You might also like
- Direction Indicator Construction and Operating PrincipleDocument7 pagesDirection Indicator Construction and Operating PrincipleHimanshu HaldarNo ratings yet
- Gyro and Magnetic CompassDocument18 pagesGyro and Magnetic CompassRJ Leonardo100% (2)
- Tidal Force Calculator - High Accuracy CalculationDocument3 pagesTidal Force Calculator - High Accuracy CalculationNeptuneBeatzHD0% (1)
- Gyro NotesDocument12 pagesGyro NotesManupriya Singh100% (2)
- Surveying Volume 2 by B.C.Punmia, Ashok Kumar Jain and Arun Kumar Jain PDFDocument336 pagesSurveying Volume 2 by B.C.Punmia, Ashok Kumar Jain and Arun Kumar Jain PDFAnban Guna100% (1)
- Theodolite Traversing Techniques and ComputationsDocument32 pagesTheodolite Traversing Techniques and Computationsymanfasimf50% (2)
- Theodolite (Survey)Document50 pagesTheodolite (Survey)Suraj KeshkarNo ratings yet
- Gyro CompassDocument36 pagesGyro CompassAfiq Abidin100% (1)
- Longwall Mining PDFDocument114 pagesLongwall Mining PDFGudu PandaNo ratings yet
- THEODOLITEDocument12 pagesTHEODOLITEraghavendar12100% (1)
- Mining SurveyingDocument260 pagesMining SurveyingMarcel Mhuru100% (1)
- Analisis Karakteristik Panasbumi Daerah Outflow PDFDocument7 pagesAnalisis Karakteristik Panasbumi Daerah Outflow PDFEM Rifqi Wilda PradanaNo ratings yet
- Gyro Attachment Simplifies SurveyingDocument4 pagesGyro Attachment Simplifies SurveyingPrasun100% (1)
- Mine Surveying Gyro Theodolite PDFDocument4 pagesMine Surveying Gyro Theodolite PDFMuhammad Aalam KhanNo ratings yet
- Advanced Photogeology - 2Document28 pagesAdvanced Photogeology - 2Edgar Roque Gutierrez SalinasNo ratings yet
- Sarscape Help PDFDocument890 pagesSarscape Help PDFBenjamin LansNo ratings yet
- A Manual of Underground Survei NG ADocument304 pagesA Manual of Underground Survei NG Adanielionut86No ratings yet
- Chapter 5 The Matrix Method in Paraxial Optics: Optical SystemsDocument22 pagesChapter 5 The Matrix Method in Paraxial Optics: Optical SystemsElizabeth zachariasNo ratings yet
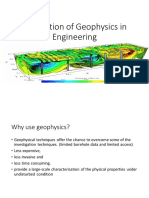
- 7.1 Application of Geophysics in EngineeringDocument19 pages7.1 Application of Geophysics in EngineeringDenver John TejadaNo ratings yet
- Gyroscope Lab ExperimentDocument5 pagesGyroscope Lab Experimentrhusseinpos4765No ratings yet
- Navigation SystemsDocument12 pagesNavigation SystemsPARTHIBANNo ratings yet
- Forces QuadcopterDocument12 pagesForces QuadcopterChetan PawarNo ratings yet
- The GyroscopeDocument5 pagesThe GyroscopeJimoh OlalekanNo ratings yet
- Angular Measurement 2014Document18 pagesAngular Measurement 2014Fazelah Yakub100% (2)
- GROUP DELTA GYRO COMPASS PRINCIPLESDocument17 pagesGROUP DELTA GYRO COMPASS PRINCIPLESChristian Felix Guevarra100% (2)
- M11.5A 2 Gyroscopic Instrument OkDocument73 pagesM11.5A 2 Gyroscopic Instrument OkellysazainudinNo ratings yet
- L02 5 Inertial - Nav SysDocument36 pagesL02 5 Inertial - Nav Sysm gopakumarNo ratings yet
- Gyroscope: For Other Uses and Non-Rotary Gyroscopes, SeeDocument3 pagesGyroscope: For Other Uses and Non-Rotary Gyroscopes, SeeFaiezKhanNo ratings yet
- Understanding Gyroscopes and Their ApplicationsDocument41 pagesUnderstanding Gyroscopes and Their ApplicationsMalhar NityanandNo ratings yet
- Compass Gyroscope PDFDocument35 pagesCompass Gyroscope PDFjennybunnyomgNo ratings yet
- 02 Principles of Gyroscopic InstrumentsDocument18 pages02 Principles of Gyroscopic InstrumentsFurkan DuruNo ratings yet
- Ir Yus Kadarusman Markis Dipl Ing 30062019180131 Handout 1 BDocument51 pagesIr Yus Kadarusman Markis Dipl Ing 30062019180131 Handout 1 Bchintya rahmahtillah edwinNo ratings yet
- SextantsDocument27 pagesSextantscjnjr1No ratings yet
- Azimuth PointDocument13 pagesAzimuth PointChriss JobinNo ratings yet
- DescriptionDocument7 pagesDescriptionfarookkarimNo ratings yet
- SynopsisDocument12 pagesSynopsisGopal AggarwalNo ratings yet
- Tokimec TG-100Document76 pagesTokimec TG-100Duy Nguyentruc100% (1)
- GyroscopesDocument15 pagesGyroscopesgeenjunkmailNo ratings yet
- ATPL Inst 2.4 PDFDocument10 pagesATPL Inst 2.4 PDFKoustubh VadalkarNo ratings yet
- GyroscopesDocument34 pagesGyroscopesNikhil SinghNo ratings yet
- MECA 324 Sensors & Actuators: Velocity and Acceleration SensorsDocument16 pagesMECA 324 Sensors & Actuators: Velocity and Acceleration SensorsArda GunayNo ratings yet
- TheodolitesDocument18 pagesTheodolitesChampionip4p100% (2)
- ATPL Inst 3.1 PDFDocument10 pagesATPL Inst 3.1 PDFKoustubh VadalkarNo ratings yet
- Notes 12Document27 pagesNotes 12Ruben ChirinosNo ratings yet
- Universal Joint Transmits Rotary Motion Between Non-Parallel ShaftsDocument15 pagesUniversal Joint Transmits Rotary Motion Between Non-Parallel Shaftsmos3ad2006100% (1)
- Orientation Measurement With GyrotheodoliteDocument6 pagesOrientation Measurement With GyrotheodoliteAlan KhaleelNo ratings yet
- 1 EX-5519-Variable-g-PendulumDocument7 pages1 EX-5519-Variable-g-PendulumSohaib IrfanNo ratings yet
- Gyro PDFDocument165 pagesGyro PDFvineesh chandraNo ratings yet
- Gyroscopic InstrumentsDocument23 pagesGyroscopic InstrumentsRobin ForbesNo ratings yet
- Variable - GDocument4 pagesVariable - Gxogus6216No ratings yet
- Measure Torsion Constant of a RodDocument3 pagesMeasure Torsion Constant of a RodARSLANNo ratings yet
- Exp 6 GyroscopeDocument25 pagesExp 6 GyroscopeBikash ChoudhuriNo ratings yet
- GyroscopeDocument7 pagesGyroscopeRajesh SarkarNo ratings yet
- ReportDocument13 pagesReportMamta SindhuNo ratings yet
- Experiment # 10Document4 pagesExperiment # 10Usama0% (1)
- 3,4,5 Unit - 080450Document73 pages3,4,5 Unit - 080450CE 19 Kaushlendra KumarNo ratings yet
- MMD Navaids Theory SolvedDocument96 pagesMMD Navaids Theory SolvedNishant ranaNo ratings yet
- 03 Common Gyroscopic InstrumentsDocument26 pages03 Common Gyroscopic InstrumentsFurkan DuruNo ratings yet
- Lab 11 ManualDocument6 pagesLab 11 Manualmubarik aliNo ratings yet
- Lab Manual ME 2409Document135 pagesLab Manual ME 2409Mohit lilhoreNo ratings yet
- 1.theodolite - Introduction, Parts, Terms, ClassificationDocument27 pages1.theodolite - Introduction, Parts, Terms, ClassificationSarthak KhamkarNo ratings yet
- G-5500 Im Eng E12901004Document12 pagesG-5500 Im Eng E12901004ampetreNo ratings yet
- Group 6 GyroscopeDocument17 pagesGroup 6 GyroscopePhenias ManyashaNo ratings yet
- New Doc 2019-10-27 19.31.34Document16 pagesNew Doc 2019-10-27 19.31.34Gudu PandaNo ratings yet
- 7strength Properties of Rocks and Rock MassesDocument16 pages7strength Properties of Rocks and Rock MassesSheshu BabuNo ratings yet
- New Doc 2019-09-26 09.06.38Document2 pagesNew Doc 2019-09-26 09.06.38Gudu PandaNo ratings yet
- New Doc 2019-10-24 10.06.01 PDFDocument3 pagesNew Doc 2019-10-24 10.06.01 PDFGudu PandaNo ratings yet
- New Doc 2019-09-23 08.16.00Document3 pagesNew Doc 2019-09-23 08.16.00Gudu PandaNo ratings yet
- Mi STC 1617 GigsDocument3 pagesMi STC 1617 GigsGudu PandaNo ratings yet
- CostunderagedrinkingDocument28 pagesCostunderagedrinkingGudu PandaNo ratings yet
- Characterization and Utilization of Fly AshDocument45 pagesCharacterization and Utilization of Fly AshGudu Panda100% (1)
- SFD&BMDDocument13 pagesSFD&BMDGudu PandaNo ratings yet
- Alcohol and Crime in EuropeDocument442 pagesAlcohol and Crime in EuropeJames RodgersNo ratings yet
- Azimuth Determination by GyroscopeDocument8 pagesAzimuth Determination by Gyroscopejlhunter70No ratings yet
- Connecting Surveys and Orientation Measurements in Čsa 2 and Mír 5 ShaftsDocument8 pagesConnecting Surveys and Orientation Measurements in Čsa 2 and Mír 5 ShaftsJoh0% (1)
- Arc Blow Causes and TypesDocument4 pagesArc Blow Causes and TypeschuckpinoNo ratings yet
- Surveying - II PracticeI Lab Manual-NEWDocument43 pagesSurveying - II PracticeI Lab Manual-NEWPathipati Narasimharao100% (1)
- Advanced Survey MethodsDocument83 pagesAdvanced Survey MethodsMarcel MhuruNo ratings yet
- 1974 - Gervaise - High Precision Survey and Alignment Techniques in Accelerator ConstructionDocument37 pages1974 - Gervaise - High Precision Survey and Alignment Techniques in Accelerator ConstructionVikasNo ratings yet
- Mine Surveying CompileDocument31 pagesMine Surveying Compilenuno pereira0% (1)
- Mine Correlation SurveyDocument53 pagesMine Correlation SurveyENOS MOYONo ratings yet
- Applications of Aerial Photogrammetry in Archaeology, Urban Studies, Climate Change and Earth SciencesDocument13 pagesApplications of Aerial Photogrammetry in Archaeology, Urban Studies, Climate Change and Earth SciencesZain AbidNo ratings yet
- GyrotheodoliteDocument10 pagesGyrotheodoliteGudu PandaNo ratings yet
- Find The Right LocationDocument16 pagesFind The Right Locationjohn rodney picaNo ratings yet
- Hydrographic and Tunnel SurveyingDocument21 pagesHydrographic and Tunnel Surveyingzain Ishaq100% (1)