinamik Zırh: Büyük miktarda enerjiyi deliciye boşaltmak, buharlaştırmak, hatta bir plazmaya dönüştürmek ve saldırıyı önemli ölçüde dağıtmakNo ratings yet
- Yoğunlaştırılmış Güneş Enerjisi: Güneş ışığını bir alıcıya yoğunlaştırmak için aynalar veya lensler kullanmaFrom EverandYoğunlaştırılmış Güneş Enerjisi: Güneş ışığını bir alıcıya yoğunlaştırmak için aynalar veya lensler kullanmaNo ratings yet
- Amorf Metal: Gelecekten gelen ince metalik cam, alüminyum folyoya benziyor, ancak onu yırtmaya çalışın ya da tüm gücünüzle kesip kesemeyeceğinizi görün.From EverandAmorf Metal: Gelecekten gelen ince metalik cam, alüminyum folyoya benziyor, ancak onu yırtmaya çalışın ya da tüm gücünüzle kesip kesemeyeceğinizi görün.No ratings yet
- Yarı Saydam Beton: Nasıl görünür duvarlar? Gece ve gündüz aydınlatma için nano optiklerin kullanılması ve ince beton ile optik fiberlerin karıştırılmasıFrom EverandYarı Saydam Beton: Nasıl görünür duvarlar? Gece ve gündüz aydınlatma için nano optiklerin kullanılması ve ince beton ile optik fiberlerin karıştırılmasıNo ratings yet
- Metal Köpük: Arabanızın tamponundaysa, saatte otuz millik bir çarpışma, daha çok saatte beş millik bir çamurluk bükücü gibi olur.From EverandMetal Köpük: Arabanızın tamponundaysa, saatte otuz millik bir çarpışma, daha çok saatte beş millik bir çamurluk bükücü gibi olur.No ratings yet
- Manyetolojik Akışkan: Demir Adam kostümü bir bilim kurgu eseridir ve bugün henüz mümkün olmayan fütüristik bir mühendislik harikası gibi görünmektedir. Yoksa öyle mi?From EverandManyetolojik Akışkan: Demir Adam kostümü bir bilim kurgu eseridir ve bugün henüz mümkün olmayan fütüristik bir mühendislik harikası gibi görünmektedir. Yoksa öyle mi?No ratings yet
- Gizleme Cihazı: Görünmezlik pelerinleri sadece mümkün olmakla kalmıyor, aynı zamanda hızla gerçeğe dönüşüyor.From EverandGizleme Cihazı: Görünmezlik pelerinleri sadece mümkün olmakla kalmıyor, aynı zamanda hızla gerçeğe dönüşüyor.No ratings yet
- Grafik İşlem Birimlerinde Genel Amaçlı Hesaplama: Normalde CPU tarafından gerçekleştirilen hesaplamaları gerçekleştirmek için Grafik İşlem Biriminin (GPU) kullanılmasıFrom EverandGrafik İşlem Birimlerinde Genel Amaçlı Hesaplama: Normalde CPU tarafından gerçekleştirilen hesaplamaları gerçekleştirmek için Grafik İşlem Biriminin (GPU) kullanılmasıNo ratings yet
- Iletken Polimer: Tıp endüstrisi, doku mühendisliği ve biyosensörler, tüm organları restore etmek veya bulaşıcı hastalıkları teşhis etmek için devrim yarattı.From EverandIletken Polimer: Tıp endüstrisi, doku mühendisliği ve biyosensörler, tüm organları restore etmek veya bulaşıcı hastalıkları teşhis etmek için devrim yarattı.No ratings yet
- Otonom Robotik: Otonom Bir Robot Time Dergisi'nin Kapağında Nasıl Yer Alacak?From EverandOtonom Robotik: Otonom Bir Robot Time Dergisi'nin Kapağında Nasıl Yer Alacak?No ratings yet
- Elektri̇k Teçhi̇zatlarina Uygulanan Testler-4Document75 pagesElektri̇k Teçhi̇zatlarina Uygulanan Testler-4hozipekNo ratings yet
- Erozyonla MucadeleDocument20 pagesErozyonla MucadelehozipekNo ratings yet
- Senkron Rüzgar Türbi̇nleri̇ Ve Kontrol Si̇stemleri̇Document4 pagesSenkron Rüzgar Türbi̇nleri̇ Ve Kontrol Si̇stemleri̇hozipekNo ratings yet
- Rüzgar Türbi̇ni̇Document2 pagesRüzgar Türbi̇ni̇hozipekNo ratings yet
- Rüzgâr Enerji̇si̇Document6 pagesRüzgâr Enerji̇si̇hozipekNo ratings yet
- Eski̇ Kazanlara Yeni̇ Teknoloji̇ - Akiskan Yatakli Yakicilarin AdaptasyonuDocument8 pagesEski̇ Kazanlara Yeni̇ Teknoloji̇ - Akiskan Yatakli Yakicilarin AdaptasyonuhozipekNo ratings yet