You might also like
- Predictive Functional Control: J.Richalet 2015Document40 pagesPredictive Functional Control: J.Richalet 2015Rajesh SudiNo ratings yet
- Process Control Design ProjectDocument4 pagesProcess Control Design Projectds2228No ratings yet
- Calculating Temperature Change for Adiabatic Expansion of GasDocument3 pagesCalculating Temperature Change for Adiabatic Expansion of GasAkib ImtihanNo ratings yet
- THERMODYNAMICS EQUATIONSDocument11 pagesTHERMODYNAMICS EQUATIONSAnthony MacalindongNo ratings yet
- Compressible Flow Through Nozzles and Diffusers: V DT V D V VDocument14 pagesCompressible Flow Through Nozzles and Diffusers: V DT V D V VCamilo SantacruzNo ratings yet
- PFinal IME 8310-2020-30 - RemoteDocument6 pagesPFinal IME 8310-2020-30 - RemoteWilliam Alejandro Contreras MaestreNo ratings yet
- Chemical Engineering Thermodynamics (CHE 303) : Kfupm - Edu.saDocument95 pagesChemical Engineering Thermodynamics (CHE 303) : Kfupm - Edu.sai 3l3jNo ratings yet
- UNIT # 06: Thermodynamics Exercise # 1Document10 pagesUNIT # 06: Thermodynamics Exercise # 1MehulMohanNo ratings yet
- Hydrology - Collection of Formulas-: (Aid For The Exam and The Assignments)Document21 pagesHydrology - Collection of Formulas-: (Aid For The Exam and The Assignments)HectorAbelAstocazaGNo ratings yet
- Termodinamica ch03Document35 pagesTermodinamica ch03Rebeca AlmeidaNo ratings yet
- CARNOT CYCLE EFFICIENCY AND MEAN PRESSUREDocument6 pagesCARNOT CYCLE EFFICIENCY AND MEAN PRESSUREclarkmaxNo ratings yet
- Matlab CodeDocument5 pagesMatlab CodeSri Varalakshmi MummidiNo ratings yet
- CHME 314 Lecture 13 Collection and Analysis of Rate Data 1Document34 pagesCHME 314 Lecture 13 Collection and Analysis of Rate Data 1AmroKashtNo ratings yet
- Michael Hess Department of Physical Chemistry University Duisburg-Essen Campus Duisburg 47048 Duisburg, Germany E-Mail: Hi259he@uni-Duisburg - deDocument18 pagesMichael Hess Department of Physical Chemistry University Duisburg-Essen Campus Duisburg 47048 Duisburg, Germany E-Mail: Hi259he@uni-Duisburg - deAnand GuptaNo ratings yet
- Lec 3Document11 pagesLec 3조기현/초빙교수/스마트소재부품공학No ratings yet
- Equation Sheet: Boyang Qin Date Created: Jan 2013Document3 pagesEquation Sheet: Boyang Qin Date Created: Jan 2013Boyang QinNo ratings yet
- Slides Robin AutotuningDocument19 pagesSlides Robin AutotuningJorge MunozNo ratings yet
- 4 EngineCyclesAnalysisDocument9 pages4 EngineCyclesAnalysisNatthaphon NaosookNo ratings yet
- Fisicoquímica Ii: Alumnos: Saúl Garduño BenítezDocument1 pageFisicoquímica Ii: Alumnos: Saúl Garduño BenítezSaúl GarduñoNo ratings yet
- MCHE 562 Internal Combustion Engine and Turbomachinery SyllabusDocument159 pagesMCHE 562 Internal Combustion Engine and Turbomachinery SyllabusWalid MohammedNo ratings yet
- CHEM F211 Physical Chemistry-I: Entropy and the Second Law of ThermodynamicsDocument28 pagesCHEM F211 Physical Chemistry-I: Entropy and the Second Law of ThermodynamicsHRIDAY MAHESHWARINo ratings yet
- Closed Loop Part 1Document12 pagesClosed Loop Part 1Lutfia KhasanahNo ratings yet
- PHYSICAL CHEMISTRY FOR ENGINEERING 2Document19 pagesPHYSICAL CHEMISTRY FOR ENGINEERING 2trades korNo ratings yet
- Lecture 01Document30 pagesLecture 01Diane ClaireNo ratings yet
- Final Exam MockDocument11 pagesFinal Exam Mockb8vfdrjff6No ratings yet
- PID Controller Theory and Practical DemonstrationDocument13 pagesPID Controller Theory and Practical DemonstrationDwightFerrer67% (3)
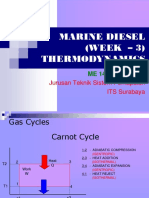
- Marine Diesel (WEEK - 3) Thermodynamics: Jurusan Teknik Sistem Perkapalan ITS SurabayaDocument38 pagesMarine Diesel (WEEK - 3) Thermodynamics: Jurusan Teknik Sistem Perkapalan ITS SurabayafaridNo ratings yet
- 7 Limited Pressure CycleDocument4 pages7 Limited Pressure CyclecaptainhassNo ratings yet
- Lecture - 7 - First LawDocument9 pagesLecture - 7 - First LawMihai MirceaNo ratings yet
- Heat, Thermodynamics:: o Heat Current in RadiationDocument6 pagesHeat, Thermodynamics:: o Heat Current in Radiationkashawna fujiwaraNo ratings yet
- mcl141 30 31Document30 pagesmcl141 30 31Shruti GuptaNo ratings yet
- 3 Ideal Models of Engine Processes and CyclesDocument58 pages3 Ideal Models of Engine Processes and Cyclesdinosaur x-drakeNo ratings yet
- ThermodynamicsDocument16 pagesThermodynamicsMuhammad zidanNo ratings yet
- Unit 2 First Law-Closed System ProblemsDocument11 pagesUnit 2 First Law-Closed System Problemspiravi66No ratings yet
- Rubber band thermodynamicsDocument10 pagesRubber band thermodynamicsChafey MuNo ratings yet
- Introduction To Olecular Ynamics Simulations Using: M D LammpsDocument86 pagesIntroduction To Olecular Ynamics Simulations Using: M D Lammpskroidman100% (2)
- Thermo Formula SheetDocument1 pageThermo Formula SheetdoubletaprNo ratings yet
- THERMO1 Formula SheetDocument7 pagesTHERMO1 Formula SheetNyahaha HahahNo ratings yet
- Volumetric PropertiesDocument36 pagesVolumetric PropertiesRohan BhilkarNo ratings yet
- Colorado School of Mines CHEN403: 1 Where MinDocument12 pagesColorado School of Mines CHEN403: 1 Where MinpoopoophoNo ratings yet
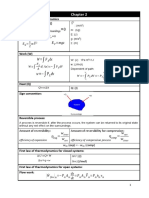
- Chapter 2 FormulasDocument6 pagesChapter 2 FormulasShellyNo ratings yet
- Thermodynamic Vapour Cycles ExplainedDocument16 pagesThermodynamic Vapour Cycles ExplainedKALYAMPUDI MANOHARNo ratings yet
- REVIEWER Cheat CodeDocument1 pageREVIEWER Cheat CodeJohn Rhey ChavezNo ratings yet
- 9 Special123Document13 pages9 Special123lizarazojavierNo ratings yet
- Determination of Rate EquationDocument16 pagesDetermination of Rate Equationrachita pandeyNo ratings yet
- DatasheetDocument2 pagesDatasheetjoseNo ratings yet
- Formulae and Periodic TableDocument2 pagesFormulae and Periodic TableVal Thi VanNo ratings yet
- Review: Nonideal Flow in A CSTRDocument49 pagesReview: Nonideal Flow in A CSTRFebrianti FitrianiNo ratings yet
- Lecture 5 - Gas Turbine EnginesDocument11 pagesLecture 5 - Gas Turbine EnginesShailani HossainNo ratings yet
- Uses of Maxwell RelationsDocument17 pagesUses of Maxwell RelationsArun EbenezerNo ratings yet
- Calungsod CaseStudyHeatExchangerDocument10 pagesCalungsod CaseStudyHeatExchangerTjing AlmasaNo ratings yet
- Quiz 1 - MA SolutionsDocument6 pagesQuiz 1 - MA SolutionsabullaNo ratings yet
- Use of Advanced Educational Technologies in A Process Simulation CourseDocument22 pagesUse of Advanced Educational Technologies in A Process Simulation CourseShreyank Deepali GoelNo ratings yet
- Unit One and ThreeDocument32 pagesUnit One and ThreeGAURAV RATHORENo ratings yet
- Understanding jet engine thermodynamicsDocument7 pagesUnderstanding jet engine thermodynamicsChafey MuNo ratings yet
- Solution Manual for an Introduction to Equilibrium ThermodynamicsFrom EverandSolution Manual for an Introduction to Equilibrium ThermodynamicsNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Handbook of Heating, Ventilating and Air ConditioningFrom EverandHandbook of Heating, Ventilating and Air ConditioningRating: 4 out of 5 stars4/5 (6)
- 1 s2.0 S1319157820303323 MainDocument14 pages1 s2.0 S1319157820303323 MainRajesh SudiNo ratings yet
- Python Training Syllabus in ACTEDocument4 pagesPython Training Syllabus in ACTERajesh SudiNo ratings yet
- Eaap8674 FullDocument12 pagesEaap8674 FullRajesh SudiNo ratings yet
- MatlabDocument5 pagesMatlabRajesh SudiNo ratings yet
- Document 2 rNLe 10032016Document8 pagesDocument 2 rNLe 10032016Rajesh SudiNo ratings yet
- Adi Shankara Brochure CompressedDocument8 pagesAdi Shankara Brochure CompressedRajesh SudiNo ratings yet
- Hassan2008 Chapter MeasuringBloodPressureUsingAPhDocument4 pagesHassan2008 Chapter MeasuringBloodPressureUsingAPhRajesh SudiNo ratings yet
- 1 s2.0 S1746809418302209 MainDocument11 pages1 s2.0 S1746809418302209 MainRajesh SudiNo ratings yet
- Biomedical Signal Processing and Control: Iftikhar Ahmad, Faysal Munir, Muhammad Faizan MunirDocument8 pagesBiomedical Signal Processing and Control: Iftikhar Ahmad, Faysal Munir, Muhammad Faizan MunirBrasoveanu GheorghitaNo ratings yet
- Biomedical Signal Processing and Control: V. Mondéjar-Guerra, J. Novo, J. Rouco, M.G. Penedo, M. OrtegaDocument8 pagesBiomedical Signal Processing and Control: V. Mondéjar-Guerra, J. Novo, J. Rouco, M.G. Penedo, M. OrtegamuraliNo ratings yet
- 1 s2.0 S1746809418301289 MainDocument8 pages1 s2.0 S1746809418301289 MainRajesh SudiNo ratings yet
- 1 s2.0 S1746809418302040 MainDocument19 pages1 s2.0 S1746809418302040 MainRajesh SudiNo ratings yet
- Applsci 09 00304Document11 pagesApplsci 09 00304Rajesh SudiNo ratings yet
- Research ArticleDocument14 pagesResearch ArticleRajesh SudiNo ratings yet
- Lecture 2: Overview of Operating SystemDocument42 pagesLecture 2: Overview of Operating SystemRajesh SudiNo ratings yet
- 1 s2.0 S1746809418301927 MainDocument13 pages1 s2.0 S1746809418301927 MainRajesh SudiNo ratings yet
- Chapter 2: Operating-System StructuresDocument44 pagesChapter 2: Operating-System StructuresRajesh SudiNo ratings yet
- Processes and Threads: 2.1 Processes 2.2 Threads 2.3 Interprocess Communication 2.4 Classical IPC Problems 2.5 SchedulingDocument55 pagesProcesses and Threads: 2.1 Processes 2.2 Threads 2.3 Interprocess Communication 2.4 Classical IPC Problems 2.5 SchedulingManasa M RNo ratings yet
- Processes and Threads: 2.1 Processes 2.2 Threads 2.3 Interprocess Communication 2.4 Classical IPC Problems 2.5 SchedulingDocument55 pagesProcesses and Threads: 2.1 Processes 2.2 Threads 2.3 Interprocess Communication 2.4 Classical IPC Problems 2.5 SchedulingManasa M RNo ratings yet
- Vector Calculus - Corral PDFDocument222 pagesVector Calculus - Corral PDFMartin Martin MartinNo ratings yet
- Lecture 2: Overview of Operating SystemDocument42 pagesLecture 2: Overview of Operating SystemRajesh SudiNo ratings yet
- Chapter 1: Introduction Dhamdhere: Operating Systems - A Concept-Based Approach, 2 Ed Slide No: 1Document39 pagesChapter 1: Introduction Dhamdhere: Operating Systems - A Concept-Based Approach, 2 Ed Slide No: 1Rajesh SudiNo ratings yet
- Diagnosis of Skin Cancer Melanoma Using Machine LearningDocument7 pagesDiagnosis of Skin Cancer Melanoma Using Machine LearningRajesh SudiNo ratings yet
- SyllDocument56 pagesSyllRajesh SudiNo ratings yet
- Chap 13Document24 pagesChap 13Rajesh SudiNo ratings yet
- Analysis of EEG Transients by Means of Matching Pursuit: Annals of Biomedical Engineering September 1995Document5 pagesAnalysis of EEG Transients by Means of Matching Pursuit: Annals of Biomedical Engineering September 1995Rajesh SudiNo ratings yet
- Processes and ThreadsDocument48 pagesProcesses and ThreadsRajesh SudiNo ratings yet
- Week2 SlidesDocument15 pagesWeek2 SlideslvrevathiNo ratings yet
- LLM Thesis On Human RightsDocument7 pagesLLM Thesis On Human Rightswssotgvcf100% (2)
- Global Detection - Electronic and Electromechanical Sensors Catalogue 2006.10 PDFDocument800 pagesGlobal Detection - Electronic and Electromechanical Sensors Catalogue 2006.10 PDFSarah RichardNo ratings yet
- Pharmaceutical and Software Development ProjectsDocument6 pagesPharmaceutical and Software Development ProjectsAlexandar123No ratings yet
- Palm Kernel Reinforced Composites for Brake Pad ApplicationsDocument18 pagesPalm Kernel Reinforced Composites for Brake Pad ApplicationsSachin SukumaranNo ratings yet
- The DriversDocument277 pagesThe DriversADENIKE JOHNSONNo ratings yet
- C32 IMO II 950bhp 1600rpm Spec Sheet (LEHM0271-00)Document2 pagesC32 IMO II 950bhp 1600rpm Spec Sheet (LEHM0271-00)Kuswanto MarineNo ratings yet
- Farmakoterapi Penyakit Infeksi: in Infectious Diseases Dewi Rahmawati, M.Farm-Klin.,AptDocument87 pagesFarmakoterapi Penyakit Infeksi: in Infectious Diseases Dewi Rahmawati, M.Farm-Klin.,AptYemima MNo ratings yet
- Budha Dal Aarti Aarta FULLDocument1 pageBudha Dal Aarti Aarta FULLVishal Singh100% (1)
- 65-1-3-D MathematicsDocument8 pages65-1-3-D MathematicsRohan YadavNo ratings yet
- ESL Students' Experiences of Online Peer Feedback: Martin Guardado, Ling ShiDocument19 pagesESL Students' Experiences of Online Peer Feedback: Martin Guardado, Ling ShiJun PrinceNo ratings yet
- Jumping EventsDocument12 pagesJumping EventsPrecious Khyla SantosNo ratings yet
- Kanak Dhara StottramDocument9 pagesKanak Dhara Stottramdd bohraNo ratings yet
- Slogan Goes Here: Local Store Importing CompanyDocument1 pageSlogan Goes Here: Local Store Importing Company5gt6kdfdqhNo ratings yet
- Estudio ArminioDocument13 pagesEstudio ArminioJavier LópezNo ratings yet
- Rogers Lacaze Case InfoDocument1 pageRogers Lacaze Case InfomakeawishNo ratings yet
- Research Methods in AnthropologyDocument28 pagesResearch Methods in AnthropologyMohammad ALNAJJARNo ratings yet
- Leaders Eat Last - Book Summary - VWS - v2.0Document23 pagesLeaders Eat Last - Book Summary - VWS - v2.0REEM HAMDY100% (1)
- Business LetterDocument196 pagesBusiness LetterNulaNo ratings yet
- Oil Well Drilling Methods: University of Karbala College of Engineering Petroleum Eng. DepDocument8 pagesOil Well Drilling Methods: University of Karbala College of Engineering Petroleum Eng. DepAli MahmoudNo ratings yet
- Arnold Jacobs: His Global Influence: Midwest Clinic, Thursday, December 17 12:00-1:00pmDocument17 pagesArnold Jacobs: His Global Influence: Midwest Clinic, Thursday, December 17 12:00-1:00pmAlex MoralesNo ratings yet
- Nanotechnology in TextilesDocument4 pagesNanotechnology in Textileskevin cagud PhillipNo ratings yet
- Case StudiesDocument19 pagesCase StudiesSorin MarkovNo ratings yet
- X1jet MX Manual PDFDocument97 pagesX1jet MX Manual PDFrithik srivastavaNo ratings yet
- Me f215 Mel Lab ManualDocument105 pagesMe f215 Mel Lab ManualpankazspamNo ratings yet
- DBR Gensets DPL120UK Installation, Operation and Maintenance Manual For YN 513510 (MANUAL-I - 2958658 - 1 - A) - 1Document282 pagesDBR Gensets DPL120UK Installation, Operation and Maintenance Manual For YN 513510 (MANUAL-I - 2958658 - 1 - A) - 1RaymondNo ratings yet
- Salon Lesson Plan 233-1Document7 pagesSalon Lesson Plan 233-1api-264569989No ratings yet
- 03 Agriculture GeofileDocument4 pages03 Agriculture GeofilejillysillyNo ratings yet
- IGO Operations Manual PDFDocument2,251 pagesIGO Operations Manual PDFMardi Wirengkoso100% (1)
- Monitoring Rock and Soil Mass Performance: To The ConferenceDocument1 pageMonitoring Rock and Soil Mass Performance: To The ConferenceÉrica GuedesNo ratings yet
- Case Study - Steel Works, Inc.Document5 pagesCase Study - Steel Works, Inc.Tayyab UllahNo ratings yet