You might also like
- Non Linear SystemDocument18 pagesNon Linear SystemShihab KvNo ratings yet
- Relay With Hysteresis & Dead Zone, Saturations / Coulomb Friction & BackslashDocument12 pagesRelay With Hysteresis & Dead Zone, Saturations / Coulomb Friction & Backslashfarah haniNo ratings yet
- Characteristics of Non-Linear SystemsDocument24 pagesCharacteristics of Non-Linear SystemsCarlynMNo ratings yet
- 2 BasicsIntroduction To Electromechanical RelaysDocument26 pages2 BasicsIntroduction To Electromechanical RelaysArpon BoseNo ratings yet
- Dynamics of Power Systems: Ian A. HiskensDocument40 pagesDynamics of Power Systems: Ian A. HiskensRahul Kumar ChauhanNo ratings yet
- CS Chapter 8Document113 pagesCS Chapter 8Mynam MeghanaNo ratings yet
- Digital Protection 2017Document128 pagesDigital Protection 2017Anonymous DbmKEDxNo ratings yet
- Module Title: Vibrations Module Code: Mee 3263Document26 pagesModule Title: Vibrations Module Code: Mee 3263Mï XavierNo ratings yet
- Power System HarmonicsDocument57 pagesPower System HarmonicsAbdul Noman AbbasiNo ratings yet
- Ece113 Lec18 OscillatorsDocument29 pagesEce113 Lec18 Oscillators許耕立No ratings yet
- 26 Sequential Logic Circuit Introduction 18-02-2023Document14 pages26 Sequential Logic Circuit Introduction 18-02-2023Back upNo ratings yet
- Nonlinear System Analysis-1 PDFDocument12 pagesNonlinear System Analysis-1 PDFVishal BiswakarmaNo ratings yet
- Protection & SwitchgearDocument50 pagesProtection & SwitchgearvnrsamyNo ratings yet
- Background PDFDocument44 pagesBackground PDFAzImmNo ratings yet
- Non LinearDocument79 pagesNon Linearmegumifushiguro1022No ratings yet
- Unit - Ii Switching TransientsDocument42 pagesUnit - Ii Switching Transientsshree100% (5)
- Low Frequency TransientsDocument26 pagesLow Frequency TransientsJosNo ratings yet
- A Presentation On Symmetrical FaultsDocument20 pagesA Presentation On Symmetrical FaultsJacobNo ratings yet
- Voltage Mode ControlDocument32 pagesVoltage Mode Controlvivek saiNo ratings yet
- Chapter 6 PPT - NewDocument66 pagesChapter 6 PPT - NewkalehiwotkoneNo ratings yet
- Lesson 2 Oscillators-1Document29 pagesLesson 2 Oscillators-1SolomonNo ratings yet
- GeneratorDocument27 pagesGeneratorWoldemariam WorkuNo ratings yet
- PE452 - Lect13 - Distance Protection of Transmission LinesDocument44 pagesPE452 - Lect13 - Distance Protection of Transmission LinesZallan KhanNo ratings yet
- Power Quality 101Document129 pagesPower Quality 101BochiNo ratings yet
- Protection of Synchronous Generator: Thesis SupervisorDocument37 pagesProtection of Synchronous Generator: Thesis SupervisorIrfan Naqvi100% (1)
- El G 4125 Symmetrical FaultsDocument15 pagesEl G 4125 Symmetrical FaultsdjebienNo ratings yet
- CLUSTER V Stability AnalysisDocument120 pagesCLUSTER V Stability AnalysisVinayaniv YanivNo ratings yet
- Generator ProtectionDocument23 pagesGenerator ProtectionstmeuNo ratings yet
- PE452 - Lect11 - Transformer ProtectionDocument28 pagesPE452 - Lect11 - Transformer ProtectionZallan Khan100% (1)
- Synchronous MachineDocument34 pagesSynchronous Machinefakeacc04aNo ratings yet
- SGP PPT1Document100 pagesSGP PPT1Anley NigissieNo ratings yet
- Caterpillar Speed Sensor Principles and OperationDocument31 pagesCaterpillar Speed Sensor Principles and OperationCharles HornNo ratings yet
- Unit 4. Asynchronous (Or Induction) MachinesDocument40 pagesUnit 4. Asynchronous (Or Induction) MachinesAgustinBenedictoNo ratings yet
- 2016 09-27-3 Generator Advanced Concepts 1Document44 pages2016 09-27-3 Generator Advanced Concepts 1Jake AbanteNo ratings yet
- Mod 1Document39 pagesMod 1hkaruvathilNo ratings yet
- CH 4 5 Sequinital NewDocument65 pagesCH 4 5 Sequinital NewjoNo ratings yet
- Mi Unit IiDocument131 pagesMi Unit IiNithish kumar RajendranNo ratings yet
- Three Phase Synchronous MachinesDocument41 pagesThree Phase Synchronous MachinesMausam BasnetNo ratings yet
- 8 TransientsDocument36 pages8 TransientsJodNo ratings yet
- Cathode Ray Oscilloscope Unit-IDocument23 pagesCathode Ray Oscilloscope Unit-ISwati DixitNo ratings yet
- 06 Small Signal Angle StabilityDocument160 pages06 Small Signal Angle Stabilitysulemankhalid0% (1)
- ENSC 387 Sensors and ActuatorsDocument117 pagesENSC 387 Sensors and ActuatorsMajed KawamNo ratings yet
- PSP T1Document64 pagesPSP T1tg hgNo ratings yet
- Cathode Ray OscillatorDocument68 pagesCathode Ray Oscillatorutadaneelimadeviutada0% (1)
- Radio Frequency CircuitsDocument29 pagesRadio Frequency CircuitsNano Gomesh100% (2)
- Transeducer Lab Part 1Document41 pagesTranseducer Lab Part 1Yasser IsteitiehNo ratings yet
- Symmetrical 3 Phase FaultsDocument34 pagesSymmetrical 3 Phase FaultsMSGNo ratings yet
- 06 Small Signal Angle StabilityDocument160 pages06 Small Signal Angle StabilityAnonymous 48HbyFUSDNo ratings yet
- Chapter 3 - OscillatorDocument19 pagesChapter 3 - Oscillatormae beronNo ratings yet
- Chapter 3 - OscillatorDocument50 pagesChapter 3 - OscillatorJ A P SNo ratings yet
- Unit - IIDocument35 pagesUnit - IIthota nagajyothiNo ratings yet
- Power Quality & Electrical FaultDocument58 pagesPower Quality & Electrical FaultBikash RoutNo ratings yet
- Feedback OscillatorsDocument27 pagesFeedback OscillatorsAlex William JohnNo ratings yet
- Introduction To Design: Refer Textbook Control Systems Engineering by Nagrath, GopalDocument49 pagesIntroduction To Design: Refer Textbook Control Systems Engineering by Nagrath, GopalDeepthiNo ratings yet
- Vibration Torsion TestingDocument30 pagesVibration Torsion TestingJu ZopoNo ratings yet
- PSG Module IIDocument47 pagesPSG Module IIDr. Srinivas MNo ratings yet
- Minicircuits VCO FundamentalsDocument62 pagesMinicircuits VCO Fundamentalsaleksandra4080No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Remote Desktop Environment (Real VNC Version 4.1.1) : Server TuningDocument8 pagesRemote Desktop Environment (Real VNC Version 4.1.1) : Server TuningMin ZayarNo ratings yet
- Apache Web Server Myanmar VersionDocument2 pagesApache Web Server Myanmar VersionHRmyanmarNo ratings yet
- Heat Balance Cement IndustryDocument1 pageHeat Balance Cement IndustryMin ZayarNo ratings yet
- Win2003 DHCP PDFDocument3 pagesWin2003 DHCP PDFMin ZayarNo ratings yet
- What Is An IP AddressDocument6 pagesWhat Is An IP AddressAung ZinNo ratings yet
- Menu 2Document12 pagesMenu 2Min ZayarNo ratings yet
- 1 Menu 1 Parameter Descriptions: Reference Update RateDocument12 pages1 Menu 1 Parameter Descriptions: Reference Update RateMin ZayarNo ratings yet
- 02-PLC (Forms of Signal) PDFDocument14 pages02-PLC (Forms of Signal) PDFMin ZayarNo ratings yet
- 2 Unidrive Keypad and Display: 1 2 3.4 5 6 AbcdDocument8 pages2 Unidrive Keypad and Display: 1 2 3.4 5 6 AbcdMin ZayarNo ratings yet
- Unidrive: Advanced User GuideDocument2 pagesUnidrive: Advanced User GuideMin ZayarNo ratings yet
- Unit 21799p P.L.C. IIIDocument10 pagesUnit 21799p P.L.C. IIIcataiceNo ratings yet
- Unit 21799p P.L.C. ViDocument8 pagesUnit 21799p P.L.C. VicataiceNo ratings yet
- 1 Unidrive Menus and Parameters: 1.1 Menu and Parameter StructureDocument6 pages1 Unidrive Menus and Parameters: 1.1 Menu and Parameter StructureMin ZayarNo ratings yet
- Cs1-Series Cpu Units: Fast and Powerful Cpus For Any TaskDocument6 pagesCs1-Series Cpu Units: Fast and Powerful Cpus For Any TaskMin ZayarNo ratings yet
- Single Time Range Timer: DIN Size W48×H48mm Solid State ON Delay TimerDocument3 pagesSingle Time Range Timer: DIN Size W48×H48mm Solid State ON Delay TimerMin MCLNo ratings yet
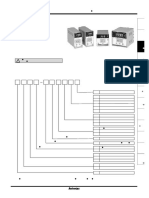
- TZN/TZ Series: Dual PID Auto Tuning ControllerDocument16 pagesTZN/TZ Series: Dual PID Auto Tuning ControllerMin ZayarNo ratings yet
- AT8PSNDocument3 pagesAT8PSNMin MCLNo ratings yet
- Board Type Temperature ControllerDocument2 pagesBoard Type Temperature ControllerMin ZayarNo ratings yet
- AT8SDNDocument3 pagesAT8SDNMin MCLNo ratings yet
- T4WMDocument3 pagesT4WMMin ZayarNo ratings yet
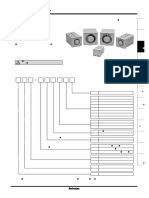
- Dual Setting Type, High Accuracy Temperature Controller: T4 LP 3 R P 4 C BDocument4 pagesDual Setting Type, High Accuracy Temperature Controller: T4 LP 3 R P 4 C BMin ZayarNo ratings yet
- Dial Setting /deviation Setting Type: Analog and Non Indication Type, Set Temperature by DialDocument4 pagesDial Setting /deviation Setting Type: Analog and Non Indication Type, Set Temperature by DialMin ZayarNo ratings yet
- T3ha H3HS T4ma T4laDocument5 pagesT3ha H3HS T4ma T4laMin ZayarNo ratings yet
- Dual Setting Type, High Accuracy Temperature Controller: T4 LP 3 R P 4 C BDocument4 pagesDual Setting Type, High Accuracy Temperature Controller: T4 LP 3 R P 4 C BMin ZayarNo ratings yet
- T3S/T3H/T4M/T4L: Digital Switch Setting Type, Temperature ControllerDocument5 pagesT3S/T3H/T4M/T4L: Digital Switch Setting Type, Temperature ControllerMin ZayarNo ratings yet
- T3NI/T4YI/T4WI/T3SI/T3HI/T4MI/T4LI: Indication Type Only, Various SizesDocument5 pagesT3NI/T4YI/T4WI/T3SI/T3HI/T4MI/T4LI: Indication Type Only, Various SizesMin ZayarNo ratings yet
- LR7NDocument2 pagesLR7NMin ZayarNo ratings yet
- Pulse (Rate) Meter: FeaturesDocument23 pagesPulse (Rate) Meter: FeaturesMin ZayarNo ratings yet
- SCM 38iDocument2 pagesSCM 38iMin ZayarNo ratings yet
- FC 05:0AH9: 509jah Fge?G9C9:B Ceiaed Edigebb GDocument5 pagesFC 05:0AH9: 509jah Fge?G9C9:B Ceiaed Edigebb GMin ZayarNo ratings yet
- Electric EquipmentDocument170 pagesElectric Equipmentslam9No ratings yet
- Transmission Lines (Complete)Document14 pagesTransmission Lines (Complete)Floyd SampianoNo ratings yet
- User Manual ERER 3Document16 pagesUser Manual ERER 3aleksandrNo ratings yet
- Exp3 (Study of DSB-SC Modulation)Document6 pagesExp3 (Study of DSB-SC Modulation)TA Tius100% (1)
- Generator 3412 Set Prime Power Caterpillar EngineDocument7 pagesGenerator 3412 Set Prime Power Caterpillar Enginemoussa100% (3)
- Fortiap AccessoriesDocument8 pagesFortiap AccessoriesIvan KasparekNo ratings yet
- System Protection Chapter 2Document19 pagesSystem Protection Chapter 2Almiqdad AldeekNo ratings yet
- Installation Manual Inmarsat-C Mes Felcom18: ModelDocument62 pagesInstallation Manual Inmarsat-C Mes Felcom18: Modelsrinu19840% (1)
- AH Deluxe ManualDocument7 pagesAH Deluxe ManualJacimário Bonfim Santos'No ratings yet
- 4.principle of SuperpositionDocument71 pages4.principle of SuperpositionAbhishek JhaNo ratings yet
- Mutual Coupling Suppression in Antenna Arrays UsinDocument8 pagesMutual Coupling Suppression in Antenna Arrays Usinyoussef.amraoui2No ratings yet
- LEARJET 45 AC Electrical SystemDocument4 pagesLEARJET 45 AC Electrical SystemRAFAEL MANZANILLANo ratings yet
- 75-42rD Impulse Manual Mar2003 PDFDocument23 pages75-42rD Impulse Manual Mar2003 PDFLeandro MussoNo ratings yet
- LimiterDocument2 pagesLimiterBoedi SetijoNo ratings yet
- Troubleshooting 1Document15 pagesTroubleshooting 1ANURAG SHARMA100% (1)
- MicPreamp Print PubDocument2 pagesMicPreamp Print Pubapi-12922547100% (1)
- PCM56P PCM56U: FeaturesDocument18 pagesPCM56P PCM56U: Featurestrinh_anhtuNo ratings yet
- Manual Logitech X-230 SpeakersDocument9 pagesManual Logitech X-230 SpeakersAnonymous qrSsYuxyoYNo ratings yet
- Dinamono Motorav - m28n - 3 - eDocument1 pageDinamono Motorav - m28n - 3 - eSaiful SubariNo ratings yet
- bq2415x Fully Integrated Switch-Mode One-Cell Li-Ion Charger With Full USB Compliance and USB-OTG SupportDocument52 pagesbq2415x Fully Integrated Switch-Mode One-Cell Li-Ion Charger With Full USB Compliance and USB-OTG SupportJungkook JeonNo ratings yet
- Ixys P-Channel Power Mosfets and Applications Abdus Sattar, Kyoung-Wook Seok, Ixan0064Document14 pagesIxys P-Channel Power Mosfets and Applications Abdus Sattar, Kyoung-Wook Seok, Ixan0064Kikuvi JohnNo ratings yet
- 341440983-Valkyrie Soundl PDFDocument2 pages341440983-Valkyrie Soundl PDFAnonymous YWmB9HDgNo ratings yet
- Sun2000 50KTL M0Document2 pagesSun2000 50KTL M0Abhishek WadhwaNo ratings yet
- EE 442 Homework #1: Problem 1 Wavelengths in Radio Applications (15 Points)Document6 pagesEE 442 Homework #1: Problem 1 Wavelengths in Radio Applications (15 Points)AsadRasheedNo ratings yet
- SurgeX SU-1000Li UPS Owners Manual (60483)Document9 pagesSurgeX SU-1000Li UPS Owners Manual (60483)Rob Seaman - PJSNo ratings yet
- 10D 23 ABB AC227 Concept BS 2 GangSwitched SocketDocument2 pages10D 23 ABB AC227 Concept BS 2 GangSwitched Socketwaleed.murad@gmail.comNo ratings yet
- Lec29 - 32 - FET Application PDFDocument86 pagesLec29 - 32 - FET Application PDFRichard ParkerNo ratings yet
- WaveLab - BUC Datasheet - Ku Band 80W 100WDocument4 pagesWaveLab - BUC Datasheet - Ku Band 80W 100WLeonNo ratings yet
- Cat Transferswitchsircom enDocument4 pagesCat Transferswitchsircom enWira Nur IndrawanNo ratings yet
- Service Manual PFR82GDocument18 pagesService Manual PFR82GliderfgvNo ratings yet