You might also like
- Chapter 6 - Work and Energy: Application of Work-Energy Method: Constant Forces (ProblemDocument8 pagesChapter 6 - Work and Energy: Application of Work-Energy Method: Constant Forces (ProblemRiver RunNo ratings yet
- Jyotish - A Manual of Hindu Astrology - B.v.raman - 1992Document149 pagesJyotish - A Manual of Hindu Astrology - B.v.raman - 1992Ram RamNo ratings yet
- Siehl, Caitlyn-Whatweburied Digitaledition (2015)Document64 pagesSiehl, Caitlyn-Whatweburied Digitaledition (2015)Bahar Gaser100% (1)
- To Study The Open Circuit/Core Losses of Single Phase TransformerDocument5 pagesTo Study The Open Circuit/Core Losses of Single Phase TransformerTanzeel UR RehmanNo ratings yet
- Test2 - Sem1 - 15 - 16 SOLUTIONDocument3 pagesTest2 - Sem1 - 15 - 16 SOLUTIONlolipopNo ratings yet
- ENCV4GS_ Test 1_ SolutionDocument6 pagesENCV4GS_ Test 1_ Solution217005052No ratings yet
- Midterm-Solutions UocDocument6 pagesMidterm-Solutions UocVatsal ShahNo ratings yet
- INVENTORY MANAGEMENT HOMEWORKDocument3 pagesINVENTORY MANAGEMENT HOMEWORKYolo PhongNo ratings yet
- Cator - Giland MEC145 Assignment 2Document6 pagesCator - Giland MEC145 Assignment 2Cator GilandNo ratings yet
- Lateral A & HDocument8 pagesLateral A & HArt AV B LimNo ratings yet
- Chapter 2Document4 pagesChapter 2ourdreamsandfuture2004No ratings yet
- MD INC AZ TVD VS N/S E/W: EjercicioDocument9 pagesMD INC AZ TVD VS N/S E/W: EjerciciorodrigoNo ratings yet
- TRK Problem 8.3Document12 pagesTRK Problem 8.3Wahidin ShekoskiNo ratings yet
- 2013 Exam2 Solution - Fluids MechanicsDocument7 pages2013 Exam2 Solution - Fluids MechanicsChristophe EmerichNo ratings yet
- Ch8 (3) Numerical IntegrationDocument19 pagesCh8 (3) Numerical Integrationআসিফ রেজাNo ratings yet
- Tutorial Sheet 1 SolutionDocument10 pagesTutorial Sheet 1 Solutionsama abd elgelilNo ratings yet
- Steel Frame Analysis & DesignDocument22 pagesSteel Frame Analysis & DesignjoynaldxNo ratings yet
- Cat 1 Cse 314 2023 - SolutionsDocument4 pagesCat 1 Cse 314 2023 - SolutionsErick Wandu100% (1)
- Scheme of Evaluation for Electrical Machinery Test 1Document2 pagesScheme of Evaluation for Electrical Machinery Test 1Abhijan Carter BiswasNo ratings yet
- CHE145 Gomez, TerradoDocument42 pagesCHE145 Gomez, TerradoRicky JayNo ratings yet
- Calculating bearing capacity of strip footingDocument5 pagesCalculating bearing capacity of strip footingsidiqmuhamadfajarNo ratings yet
- Numerical Integration N6Document23 pagesNumerical Integration N6HayderyNo ratings yet
- سكشن 2 -اساسات2Document21 pagesسكشن 2 -اساسات2Medo NasserNo ratings yet
- Home Assignment 1 - Ersa Berliana - 04211941000041Document6 pagesHome Assignment 1 - Ersa Berliana - 04211941000041roberto luckyNo ratings yet
- Assignment Vibration Et Onds Ex5 PDFDocument3 pagesAssignment Vibration Et Onds Ex5 PDFPhyrun ThanaksithNo ratings yet
- Task 3-Eder - CastañedaDocument12 pagesTask 3-Eder - CastañedaEver Castañeda100% (1)
- Find Velocity and Acceleration of Ladder TopDocument7 pagesFind Velocity and Acceleration of Ladder Topleo besaNo ratings yet
- Central Difference and NewmarkDocument44 pagesCentral Difference and NewmarkKrishna KadiyamNo ratings yet
- Post Task - Final Activity Individual WorkDocument18 pagesPost Task - Final Activity Individual WorkMIGUEL ANGEL AHUMADANo ratings yet
- 4a - Simple Strain StudentsDocument16 pages4a - Simple Strain StudentsGisang IsdaNo ratings yet
- Simene, Jeff Hentzen F., BSME3A-Fundamentals of Deformable Bodies-Ass 4Document6 pagesSimene, Jeff Hentzen F., BSME3A-Fundamentals of Deformable Bodies-Ass 4Jeff Hentzen F. SimeneNo ratings yet
- Set 18 Solution ReviewedDocument14 pagesSet 18 Solution ReviewedMuhammad SuleetNo ratings yet
- 5. PIPING NETWORKS (1)Document14 pages5. PIPING NETWORKS (1)Karel Grace ColotNo ratings yet
- PARAMETER MOTOR 7,5 HP-dikonversiDocument2 pagesPARAMETER MOTOR 7,5 HP-dikonversimas madNo ratings yet
- 2020 Spring MESF5450 E01Document3 pages2020 Spring MESF5450 E01Lit Pao WongNo ratings yet
- Example 1: Two-Way Solid Slab With BeamsDocument24 pagesExample 1: Two-Way Solid Slab With BeamsDavid SanchezNo ratings yet
- Diseñar Un Oscilador Que Cumpla Los Siguientes RequisitosDocument6 pagesDiseñar Un Oscilador Que Cumpla Los Siguientes RequisitosAngelNo ratings yet
- Assignment 5Document4 pagesAssignment 5Daniyal MasoodNo ratings yet
- TAKEHOME 1 - 14 - 12 - 2021 (Solution Theory of Structures) PolimiDocument27 pagesTAKEHOME 1 - 14 - 12 - 2021 (Solution Theory of Structures) PolimiDario GiuaNo ratings yet
- Apparatus and MethodDocument10 pagesApparatus and MethodAli JafariNo ratings yet
- Mini Project Jib Crane DesignDocument9 pagesMini Project Jib Crane Designmohamed.hassan031No ratings yet
- Ex ReviewDocument14 pagesEx ReviewMurtdaNo ratings yet
- HMW1 PDFDocument11 pagesHMW1 PDFeduardolarangeiraNo ratings yet
- Institute of Actuaries of IndiaDocument15 pagesInstitute of Actuaries of IndiaeuticusNo ratings yet
- Solved Problems on Electric Field Intensity EDocument14 pagesSolved Problems on Electric Field Intensity ELikith AkashNo ratings yet
- Maximum earthquake loads on a cantilever beamDocument8 pagesMaximum earthquake loads on a cantilever beamKrisNo ratings yet
- Exam Solution: Zsin ( )Document2 pagesExam Solution: Zsin ( )uipohlklgfNo ratings yet
- Problema 6-23 ShigleyDocument7 pagesProblema 6-23 ShigleylosdesquiciadosNo ratings yet
- Business MathematicsDocument10 pagesBusiness MathematicsDipesh Raj PandeyNo ratings yet
- Task 2 - Electromagnetic Waves in Bounded Open Media: Exercises DevelopmentDocument9 pagesTask 2 - Electromagnetic Waves in Bounded Open Media: Exercises Developmentjavierone xporNo ratings yet
- Reactors design - 1603888, 1599618 i 1603509.docxDocument9 pagesReactors design - 1603888, 1599618 i 1603509.docxsaramartori.2002No ratings yet
- DielectricoDocument3 pagesDielectricoLizz RuizNo ratings yet
- Flexural Design of Prestressed Beams Using Elastic Stresses ExampleDocument5 pagesFlexural Design of Prestressed Beams Using Elastic Stresses ExampleKristan Rae GaetosNo ratings yet
- Week 0Document11 pagesWeek 0RaviJangidNo ratings yet
- QUIZ (Objectives) Identification: - (Residual)Document5 pagesQUIZ (Objectives) Identification: - (Residual)MarlNo ratings yet
- Parameter Motor Induksi 3 Fasa 7,5-hp 220-V Class CDocument2 pagesParameter Motor Induksi 3 Fasa 7,5-hp 220-V Class CMuhammad FarisNo ratings yet
- 332 4 SimpleDocument12 pages332 4 SimpleS HWNo ratings yet
- Taguchi Loss FunctionDocument19 pagesTaguchi Loss FunctionAnjana AshokkumarNo ratings yet
- Tutorial 5 Solution - Topic 3 - PDEs - ans-Q1-Q4Document14 pagesTutorial 5 Solution - Topic 3 - PDEs - ans-Q1-Q4Ibrahim MusaNo ratings yet
- Formulario GasotecniaDocument3 pagesFormulario Gasotecniacarolina presillaNo ratings yet
- Instructor's Manual to Accompany CALCULUS WITH ANALYTIC GEOMETRYFrom EverandInstructor's Manual to Accompany CALCULUS WITH ANALYTIC GEOMETRYNo ratings yet
- Trigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsFrom EverandTrigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsRating: 5 out of 5 stars5/5 (1)
- De Moiver's Theorem (Trigonometry) Mathematics Question BankFrom EverandDe Moiver's Theorem (Trigonometry) Mathematics Question BankNo ratings yet
- Electronic Devices and Circuits OutlineDocument4 pagesElectronic Devices and Circuits OutlinePS N100% (1)
- Experiment No. 01: Operation of Welding Plant Using Transformer 1.1 Learning ObjectiveDocument6 pagesExperiment No. 01: Operation of Welding Plant Using Transformer 1.1 Learning ObjectivePS NNo ratings yet
- Industrial ElectronicsDocument33 pagesIndustrial ElectronicsPS NNo ratings yet
- Lab Manual Industrial ElectronicsDocument81 pagesLab Manual Industrial ElectronicsPS NNo ratings yet
- SI 410 Weighing Indicator User ManualDocument64 pagesSI 410 Weighing Indicator User ManualShehab100% (2)
- 1 PB PDFDocument11 pages1 PB PDFaldo surya pratamaNo ratings yet
- Max Out On Squats Every Day PDFDocument7 pagesMax Out On Squats Every Day PDFsamsung684No ratings yet
- Creating A 3D-Map Using Reference Points: Cfr-19-Stm-CanadasatDocument14 pagesCreating A 3D-Map Using Reference Points: Cfr-19-Stm-Canadasattuguldur bayaraaNo ratings yet
- Sample Weekly Home Learning PlansDocument2 pagesSample Weekly Home Learning PlansJINGKY HUMAMOYNo ratings yet
- GX7000 New CatalogeDocument20 pagesGX7000 New CatalogeyohanesNo ratings yet
- Determination of Equilibrium Constant (KeqDocument0 pagesDetermination of Equilibrium Constant (KeqPablo BernalNo ratings yet
- MRCP EthicsDocument33 pagesMRCP EthicstaherNo ratings yet
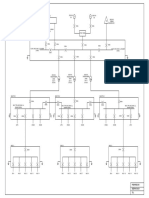
- Conceptual SLDDocument1 pageConceptual SLDakhilNo ratings yet
- Syllabus For TR Supervisors Quality AssurnaceDocument67 pagesSyllabus For TR Supervisors Quality Assurnaceadnanlibra194No ratings yet
- 1Document36 pages1Abrvalg_1No ratings yet
- Telangana Govt T-PRIDE Scheme GuidelinesDocument90 pagesTelangana Govt T-PRIDE Scheme GuidelinesitzprasuNo ratings yet
- 2) Inequality GraphsDocument14 pages2) Inequality Graphsmanobilli30No ratings yet
- Philosophy, Logic, & Rhetoric SyllabusDocument3 pagesPhilosophy, Logic, & Rhetoric SyllabusBrynja KnappNo ratings yet
- Public List Programs by Specialty 460Document9 pagesPublic List Programs by Specialty 460Enta SyngNo ratings yet
- 2021 SC Hurricane GuideDocument16 pages2021 SC Hurricane GuideWMBF News100% (1)
- De-Escalation of Critical Care and Prevention of Iatrogenicity Through PICU Liberation Rounding Process and A Daily Rounding ChecklistDocument1 pageDe-Escalation of Critical Care and Prevention of Iatrogenicity Through PICU Liberation Rounding Process and A Daily Rounding ChecklistdarlingcarvajalduqueNo ratings yet
- ASPE Data Book Volume 1 & 2 - Attachment For Pump Head CalculationDocument2 pagesASPE Data Book Volume 1 & 2 - Attachment For Pump Head CalculationibnrafeeqNo ratings yet
- S6000-Operation-Manual SkyliftDocument50 pagesS6000-Operation-Manual SkyliftSetiawan Tuhu basukiNo ratings yet
- Студената войнаDocument421 pagesСтудената войнаauroradentata0% (1)
- CV Electrical Engineer 2.7 Yrs ExpDocument4 pagesCV Electrical Engineer 2.7 Yrs ExpShams Tabrez0% (1)
- Measuring: TranslateDocument5 pagesMeasuring: Translatechelsea romaidaNo ratings yet
- Industrial Training IntroductionDocument1 pageIndustrial Training Introductionsgurjar07No ratings yet
- Runningrate Asiaking Juli'23Document32 pagesRunningrate Asiaking Juli'23cecilia ivadaaNo ratings yet
- Boiler BlowdownDocument2 pagesBoiler BlowdownbaratheonNo ratings yet
- Group 3 Safety Issues in ICTDocument15 pagesGroup 3 Safety Issues in ICTRoseAnnNo ratings yet
- Guillaume Apollinaire-Alcools (Athlone French Poets) (French Edition) (2001)Document195 pagesGuillaume Apollinaire-Alcools (Athlone French Poets) (French Edition) (2001)Antonio Scalia100% (5)