You might also like
- Mathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsFrom EverandMathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsNo ratings yet
- Solution of Ordinary Differential Equations (Computing) : School of Chemical and Biomedical EngineeringDocument12 pagesSolution of Ordinary Differential Equations (Computing) : School of Chemical and Biomedical EngineeringVenus LimNo ratings yet
- Lesson 3 Math 311Document22 pagesLesson 3 Math 311mc604011No ratings yet
- Lesson 13Document7 pagesLesson 13Jayron John Puguon AquinoNo ratings yet
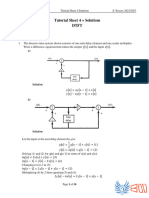
- Tutorial 4 SolutionsDocument10 pagesTutorial 4 Solutionssama abd elgelilNo ratings yet
- BYJU'S Home Learning Program: Daily Practice ProblemsDocument5 pagesBYJU'S Home Learning Program: Daily Practice ProblemsJagdamba prasad yadavNo ratings yet
- Lectures 04 PDFDocument7 pagesLectures 04 PDFNazeer AlyasNo ratings yet
- 1 Linearization: Linearization ForDocument2 pages1 Linearization: Linearization ForFahmi AlfaNo ratings yet
- Worksheet Solution 1Document9 pagesWorksheet Solution 1abdelrahmanhelal13No ratings yet
- Techniques of IntegrationDocument7 pagesTechniques of IntegrationMero MahmoudNo ratings yet
- Finite Difference Methods For Two-Point Boundary Value Prob-LemsDocument3 pagesFinite Difference Methods For Two-Point Boundary Value Prob-LemsasasdNo ratings yet
- Ass# 2 NC G-IV Solved PDFDocument8 pagesAss# 2 NC G-IV Solved PDFkashfmalikNo ratings yet
- Functions AutosavedDocument60 pagesFunctions Autosavedblackhawk402905No ratings yet
- Ordinary Differential Equations I Lecture (4) First Order Differential EquationsDocument7 pagesOrdinary Differential Equations I Lecture (4) First Order Differential EquationsWisal muhammedNo ratings yet
- Solutions To Difference EquationsDocument22 pagesSolutions To Difference EquationsKenneth LandichoNo ratings yet
- HMW1 PDFDocument11 pagesHMW1 PDFeduardolarangeiraNo ratings yet
- Solution GuideDocument7 pagesSolution GuideCamilo ChaparroNo ratings yet
- Coe 102 Differentiation Rules Lesson 3Document9 pagesCoe 102 Differentiation Rules Lesson 3Jethro CunananNo ratings yet
- GM1. Intro To FunctionsDocument5 pagesGM1. Intro To FunctionsGabriel Benedict DacanayNo ratings yet
- Chapter Seven: Solution of Pdes. by Using Finite Difference Method 7.1 Partial Differential EquationsDocument10 pagesChapter Seven: Solution of Pdes. by Using Finite Difference Method 7.1 Partial Differential EquationsMohamed MuayidNo ratings yet
- Lesson 4.2 IVT and EVTDocument4 pagesLesson 4.2 IVT and EVTClyde EmmanuelNo ratings yet
- Multistep Methods: Appendix IDocument24 pagesMultistep Methods: Appendix Imukarram169No ratings yet
- Linear Transformations: DefinitionsDocument22 pagesLinear Transformations: DefinitionsMiral ElnakibNo ratings yet
- Bprmo 2023vvaDocument4 pagesBprmo 2023vvaDevarsh PatelNo ratings yet
- Lecture 1Document8 pagesLecture 1waleedNo ratings yet
- Solving SLE Using CramerDocument9 pagesSolving SLE Using CramerAbebayehu YohannesNo ratings yet
- Introduction, Linear EquationDocument8 pagesIntroduction, Linear Equationfaaizashiq72No ratings yet
- Distance Formula Midpoint FormulaDocument6 pagesDistance Formula Midpoint FormulaMilkie MangaoilNo ratings yet
- Lecture Three Solution of Systems of Nonlinear EquationsDocument4 pagesLecture Three Solution of Systems of Nonlinear Equationsmuqtada.fadhilNo ratings yet
- Numerical DifferentiationDocument4 pagesNumerical DifferentiationDiwas RaiNo ratings yet
- MTN 6 Module 4 CPEDocument8 pagesMTN 6 Module 4 CPEJohnrey RaquidanNo ratings yet
- Are Taken at Equidistance That Is,: Chapter Four Finite DifferencesDocument9 pagesAre Taken at Equidistance That Is,: Chapter Four Finite DifferencesEyob HabteNo ratings yet
- Numerical Integration N6Document23 pagesNumerical Integration N6HayderyNo ratings yet
- Lecture 09 PDFDocument37 pagesLecture 09 PDFwilliam matosNo ratings yet
- Chapter 1 The Integral ConceptDocument20 pagesChapter 1 The Integral ConceptKasai KristineNo ratings yet
- Iqra Nazir@ucp Edu PKDocument7 pagesIqra Nazir@ucp Edu PKAMIR ALINo ratings yet
- Exercise Section 1.3Document8 pagesExercise Section 1.3adelinameidy75% (4)
- Mata 33Document37 pagesMata 33Aissatou FallNo ratings yet
- Assignment 3 AnswerDocument31 pagesAssignment 3 AnswerdinaNo ratings yet
- Functions, Graphs, and Limits: By: Husni Tel: 0615257175 Alas Tel: 0615521558Document56 pagesFunctions, Graphs, and Limits: By: Husni Tel: 0615257175 Alas Tel: 0615521558Abdalla ShowNo ratings yet
- Olacao, Ariel C. Bsed-Math 3ADocument4 pagesOlacao, Ariel C. Bsed-Math 3AAriel OlacaoNo ratings yet
- Unit 1Document64 pagesUnit 1Aditya YadavNo ratings yet
- Module 2 - Integral TransformsDocument22 pagesModule 2 - Integral TransformsMd Esteyak alam KhanNo ratings yet
- Homework 3 Total Points: 30Document2 pagesHomework 3 Total Points: 30Rayhan KabirNo ratings yet
- Assignment Numerical Analysis: TopicDocument11 pagesAssignment Numerical Analysis: TopicLaiba LaibaNo ratings yet
- TB ch2Document58 pagesTB ch2Wasiu BabsNo ratings yet
- Day-11: Section 13.7 Tangent Planes and Normal VectorsDocument13 pagesDay-11: Section 13.7 Tangent Planes and Normal VectorsFaizaNo ratings yet
- 10.1 Introduction To Complex NumbersDocument44 pages10.1 Introduction To Complex NumbersasfafafNo ratings yet
- Lecture 8 - Solving de Using Power SeriesDocument6 pagesLecture 8 - Solving de Using Power SeriesMark Joseph PanongNo ratings yet
- Ch-3 & 4 Solving System of EquationsDocument18 pagesCh-3 & 4 Solving System of EquationsAbel TayeNo ratings yet
- Unit III Session 07Document11 pagesUnit III Session 07K.A.S.S PereraNo ratings yet
- Lec 4 Equation of PlaneDocument6 pagesLec 4 Equation of PlaneMahad ElahiNo ratings yet
- Homework 2 PDFDocument6 pagesHomework 2 PDF鄧新弘No ratings yet
- Ex 7 - SolutionDocument15 pagesEx 7 - SolutionAmiya Biswas100% (3)
- Chapter 1Document80 pagesChapter 1eshwariNo ratings yet
- AEMN04E - Topic 1 (1.1-1.7) - Complex NumbersDocument15 pagesAEMN04E - Topic 1 (1.1-1.7) - Complex NumbersEmmanuelle De MesaNo ratings yet
- Summary of FormulasDocument5 pagesSummary of FormulasMaria Monica Mae MirandaNo ratings yet
- Quiz3 SolutionDocument3 pagesQuiz3 Solution張育安No ratings yet
- Remarks On Chapter 5 in L. Trefethen: Spectral Methods in MATLABDocument8 pagesRemarks On Chapter 5 in L. Trefethen: Spectral Methods in MATLABTri NguyenNo ratings yet
- Algebraic SubstitutionDocument6 pagesAlgebraic SubstitutionIchiroue Whan GNo ratings yet
- Optimal Control Dynamic ProgrammingDocument18 pagesOptimal Control Dynamic ProgrammingPuloma DwibediNo ratings yet
- Factorisation PDFDocument3 pagesFactorisation PDFRaj Kumar0% (1)
- All Optimum Design Algorithms Require A Starting Point To Initiate The Iterative Process. FalseDocument1 pageAll Optimum Design Algorithms Require A Starting Point To Initiate The Iterative Process. FalseJerin Abraham IssacNo ratings yet
- The ORCA Quantum Chemistry Program: A Jump-Start GuideDocument6 pagesThe ORCA Quantum Chemistry Program: A Jump-Start GuideFerzz MontejoNo ratings yet
- 10 MathDocument5 pages10 MathOver LordNo ratings yet
- CSE Deep Learning Seminar ReportDocument4 pagesCSE Deep Learning Seminar ReportRaj JhaNo ratings yet
- 4 Bisection MethodDocument30 pages4 Bisection MethodKenNo ratings yet
- EE178/EE278A: Regression (From Least Squares To Non-Parametric)Document66 pagesEE178/EE278A: Regression (From Least Squares To Non-Parametric)Moh3nMoNo ratings yet
- Fast Fourier Transform On HexagonsDocument7 pagesFast Fourier Transform On HexagonsYufangNo ratings yet
- AIDocument2 pagesAIPriya PreethiNo ratings yet
- Chap 03Document32 pagesChap 03Khalid F AbdulraheemNo ratings yet
- Back Propagation AlgorithmDocument13 pagesBack Propagation AlgorithmHerald RufusNo ratings yet
- Mnist CNN - Ipynb ColaboratoryDocument5 pagesMnist CNN - Ipynb ColaboratorySai Raj LgtvNo ratings yet
- Previous Year Boards Questions: Chapter 2 - PolynomialsDocument2 pagesPrevious Year Boards Questions: Chapter 2 - PolynomialsASgroup NasirabadNo ratings yet
- Lill's MethodDocument2 pagesLill's MethodAniruddha SinghalNo ratings yet
- Wha1.3, Mom Bailey DewsnapDocument21 pagesWha1.3, Mom Bailey DewsnapBailey DewsnapNo ratings yet
- Batch NormalizationDocument2 pagesBatch NormalizationgjhfgjfgjNo ratings yet
- Lectures Part - 3 (Lagrange Method)Document9 pagesLectures Part - 3 (Lagrange Method)Anirudh Kumar vermaNo ratings yet
- Non Linear Programming ProblemsDocument66 pagesNon Linear Programming Problemsbits_who_am_iNo ratings yet
- Optimization Lectures 1Document15 pagesOptimization Lectures 1Debdas GhoshNo ratings yet
- Me4126d Optimization Methods in EngineeringDocument8 pagesMe4126d Optimization Methods in EngineeringSankaranarayanan ANo ratings yet
- Sureshpareth: 1.1 Gauss Elimination Method For Solving System of EquationsDocument8 pagesSureshpareth: 1.1 Gauss Elimination Method For Solving System of EquationsSuresh ParethNo ratings yet
- Math 10 Q2 W1 Las1Document11 pagesMath 10 Q2 W1 Las1Hase PiNo ratings yet
- Cholesky DecompositionDocument4 pagesCholesky DecompositionislamNo ratings yet
- Soln AC09Document46 pagesSoln AC09AdzLinkBalaoangNo ratings yet
- 1Document2 pages1Keith D'souzaNo ratings yet
- Assignment 2Document2 pagesAssignment 2Lokesh Kumar GuptaNo ratings yet
- W Wor Orks Ksho Hop 08 P08 Iintrod Ntroductio Uction To Proce N To Process Ss O Opt Ptim Imiza Izati Tion On Iin NG Gams Ams® ®Document29 pagesW Wor Orks Ksho Hop 08 P08 Iintrod Ntroductio Uction To Proce N To Process Ss O Opt Ptim Imiza Izati Tion On Iin NG Gams Ams® ®franko2422No ratings yet
- Moment Distribution MethodDocument22 pagesMoment Distribution Methodyoi82No ratings yet