You might also like
- Sop For Maintenance DepartmentDocument38 pagesSop For Maintenance DepartmentKanjeng Nasuha Gumat87% (23)
- G55 Build Manual - V2 - 2014 PDFDocument57 pagesG55 Build Manual - V2 - 2014 PDFPericlesleite100% (2)
- Cable & TensileDocument51 pagesCable & TensileChelsea MakilingNo ratings yet
- Four Quadrant Operation of DC Drives: - Dual ConvertersDocument12 pagesFour Quadrant Operation of DC Drives: - Dual ConvertersDr.K.Krishna Veni ProfessorNo ratings yet
- Three-Phase Transformers ExperimentDocument11 pagesThree-Phase Transformers ExperimentAbdulrahman Aldeek0% (1)
- Chapter 5 AC ConverterDocument27 pagesChapter 5 AC ConverterArjun KumarNo ratings yet
- PSIM MANUAL For StudentsDocument23 pagesPSIM MANUAL For StudentsSomnath Khamaru75% (4)
- Problem Set 1Document9 pagesProblem Set 1jerry tranNo ratings yet
- Solid State Controller of Drives - ExperimentDocument37 pagesSolid State Controller of Drives - ExperimentRakesh Singh LodhiNo ratings yet
- Chapter Eight: Dc-Ac Conversion: InvertersDocument57 pagesChapter Eight: Dc-Ac Conversion: InvertersMd NazimNo ratings yet
- A.C Voltage Regulator Using TriacDocument3 pagesA.C Voltage Regulator Using TriacSrinivas VarmaNo ratings yet
- E1 - Controlled Rectifiers PDFDocument92 pagesE1 - Controlled Rectifiers PDFmitulNo ratings yet
- Chapter 3 Two Port Netw All in OneDocument53 pagesChapter 3 Two Port Netw All in OneAbdi Jote100% (1)
- Drives Manual Final EeeDocument60 pagesDrives Manual Final EeenandhakumarmeNo ratings yet
- V and Inverted V Curves of Synchronous MotorDocument7 pagesV and Inverted V Curves of Synchronous Motorkarthikeyan249No ratings yet
- 04 AC Voltage ControllerDocument20 pages04 AC Voltage Controllerkamlesh jatNo ratings yet
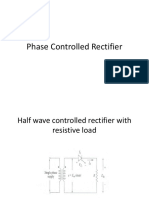
- Phase Controlled RectifierDocument33 pagesPhase Controlled RectifierHarsh HaldiyaNo ratings yet
- DC ChoppersDocument116 pagesDC ChoppersSatyanarayana Gurram50% (2)
- Hopkinson Test On DC Shunt MotorDocument5 pagesHopkinson Test On DC Shunt MotorVarun VadluriNo ratings yet
- All Classroom Class ExamplesDocument51 pagesAll Classroom Class ExamplesAhmed Sabri0% (1)
- Load Test of Single Phase TransformerDocument6 pagesLoad Test of Single Phase TransformerKevin DanyNo ratings yet
- Unit 2 PDFDocument170 pagesUnit 2 PDFSaurabh RajNo ratings yet
- Practical - 3 - Four Quadrant Chopper Fed DC DriveDocument15 pagesPractical - 3 - Four Quadrant Chopper Fed DC Drivekiran navaleNo ratings yet
- EMT 369 Wk2 Power Semiconductor Devices (GC)Document53 pagesEMT 369 Wk2 Power Semiconductor Devices (GC)Ashraf YusofNo ratings yet
- On AC Voltage ControllersDocument25 pagesOn AC Voltage ControllersSahil ChoudharyNo ratings yet
- A McMurray InverterDocument2 pagesA McMurray Inverteranshu71% (7)
- Single Phase InverterDocument29 pagesSingle Phase InverterEla ResearchNo ratings yet
- Power Electronics PDFDocument41 pagesPower Electronics PDFAnand KalNo ratings yet
- Group5 Lab 09Document6 pagesGroup5 Lab 09FALSERNo ratings yet
- InverterDocument53 pagesInverterAgus SetyawanNo ratings yet
- U6 L21 Principle of On Off Control Technique Integral Cycle ControlDocument10 pagesU6 L21 Principle of On Off Control Technique Integral Cycle ControlShiwani LawaniyaNo ratings yet
- Lecture 1-Single-Phase-Controlled-RectifiersDocument41 pagesLecture 1-Single-Phase-Controlled-RectifiersmadihaNo ratings yet
- Experiment No.5-Determination of XD and XQ of Synchronous Machine by Slip TestDocument3 pagesExperiment No.5-Determination of XD and XQ of Synchronous Machine by Slip Test61EEPrabhat PalNo ratings yet
- Power Electronics: Single Phase AC-AC ConvertersDocument18 pagesPower Electronics: Single Phase AC-AC ConvertersMaruti MohiteNo ratings yet
- AC Voltage Controllers: AC To Ac ConvertersDocument25 pagesAC Voltage Controllers: AC To Ac ConvertersPhạm Hữu Kỳ0% (1)
- What Is R.M.S (Root Mean Square) ?Document5 pagesWhat Is R.M.S (Root Mean Square) ?Muhammad UmairNo ratings yet
- Ac QuantitiesDocument7 pagesAc Quantitiessrinivas100% (1)
- Retardation TestDocument5 pagesRetardation TestAnkit Shetty100% (1)
- Solid State Drives Short BookDocument48 pagesSolid State Drives Short BookGomathi Raja MNo ratings yet
- Open-Circuit or No-Load TestDocument13 pagesOpen-Circuit or No-Load TestNANDHAKUMAR ANo ratings yet
- Unit 3: Ideal Voltage and Current SourcesDocument1 pageUnit 3: Ideal Voltage and Current SourcesSangita PanigrahiNo ratings yet
- TEE3211 DrivesDocument126 pagesTEE3211 DrivesWebster Fungirai100% (1)
- Dcmotors and Their RepresentationDocument61 pagesDcmotors and Their RepresentationSoeprapto AtmariNo ratings yet
- EE-260 Lecture 07, 08, 09 TransformerDocument49 pagesEE-260 Lecture 07, 08, 09 TransformerNihal AhmadNo ratings yet
- 1.voltage Distribution Across String of InsulatorsDocument3 pages1.voltage Distribution Across String of Insulatorsarjuna4306No ratings yet
- AC CircuitsDocument20 pagesAC CircuitsNikhil GobhilNo ratings yet
- Eee 304 Lecture Notes - 1Document171 pagesEee 304 Lecture Notes - 1Haritha RkNo ratings yet
- RTU EE Control System Lab 5th SemDocument2 pagesRTU EE Control System Lab 5th SemBhuvneshRathore100% (1)
- Dynamic Characteristics of ThyristorDocument4 pagesDynamic Characteristics of ThyristordamiesiksNo ratings yet
- Ac Voltage Controller Using Thyristor Project Report by SandeepDocument29 pagesAc Voltage Controller Using Thyristor Project Report by SandeepSANDEEP DHANDA100% (1)
- 180 Degree ConductionDocument27 pages180 Degree Conductionsathishsutharsan87No ratings yet
- Lab#3A: Full-Wave Bridge Rectifier Circuit Without and With FilterDocument6 pagesLab#3A: Full-Wave Bridge Rectifier Circuit Without and With FilterSadil BatafNo ratings yet
- EXP2 Half Wave RectifierDocument3 pagesEXP2 Half Wave RectifierMohammed Dyhia Ali50% (2)
- AC DC DrivesDocument13 pagesAC DC Drives322399mk7086No ratings yet
- Block Diagram of Chopper Fed-Dc MotorDocument1 pageBlock Diagram of Chopper Fed-Dc MotorMohammed Saad100% (1)
- Punith 2Document50 pagesPunith 2Punith Kumar YanagandulaNo ratings yet
- Ac Voltage Controller Circuits (Rms Voltage Controllers) : V Variable AC RMS O/P Voltage AC Input Voltage F V FDocument22 pagesAc Voltage Controller Circuits (Rms Voltage Controllers) : V Variable AC RMS O/P Voltage AC Input Voltage F V FDasari SrinivasNo ratings yet
- 02 Power ElectronicsDocument211 pages02 Power Electronicsకృష్ణ మురళి100% (2)
- AC Voltage Controller CircuitsDocument211 pagesAC Voltage Controller CircuitsTran Binh DuongNo ratings yet
- Ac Voltage Controller PDFDocument36 pagesAc Voltage Controller PDFsolo4000100% (3)
- Edusat Programme Lecture Notes ON Power Electronics BY Prof. M. Madhusudhan RaoDocument213 pagesEdusat Programme Lecture Notes ON Power Electronics BY Prof. M. Madhusudhan RaoSana BanuNo ratings yet
- 02 Power ElectronicsDocument212 pages02 Power Electronicsmarkschurer223453No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- 2020 Identification of Unbalance in A Rotor-Bearing System Using Kalman Filter-Based Input Estimation TechniqueDocument11 pages2020 Identification of Unbalance in A Rotor-Bearing System Using Kalman Filter-Based Input Estimation TechniqueakashNo ratings yet
- Extension Cord ProjectDocument3 pagesExtension Cord ProjectRoniel Balverde100% (3)
- Optimize WordPress SpeedDocument21 pagesOptimize WordPress SpeedJovan Veličković100% (2)
- 11-2.3.12 Control of Working at HeightsDocument9 pages11-2.3.12 Control of Working at HeightsFrancisco M. Ramos100% (1)
- Bs en 13445 3 2009Document17 pagesBs en 13445 3 2009pkmNo ratings yet
- Manual Crystal Gauge Cal XPDocument8 pagesManual Crystal Gauge Cal XPRadinal MuchtarNo ratings yet
- EM24.59.500 Marking PunchDocument17 pagesEM24.59.500 Marking PunchVitalii TeteraNo ratings yet
- IWP Lab ManualDocument28 pagesIWP Lab ManualChester LaneNo ratings yet
- ATEX SummaryDocument8 pagesATEX Summarycgjp120391No ratings yet
- Bel 06 Field Effect TransistorDocument17 pagesBel 06 Field Effect TransistorBharavi K SNo ratings yet
- BP-TGH-PF-TR-A-0066 (021-PV-1202B BY CRANE 200te)Document15 pagesBP-TGH-PF-TR-A-0066 (021-PV-1202B BY CRANE 200te)Abdul Majid ZNo ratings yet
- 156, Avenue de Metz - 93230 Romainville - France Tél. (33-1) 48.43.93.61 - Télex 235566FDocument71 pages156, Avenue de Metz - 93230 Romainville - France Tél. (33-1) 48.43.93.61 - Télex 235566FАлександр ИвашкевичNo ratings yet
- Spax (Safi Pickup Amplifier Extended) : Technical InstructionDocument26 pagesSpax (Safi Pickup Amplifier Extended) : Technical InstructionAli QaziNo ratings yet
- Paquete 15tr York Zz15 - Tech GuideDocument41 pagesPaquete 15tr York Zz15 - Tech GuideWilson Javier CabraNo ratings yet
- Aerodrome Chart - Icao: Bearing StrengthDocument1 pageAerodrome Chart - Icao: Bearing StrengthIqsaNo ratings yet
- Electrical Measurements LabDocument40 pagesElectrical Measurements Labmdayyub100% (4)
- Request For Proposals (RFP) For ID/IQ Mechanical Plumbing Engineering ServicesDocument15 pagesRequest For Proposals (RFP) For ID/IQ Mechanical Plumbing Engineering ServicesHotnCrispy CrispyNo ratings yet
- ME424 201516 Unit 1-1Document41 pagesME424 201516 Unit 1-1saiNo ratings yet
- CM&E Full Notes With ProblemsDocument172 pagesCM&E Full Notes With ProblemsManasvi LokeshNo ratings yet
- Industrial Training Report PDFDocument63 pagesIndustrial Training Report PDFVandana SinghNo ratings yet
- Postdoc Position in KAUSTDocument1 pagePostdoc Position in KAUSTmarwen_zNo ratings yet
- Design Manual For Low Volume RoadsDocument86 pagesDesign Manual For Low Volume RoadsArosh Khan100% (2)
- P 1Document7 pagesP 1Chandra Sekar67% (6)
- ASTM D6528-17 Standard Test Method For Consolidated Undrained Direct Simple Shear Testing of Fine Grain SoilsDocument6 pagesASTM D6528-17 Standard Test Method For Consolidated Undrained Direct Simple Shear Testing of Fine Grain Soilsbenedick barquinNo ratings yet
- Refractory Ceramic Fiber BlanketDocument2 pagesRefractory Ceramic Fiber BlankethailmarylugoNo ratings yet
- 2S BS4 CDocument57 pages2S BS4 CNittu Singh ChauhanNo ratings yet
- Table 1 - 1: The Following Table Indicates Where To Find The Appropriate Schematic DiagramDocument32 pagesTable 1 - 1: The Following Table Indicates Where To Find The Appropriate Schematic DiagramAshok JangraNo ratings yet