You might also like
- Ebook Digital Information Age An Introduction To Electrical Engineering 2Nd Edition Roman Kuc Solutions Manual Full Chapter PDFDocument35 pagesEbook Digital Information Age An Introduction To Electrical Engineering 2Nd Edition Roman Kuc Solutions Manual Full Chapter PDFconnielopezpmdrzqcjbn100% (8)
- Adaptive Control 2nd. Edt. by Karl.J.astrom - Solution ManuelDocument46 pagesAdaptive Control 2nd. Edt. by Karl.J.astrom - Solution Manuelvervesolar33% (3)
- Additional Exercises For Vectors, Matrices, and Least SquaresDocument41 pagesAdditional Exercises For Vectors, Matrices, and Least SquaresAlejandro Patiño RiveraNo ratings yet
- Nyquest & Bode Plot AnalysesDocument12 pagesNyquest & Bode Plot AnalysesSam185No ratings yet
- Zadatak 1 % A) : Izvještaj Za Vježbu 6: Polarni I Nyquistovi DijagramiDocument8 pagesZadatak 1 % A) : Izvještaj Za Vježbu 6: Polarni I Nyquistovi DijagramiPlamenkoNo ratings yet
- NyquistDocument12 pagesNyquistOsel Novandi WitohendroNo ratings yet
- 2.004 Dynamics and Control II: S-PlaneDocument9 pages2.004 Dynamics and Control II: S-PlaneKripa nandNo ratings yet
- 8 TutorialDocument6 pages8 Tutorials.a.s1d3233No ratings yet
- SR07Document7 pagesSR07khayrul islamNo ratings yet
- Module 5: Design of Sampled Data Control Systems: Lecture Note 3Document6 pagesModule 5: Design of Sampled Data Control Systems: Lecture Note 3Yuv RajNo ratings yet
- m5 Lec4Document5 pagesm5 Lec4VIKAS BHATINo ratings yet
- Function Approximation Case Study: Smart SensorDocument10 pagesFunction Approximation Case Study: Smart SensorAlee LópezNo ratings yet
- Computer Aided Design and Simulation: Assignment 2Document7 pagesComputer Aided Design and Simulation: Assignment 2Kaumadee Shashikala SamarakoonNo ratings yet
- Spring Mass SystemDocument4 pagesSpring Mass SystemsgorchisNo ratings yet
- θ; and the externally applied torque T (t) - We findDocument11 pagesθ; and the externally applied torque T (t) - We findRau Lance CunananNo ratings yet
- m5 Lec2Document6 pagesm5 Lec2VIKAS BHATINo ratings yet
- Bisection MethodDocument2 pagesBisection MethodMohammed al-mashabiNo ratings yet
- Solutions To Selected Problems in Chapter 5: 1 Problem 5.1Document13 pagesSolutions To Selected Problems in Chapter 5: 1 Problem 5.1Ian RidzuanNo ratings yet
- Matlab Program For Second Order FD Solution To Poisson's EquationDocument3 pagesMatlab Program For Second Order FD Solution To Poisson's EquationugoNo ratings yet
- Exam RT1 2011 1 enDocument13 pagesExam RT1 2011 1 enArmando MaloneNo ratings yet
- Digital Signal Processing: Solved HW For Day 9Document20 pagesDigital Signal Processing: Solved HW For Day 9Cuau SuarezNo ratings yet
- Setin 2017Document1 pageSetin 2017robertoNo ratings yet
- Y (S) U (S)Document5 pagesY (S) U (S)Luis CarvalhoNo ratings yet
- Lecture 04: 2D & 3D Graphs: - Line Graphs - Bar-Type Graphs - Area Graphs - Mesh Graphs - Surf Graphs - Other GraphsDocument59 pagesLecture 04: 2D & 3D Graphs: - Line Graphs - Bar-Type Graphs - Area Graphs - Mesh Graphs - Surf Graphs - Other GraphsBirhex FeyeNo ratings yet
- Caie As Level Maths 9709 Mechanics v1Document11 pagesCaie As Level Maths 9709 Mechanics v1Ladslous JeketeraNo ratings yet
- Luc CA 2018 Nyquist CriterionDocument8 pagesLuc CA 2018 Nyquist CriterionΑλέξανδρος ΜπομπNo ratings yet
- Ejercicios NyquistDocument13 pagesEjercicios Nyquistpepe gomezNo ratings yet
- Ps6sol v2 PDFDocument13 pagesPs6sol v2 PDFRahuldev MuraleedharanNo ratings yet
- Sample Midterm #2Document7 pagesSample Midterm #2sharadpjadhavNo ratings yet
- EXAMPLE 7-10: / Control Systems Analysis and Design by The Frequency-Response MethodDocument4 pagesEXAMPLE 7-10: / Control Systems Analysis and Design by The Frequency-Response MethodJULIONo ratings yet
- CLC Close G1 TF (1, (1 1 0) ) H 1 ATAUR G1/ (1+G1 H) (WN, Z) Damp (ATAUR) T 0:.1:30 y Step (ATAUR, T) Plot (T, Y) Grid TitleDocument8 pagesCLC Close G1 TF (1, (1 1 0) ) H 1 ATAUR G1/ (1+G1 H) (WN, Z) Damp (ATAUR) T 0:.1:30 y Step (ATAUR, T) Plot (T, Y) Grid TitleSanjid ElahiNo ratings yet
- CS615 - Assignment 2Document7 pagesCS615 - Assignment 2matimandaNo ratings yet
- ENG3018 Practical 0Document11 pagesENG3018 Practical 0henryNo ratings yet
- Control PID Avanzado 2da Edicion Karl Johan Åström, Björn WittenmarkDocument47 pagesControl PID Avanzado 2da Edicion Karl Johan Åström, Björn WittenmarkDavid Rivera ANo ratings yet
- Module 7: Discrete State Space Models: Lecture Note 4Document7 pagesModule 7: Discrete State Space Models: Lecture Note 4deepak1133No ratings yet
- Clustering Case Study: Forest Cover TypesDocument10 pagesClustering Case Study: Forest Cover TypesAlee LópezNo ratings yet
- LAB 7 Report: Course Title: Control SystemsDocument5 pagesLAB 7 Report: Course Title: Control SystemsTajdar HaiderNo ratings yet
- PR Ufung Regelungstechnik I (Control Systems I) : To Be Returned at The End of The Exam!Document13 pagesPR Ufung Regelungstechnik I (Control Systems I) : To Be Returned at The End of The Exam!Armando MaloneNo ratings yet
- Lec08 2015Document42 pagesLec08 2015Abdelmajid AbouloifaNo ratings yet
- EE451 Ch4 F13 PDFDocument11 pagesEE451 Ch4 F13 PDFAhmad AbunassarNo ratings yet
- Solution Problem 5Document5 pagesSolution Problem 5DeVillersSeciNo ratings yet
- Discrete SystemsDocument12 pagesDiscrete SystemsjoukendNo ratings yet
- Control Systems I Exercise Set 9: Learning Objectives: The Student CanDocument6 pagesControl Systems I Exercise Set 9: Learning Objectives: The Student CanArmando MaloneNo ratings yet
- Quasi Explicit Calibration of Gatheral SVI ModelDocument15 pagesQuasi Explicit Calibration of Gatheral SVI ModelRayan RayanNo ratings yet
- Unsymm Bending ExampleDocument5 pagesUnsymm Bending ExampleArifsalimNo ratings yet
- Models For Stationary Time Series: T T T PTP TDocument24 pagesModels For Stationary Time Series: T T T PTP TGeneral MasterNo ratings yet
- EE342 Spring 2007 Midterm ExamDocument4 pagesEE342 Spring 2007 Midterm Examtt esNo ratings yet
- Digital Information Age An Introduction To Electrical Engineering 2nd Edition Roman Kuc Solutions ManualDocument13 pagesDigital Information Age An Introduction To Electrical Engineering 2nd Edition Roman Kuc Solutions Manualkennethwolfeycqrzmaobe100% (29)
- How To Wirte A EssayDocument3 pagesHow To Wirte A EssayVibhas ReddyNo ratings yet
- LKJGGDVVJHDocument6 pagesLKJGGDVVJHT CNo ratings yet
- CTNC 1 2Document2 pagesCTNC 1 2Sahil VoraNo ratings yet
- Control System Design Course Work LLDocument9 pagesControl System Design Course Work LLSaqib NaseerNo ratings yet
- Earth's Magnetic Field: College of Arts and Sciences Mathematics, Statistics and Physics Department Physics ProgramDocument4 pagesEarth's Magnetic Field: College of Arts and Sciences Mathematics, Statistics and Physics Department Physics ProgramAbdulNo ratings yet
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesFrom EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesRating: 1.5 out of 5 stars1.5/5 (2)
- Let's Practise: Maths Workbook Coursebook 7From EverandLet's Practise: Maths Workbook Coursebook 7No ratings yet
- Standard-Slope Integration: A New Approach to Numerical IntegrationFrom EverandStandard-Slope Integration: A New Approach to Numerical IntegrationNo ratings yet
- Karpagam College of Engineering: Coimbatore-32Document2 pagesKarpagam College of Engineering: Coimbatore-32D Geetha DuraiNo ratings yet
- 450 Watt 6m Amplifier: Chris, G3WOS - July 1993Document10 pages450 Watt 6m Amplifier: Chris, G3WOS - July 1993Adrian DrakesNo ratings yet
- Advanced High-Power Factor Preregulator: Features DescriptionDocument17 pagesAdvanced High-Power Factor Preregulator: Features DescriptionMedo AntikaNo ratings yet
- Lecture 6Document33 pagesLecture 6aravindhbaleboinaNo ratings yet
- EC2254 UwDocument376 pagesEC2254 UwHari vNo ratings yet
- Ica Lab (135) Iii-IDocument87 pagesIca Lab (135) Iii-IesesesNo ratings yet
- Yaesu VX-7R Technical SuplementDocument58 pagesYaesu VX-7R Technical SuplementYayok S. Anggoro100% (2)
- Confidential For Leahope: Bluetooth 3.0 Single Chip For HID ApplicationsDocument34 pagesConfidential For Leahope: Bluetooth 3.0 Single Chip For HID ApplicationsMarcelo ArcuriNo ratings yet
- 3.15: Transistors in Forward Active' Mode Common Base CircuitDocument1 page3.15: Transistors in Forward Active' Mode Common Base CircuitMaciel Gomes Dos SantosNo ratings yet
- SC471MLTRT DatasheetDocument27 pagesSC471MLTRT DatasheetFiskoaujNo ratings yet
- Practical DTDocument19 pagesPractical DTKundan BhartiNo ratings yet
- ECE2002 Lab FAT Slot L1Document4 pagesECE2002 Lab FAT Slot L1Rahul ChahalNo ratings yet
- Direct RF Conversion: From Vision To Reality: Tommy NeuDocument9 pagesDirect RF Conversion: From Vision To Reality: Tommy NeuRoxana BirtumNo ratings yet
- 607 Lect 5 Flipped Voltage FollowerDocument38 pages607 Lect 5 Flipped Voltage Followerปรัชญาภรณ์ สิงหนาทNo ratings yet
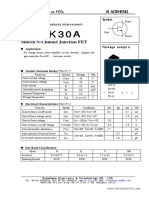
- K30a PDFDocument1 pageK30a PDFVictorManuelBernalBlancoNo ratings yet
- CAT93C4611J-25TE13 To CAT93C8634UI-45TE13Document11 pagesCAT93C4611J-25TE13 To CAT93C8634UI-45TE13rolandseNo ratings yet
- Controlador en Secundario BitmainDocument15 pagesControlador en Secundario BitmainJesus Teodoro Mendoza GuerraNo ratings yet
- Quad Low Side Driver: DescriptionDocument17 pagesQuad Low Side Driver: DescriptionDan EsentherNo ratings yet
- BPHEL 144 (English)Document96 pagesBPHEL 144 (English)JIJOMON O RNo ratings yet
- Amcc S3051aDocument14 pagesAmcc S3051aMichel GujawskiNo ratings yet
- XILINX XC SeriesDocument41 pagesXILINX XC SeriesAnil Kumar YernintiNo ratings yet
- DatasheetDocument12 pagesDatasheetjavier ortizNo ratings yet
- 3 Bit Synchronous Up Counter Mod 8Document4 pages3 Bit Synchronous Up Counter Mod 8Sujan ProdhanNo ratings yet
- Bidirectional Visitor CounterDocument35 pagesBidirectional Visitor CounterParthi_8971% (7)
- Bachelor's of Electrical Engineering: Microprocessor & Microcontroller (Assignment # 03)Document5 pagesBachelor's of Electrical Engineering: Microprocessor & Microcontroller (Assignment # 03)Jawad Ul Hassan ShahNo ratings yet
- Audio Filter For CWDocument3 pagesAudio Filter For CWΔημητριος ΣταθηςNo ratings yet
- Internal Structure of Op-Amps and Audio Power AmpsDocument8 pagesInternal Structure of Op-Amps and Audio Power AmpsRudrahara100% (1)
- Trans Switch AmplDocument47 pagesTrans Switch AmplNugie TyoNo ratings yet
- Dokumen - Tips - System On Chip Soc 5584a750d1651Document21 pagesDokumen - Tips - System On Chip Soc 5584a750d1651pankaj chandankhedeNo ratings yet