You might also like
- Load Encroachment Resistance Settings Calculation Features For Digital Distance Protection K. Brinkis, D. Drozds AS Latvenergo LatviaDocument6 pagesLoad Encroachment Resistance Settings Calculation Features For Digital Distance Protection K. Brinkis, D. Drozds AS Latvenergo LatviasajedarefinNo ratings yet
- S S.A.E: Infrastructure & Cities Sector - Smart Grid DivisionDocument33 pagesS S.A.E: Infrastructure & Cities Sector - Smart Grid DivisionJaved Ahmed LaghariNo ratings yet
- Grounddistancerelays Residualcompensation PDFDocument13 pagesGrounddistancerelays Residualcompensation PDFShahzadmbhattiNo ratings yet
- Power System Protection ECE 456Document50 pagesPower System Protection ECE 456Praveen Paul100% (1)
- Basic Protection TechnologyDocument30 pagesBasic Protection Technologylrpatra100% (1)
- TeleProtection and Week InfeedDocument9 pagesTeleProtection and Week InfeedMr.Biplob100% (1)
- Of Protection Relays: Siemens AG 2006Document34 pagesOf Protection Relays: Siemens AG 2006Walter Andres Estevez VasquezNo ratings yet
- Transformer Protection Fudamentals PDFDocument72 pagesTransformer Protection Fudamentals PDFkbdstl2No ratings yet
- General Line Protection: List of TopicsDocument104 pagesGeneral Line Protection: List of TopicsMeghavahina100% (1)
- Power Plant Protection CoordinationDocument200 pagesPower Plant Protection Coordinationesee57No ratings yet
- ABB-Calculation and Choice of Setting Values For Protection Terminals in Series Compensated System in Venezuela PDFDocument2 pagesABB-Calculation and Choice of Setting Values For Protection Terminals in Series Compensated System in Venezuela PDFAnonymous KTvCCMarbNo ratings yet
- Power System Protection 25Document235 pagesPower System Protection 25mishra.satyam9874100% (1)
- Design of A Pole-Slipping Protection For Loss of Synchronizing of A GeneratorDocument18 pagesDesign of A Pole-Slipping Protection For Loss of Synchronizing of A GeneratorDustin VazquezNo ratings yet
- Earth Fault Protection Principles and Techniques in Solidly Grounded SystemsDocument27 pagesEarth Fault Protection Principles and Techniques in Solidly Grounded SystemsSuresh Chandra PadhyNo ratings yet
- Symmetrical ComponentsDocument147 pagesSymmetrical ComponentsRavikant TarareNo ratings yet
- Testing Alpha Plane Characteristic Paper IPTS 2011 Munro ENUDocument21 pagesTesting Alpha Plane Characteristic Paper IPTS 2011 Munro ENUJose Antonio Huamani ChuquirimayNo ratings yet
- Course PC3, Dubai Applic Ation of Prote Ctive Relayi NG To Distri Bution and Sub-Trans Missi On Syste MsDocument41 pagesCourse PC3, Dubai Applic Ation of Prote Ctive Relayi NG To Distri Bution and Sub-Trans Missi On Syste MsMahmoud Al-QudahNo ratings yet
- Line Protection: Substation Automation ProductsDocument46 pagesLine Protection: Substation Automation ProductsRobert MihayoNo ratings yet
- K-Factor Measurement of CablesDocument4 pagesK-Factor Measurement of CablesAhmed HamzehNo ratings yet
- ElectricalTester VirtualtestingDocument27 pagesElectricalTester VirtualtestingShandukani VhulondoNo ratings yet
- 7SG14 - Duobias M Complete Technical Manual PDFDocument142 pages7SG14 - Duobias M Complete Technical Manual PDFhizbi70% (1)
- CT&PTDocument131 pagesCT&PTDipanjan SenguptaNo ratings yet
- Transformer Differential Protection Relay - Pickup Calculation SheetDocument2 pagesTransformer Differential Protection Relay - Pickup Calculation SheetAlex asherNo ratings yet
- Protection Basics and TerminologyDocument33 pagesProtection Basics and TerminologyMuhammad AbuzarNo ratings yet
- Protection & Coordination by - Dr. Hamid JaffariDocument83 pagesProtection & Coordination by - Dr. Hamid JaffariMuhammad HusnainNo ratings yet
- Fundamentals of Power System Protection - 2012Document75 pagesFundamentals of Power System Protection - 2012rian0201No ratings yet
- Microgrid Lessons Learned: Will Edwards (SEL Engineering Services Division)Document24 pagesMicrogrid Lessons Learned: Will Edwards (SEL Engineering Services Division)Divya NaikNo ratings yet
- Weak Infeed Conditions PDFDocument22 pagesWeak Infeed Conditions PDFMuhammad Fahad SheikhNo ratings yet
- ELEC4617Document4 pagesELEC4617Alison KongNo ratings yet
- 0517 Motor Protection Ge Grid May17Document35 pages0517 Motor Protection Ge Grid May17pothirajNo ratings yet
- Distance Relay Editor Users ManualDocument46 pagesDistance Relay Editor Users ManualMiguel Cb100% (1)
- Resistive Reach Setting of QUAD RelaysDocument14 pagesResistive Reach Setting of QUAD RelaysShahzad Bhatti100% (2)
- Radio and TV Antenna Protection SystemDocument42 pagesRadio and TV Antenna Protection SystemBhanu Prakash100% (1)
- A Novel Approach for Tuning PSS Using GADocument120 pagesA Novel Approach for Tuning PSS Using GADummyofindiaIndiaNo ratings yet
- Transfomer ProtectionDocument56 pagesTransfomer Protectionengkos koswaraNo ratings yet
- Contingency Analysis of Power Systems PDFDocument4 pagesContingency Analysis of Power Systems PDFbenitogaldos19gmail.comNo ratings yet
- Power Worked ExamplesDocument9 pagesPower Worked Examplesbilawal shakirNo ratings yet
- 03-Earth FAult and FAult Resistance - NewDocument21 pages03-Earth FAult and FAult Resistance - Newkjan8899No ratings yet
- 15 - Other Generator Protection - r4Document52 pages15 - Other Generator Protection - r4tajudeenNo ratings yet
- Sub-Synchronous Interaction between Series-Compensated Lines and GenerationDocument3 pagesSub-Synchronous Interaction between Series-Compensated Lines and GenerationjeffguitarNo ratings yet
- NERC Protection System Protection Fundamentals Public 060210Document55 pagesNERC Protection System Protection Fundamentals Public 060210srinivasaphanikiranNo ratings yet
- TeleProtection and Week InfeedDocument9 pagesTeleProtection and Week InfeedMr.BiplobNo ratings yet
- Out of Step Protective Functions and Challenges in Testing Paper IPTS 2015 Proschek ENUDocument6 pagesOut of Step Protective Functions and Challenges in Testing Paper IPTS 2015 Proschek ENUengrdavi Davidean FloresNo ratings yet
- 7UT - Diff Bias SlopeDocument11 pages7UT - Diff Bias SlopeksarawanNo ratings yet
- Protection Functions Guide - FI PDFDocument194 pagesProtection Functions Guide - FI PDFionNo ratings yet
- Hands On Relay School Transformer Protection Open Lecture ClassDocument63 pagesHands On Relay School Transformer Protection Open Lecture ClasshiteshkelaNo ratings yet
- Transformer Data AnalysisDocument4 pagesTransformer Data AnalysisZokiNo ratings yet
- (Elearnica - Ir) - Ground Distance Relay Compensation Based On Fault Resistance CADocument6 pages(Elearnica - Ir) - Ground Distance Relay Compensation Based On Fault Resistance CAAnonymous 9VcxlFErfNo ratings yet
- NERC System Protection and Control Subcommittee SPCS 20 SAMS-SPCS SPS Technic 02182014Document48 pagesNERC System Protection and Control Subcommittee SPCS 20 SAMS-SPCS SPS Technic 02182014sykimk8921No ratings yet
- G1 - Introduction Generator ProtectionDocument21 pagesG1 - Introduction Generator ProtectionOoi Ban JuanNo ratings yet
- Different Types of Line Protection: Reasons For FaultsDocument13 pagesDifferent Types of Line Protection: Reasons For FaultskarlTronxoNo ratings yet
- Gen Protn Philosophy&settingsDocument52 pagesGen Protn Philosophy&settingsRK KNo ratings yet
- Protection and Switchgear - by BakshiDocument397 pagesProtection and Switchgear - by BakshiAhmed Elaraby50% (2)
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsFrom EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsNo ratings yet
- The Technology of Instrument Transformers: Current and Voltage Measurement and Insulation SystemsFrom EverandThe Technology of Instrument Transformers: Current and Voltage Measurement and Insulation SystemsNo ratings yet
- IEEE Recommended Settings For Generator ProtectionDocument7 pagesIEEE Recommended Settings For Generator ProtectionBruno SamosNo ratings yet
- IEEE Recommended Settings For Generator Protection Ver Nov 09Document3 pagesIEEE Recommended Settings For Generator Protection Ver Nov 09Bruno SamosNo ratings yet
- APN-060 Low Impedance Restricted Ground Fault ProtectionDocument15 pagesAPN-060 Low Impedance Restricted Ground Fault ProtectionCarlos Roberto Hernandez FerrerNo ratings yet
- SIPROTEC 5 - Applications OverviewDocument14 pagesSIPROTEC 5 - Applications OverviewCarlos Roberto Hernandez FerrerNo ratings yet
- SIP5-APN 65 Line Differential Protection For 2-Phase ApplicationsDocument6 pagesSIP5-APN 65 Line Differential Protection For 2-Phase ApplicationsCarlos Roberto Hernandez FerrerNo ratings yet
- Teleprotection Scheme With SIPROTEC 5 DevicesDocument12 pagesTeleprotection Scheme With SIPROTEC 5 DevicesCarlos Roberto Hernandez FerrerNo ratings yet
- SIP5 APN 032 - Reliable Transmission of Trip Signal With GOOSE - enDocument10 pagesSIP5 APN 032 - Reliable Transmission of Trip Signal With GOOSE - enCarlos Roberto Hernandez FerrerNo ratings yet
- Sync Check With Voltage Selection and VTs With Different Ratio enDocument8 pagesSync Check With Voltage Selection and VTs With Different Ratio enJose Antonio Huamani ChuquirimayNo ratings yet
- DIGSI 5 Details - Communication IEC 61850 - V1.0 - en - USDocument31 pagesDIGSI 5 Details - Communication IEC 61850 - V1.0 - en - USCarlos Roberto Hernandez FerrerNo ratings yet
- Baja Tension 27 in Generador BDocument3 pagesBaja Tension 27 in Generador BCarlos Roberto Hernandez FerrerNo ratings yet
- pH and ORP Measurement TechniquesDocument38 pagespH and ORP Measurement TechniquesSally GNo ratings yet
- Analysis of Electric Vehicles' Impact To The Electric GridDocument5 pagesAnalysis of Electric Vehicles' Impact To The Electric GridwwzzNo ratings yet
- MDPN471 Omar MohsenDocument11 pagesMDPN471 Omar MohsenOmaroMohsenNo ratings yet
- Doosan Schematic All ModelsDocument20 pagesDoosan Schematic All Modelsstanley100% (53)
- EEE 133 1s2021 Problem Set 2Document3 pagesEEE 133 1s2021 Problem Set 2Roland Paul PrincipeNo ratings yet
- Ups Keor - SPX LegrandDocument2 pagesUps Keor - SPX LegrandapthorNo ratings yet
- Opa 615Document34 pagesOpa 615contrasterNo ratings yet
- 28.M.E. Comunication Sys PDFDocument61 pages28.M.E. Comunication Sys PDFmilaniNo ratings yet
- Kyocera Case AnalysisDocument13 pagesKyocera Case AnalysisMaziar Mottaghian0% (1)
- 4L-PB351G-L60D & 4L-PB531G-L60D SFP BiDi 1000BASE-BXDocument4 pages4L-PB351G-L60D & 4L-PB531G-L60D SFP BiDi 1000BASE-BXGabriel SilveiraNo ratings yet
- CD LabDocument4 pagesCD LabLOUKILkarimNo ratings yet
- 05 Wiring Diagram PDFDocument7 pages05 Wiring Diagram PDFJorge Tom Simpson CruzNo ratings yet
- CORNERSTONE SOI Standard Components Library - Feb 2022Document61 pagesCORNERSTONE SOI Standard Components Library - Feb 2022adityaNo ratings yet
- Nokia 701 Rm-774 Service Schematics v1.0Document13 pagesNokia 701 Rm-774 Service Schematics v1.0sajjadfattahNo ratings yet
- Welcome To "Digital Signal Processing"Document69 pagesWelcome To "Digital Signal Processing"Iqra ImtiazNo ratings yet
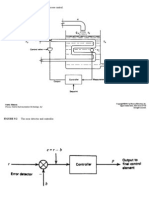
- FIGURE 9.1 Control of Temperature by Process Control.: Curtis JohnsonDocument26 pagesFIGURE 9.1 Control of Temperature by Process Control.: Curtis JohnsonMuhammad Haris HamayunNo ratings yet
- Gases Sensor Board Pro PDFDocument119 pagesGases Sensor Board Pro PDFKellyOliveiraTakitaNo ratings yet
- 15 Ec 661Document6 pages15 Ec 661Prajwal ShettykpNo ratings yet
- Service Manual: DEH-P4350Document67 pagesService Manual: DEH-P4350Lolo SortoNo ratings yet
- Reviewer IndusDocument3 pagesReviewer IndusBajogs RamosNo ratings yet
- SwotDocument2 pagesSwotapi-465380027No ratings yet
- Microstrip Antenna Designs For Radar ApplicationsDocument3 pagesMicrostrip Antenna Designs For Radar ApplicationsRadhika SethuNo ratings yet
- PGS Data SheetDocument9 pagesPGS Data Sheetkiran panditNo ratings yet
- Manual Completo Do Modbus No CLPDocument126 pagesManual Completo Do Modbus No CLPHudson CostaNo ratings yet
- Dokumen - Tips - Aladin Diagnostic Software For The Diwa 5 Transmission Turbo Aladin Diagnostic PDFDocument4 pagesDokumen - Tips - Aladin Diagnostic Software For The Diwa 5 Transmission Turbo Aladin Diagnostic PDFDiego CaceresNo ratings yet
- A Comparison of in Memory DatabasesDocument6 pagesA Comparison of in Memory DatabasesPiyush MandalNo ratings yet
- Optically coupled bilateral switch non-zero crossing triac datasheetDocument3 pagesOptically coupled bilateral switch non-zero crossing triac datasheetElectronicos CaldasNo ratings yet
- Activate! B1 Extra Vocabulary Tests Test 8: Developed by Pearson Longman Hellas 2009Document5 pagesActivate! B1 Extra Vocabulary Tests Test 8: Developed by Pearson Longman Hellas 2009Anonymous wIlqpnk7BwNo ratings yet
- Electrochemistry FR Worksheet Answers Key PDFDocument22 pagesElectrochemistry FR Worksheet Answers Key PDFEmily toaNo ratings yet