You might also like
- เครื่องกำเนิดไฟฟ้า คืออะไรDocument14 pagesเครื่องกำเนิดไฟฟ้า คืออะไรchock channel 19No ratings yet
- EE11 การควบคุมและสั่งการระบบจ่ายไฟฟ้าDocument16 pagesEE11 การควบคุมและสั่งการระบบจ่ายไฟฟ้าbmw316No ratings yet
- short circuit transformer บทที่ 2 -by nawaphon kaeoketsriDocument21 pagesshort circuit transformer บทที่ 2 -by nawaphon kaeoketsriนวพล แก้วเกษศรีNo ratings yet
- 008-บทที่ 8 วงจรย่อยและสายป้อนมอเตอร์Document149 pages008-บทที่ 8 วงจรย่อยและสายป้อนมอเตอร์ใบบอนสิชล100% (1)
- 6B514826-542B-4836-900A-B1B02EA493D9(1)Document34 pages6B514826-542B-4836-900A-B1B02EA493D9(1)Dusita Vongwai100% (1)
- 03 Fault CalculationDocument45 pages03 Fault CalculationEkarat TopolNo ratings yet
- 09 Transformer ProtectionDocument90 pages09 Transformer ProtectionEkarat TopolNo ratings yet
- 11 Busbar ProtectionDocument78 pages11 Busbar ProtectionEkarat TopolNo ratings yet
- IEC มาตรฐานคุณภาพไฟฟ้าของประเทศไทยและทิศทางในอนาคตDocument7 pagesIEC มาตรฐานคุณภาพไฟฟ้าของประเทศไทยและทิศทางในอนาคตchock channel 19No ratings yet
- หน่วยที่ 10การทดสอบหม้อแปลงDocument10 pagesหน่วยที่ 10การทดสอบหม้อแปลงพชรคุณ กระทุ่มทองNo ratings yet
- 13 Pilot ProtectionDocument79 pages13 Pilot ProtectionEkarat TopolNo ratings yet
- ทำไมต้อง5โอมDocument4 pagesทำไมต้อง5โอมWisawachit LimpaiboonNo ratings yet
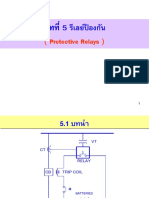
- 05 Protective RelayDocument84 pages05 Protective RelayEkarat TopolNo ratings yet
- หน่วยที่ 9วงจรสมมูลของหม้อแปลงDocument14 pagesหน่วยที่ 9วงจรสมมูลของหม้อแปลงອູ່ ໄຊ ອິນເຕີNo ratings yet
- 12 Transmission ProtectionDocument159 pages12 Transmission ProtectionEkarat TopolNo ratings yet
- INSTRUCTION-MANUAL สำหรับหลังคาเมทัลชีทและCPACDocument18 pagesINSTRUCTION-MANUAL สำหรับหลังคาเมทัลชีทและCPACsombatse100% (1)
- คู่มือเครื่องป้องกันไฟกระโชกทางสายจ่ายกำลังไฟฟ้า PDFDocument21 pagesคู่มือเครื่องป้องกันไฟกระโชกทางสายจ่ายกำลังไฟฟ้า PDFพรุ่งนี้ ก็เช้าแล้วNo ratings yet
- ปรับปรุง PfDocument57 pagesปรับปรุง PfWisawachit LimpaiboonNo ratings yet
- การขนานหม้อแปลงที่ไม่เหมือนกันเข้าด้วยกันDocument3 pagesการขนานหม้อแปลงที่ไม่เหมือนกันเข้าด้วยกันbigdick2547100% (2)
- FRS Standard 07 2554Document14 pagesFRS Standard 07 2554Ae SuwaphanNo ratings yet
- 4 - Over Current ProtectionDocument54 pages4 - Over Current ProtectionARNATCHAI SAWATDIRAKNo ratings yet
- TransformerAndMaintenance PDFDocument40 pagesTransformerAndMaintenance PDFMr Bouathong NIKTHIXAYNo ratings yet
- 06 - Insulation Coordination in HV System-1Document37 pages06 - Insulation Coordination in HV System-1chockanan suwanprasertNo ratings yet
- สรุปพื้นฐานTransformer Differential RelayDocument7 pagesสรุปพื้นฐานTransformer Differential RelayRanchida Phuangphis100% (2)
- 01 PhilosophiesDocument81 pages01 PhilosophiesEkarat TopolNo ratings yet
- Tis 2202 2547 PDFDocument40 pagesTis 2202 2547 PDFMagicneering PredictNo ratings yet
- PQ02SeriseBook PDFDocument171 pagesPQ02SeriseBook PDFnikhom_dk1565No ratings yet
- surge ต่อเสาไฟฟ้าDocument157 pagessurge ต่อเสาไฟฟ้าหมัง ตู้No ratings yet
- การปรับปรุงตัวประกอบกําลัง Power Factor CorrectionDocument116 pagesการปรับปรุงตัวประกอบกําลัง Power Factor CorrectionEkanit ChuaykoedNo ratings yet
- การขนานเครื่องกำเนิดไฟฟ้ากระแสสลับDocument8 pagesการขนานเครื่องกำเนิดไฟฟ้ากระแสสลับฐิตินันท์ เม่นขํา100% (1)
- AVR BasicDocument42 pagesAVR BasicPithoon Ungnaparat100% (4)
- ร่างมาตรออกแบบและติดตั้งครื่องกำเนิดไฟฟ้า 280515 เทคนิคพิจารณ์Document136 pagesร่างมาตรออกแบบและติดตั้งครื่องกำเนิดไฟฟ้า 280515 เทคนิคพิจารณ์สาธิต ปริ นทร์ทองNo ratings yet
- การขนานเครื่องกําเนิดไฟฟ้ากระแสสลับ PDFDocument6 pagesการขนานเครื่องกําเนิดไฟฟ้ากระแสสลับ PDFพรุ่งนี้ ก็เช้าแล้ว60% (5)
- งานวิจัยที่ 1. การวิเคราะห์ค่าความเครียดสนามไฟฟ้าแรงสูงในขดลวด Lp และ Ls ของหม้อแลงเทสล่าDocument4 pagesงานวิจัยที่ 1. การวิเคราะห์ค่าความเครียดสนามไฟฟ้าแรงสูงในขดลวด Lp และ Ls ของหม้อแลงเทสล่าloso_loso100% (1)
- บทที่6 การออกแบบระบบไฟฟ้าDocument28 pagesบทที่6 การออกแบบระบบไฟฟ้าsorawit yuenyong100% (1)
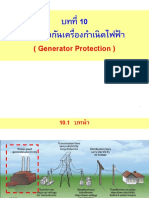
- 10-Generator ProtectionDocument88 pages10-Generator ProtectionRanchida PhuangphisNo ratings yet
- PEA 2016 Connection CodeDocument98 pagesPEA 2016 Connection CodeKittisakNo ratings yet
- บทที่ 3 เครื่องกำเนิดไฟฟ้ากระแสตรงDocument18 pagesบทที่ 3 เครื่องกำเนิดไฟฟ้ากระแสตรงPutter DatkunNo ratings yet
- Electric Motors 261259Document46 pagesElectric Motors 261259NattapongJomjunNo ratings yet
- สรุปพื้นฐานTransformer Differential RelayDocument3 pagesสรุปพื้นฐานTransformer Differential RelayRanchida PhuangphisNo ratings yet
- 005-บทที่ 5 บริภัณฑ์ไฟฟ้าDocument134 pages005-บทที่ 5 บริภัณฑ์ไฟฟ้าWisawachit Limpaiboon75% (4)
- 2. ปัญหาฮาร์มอนิก - Power Quality TeamDocument3 pages2. ปัญหาฮาร์มอนิก - Power Quality Teamchock channel 19No ratings yet
- 002-บทที่ 2 ระบบการส่งจ่ายกำลังไฟฟ้าDocument46 pages002-บทที่ 2 ระบบการส่งจ่ายกำลังไฟฟ้าWisawachit LimpaiboonNo ratings yet
- 003-บทที่ 3 สายไฟฟ้าDocument156 pages003-บทที่ 3 สายไฟฟ้าใบบอนสิชลNo ratings yet
- ข้อกำหนด Main Switch BoardDocument122 pagesข้อกำหนด Main Switch BoardWasin CoolNo ratings yet
- 58 Short Circuit CalculationDocument10 pages58 Short Circuit CalculationFrance PassawishNo ratings yet
- บทที่15- การป้องกัน และการทำ Coordination ระหว่าง Utility กDocument3 pagesบทที่15- การป้องกัน และการทำ Coordination ระหว่าง Utility กAhmed SabriNo ratings yet
- 24 KV Switchgear GISDocument16 pages24 KV Switchgear GISMagicneering PredictNo ratings yet
- 1 ข้อกำหนดการเชื่อมต่อสถานีไฟฟ้าเอกชนระดับแรงดัน 115 เควี กับการไฟฟ้านครหลวงDocument24 pages1 ข้อกำหนดการเชื่อมต่อสถานีไฟฟ้าเอกชนระดับแรงดัน 115 เควี กับการไฟฟ้านครหลวงkrit_kasem100% (2)
- ข้อสอบ ออกแบบระบบไฟฟ้าเบื้องต้นDocument10 pagesข้อสอบ ออกแบบระบบไฟฟ้าเบื้องต้นPhadoongsak PH100% (1)
- โครงสร้างระบบไฟฟ้ากำลังDocument58 pagesโครงสร้างระบบไฟฟ้ากำลังArt Indy100% (3)
- บทที่14- การใช้ Auto-Recloser-01Document8 pagesบทที่14- การใช้ Auto-Recloser-01Ahmed SabriNo ratings yet
- การเกิดก๊าซระบายอากาศ BatteryDocument3 pagesการเกิดก๊าซระบายอากาศ BatteryvesselNo ratings yet
- ความรู้เกียวกับสถานีไฟฟ้าแรงสูง - ความรู้เกียวกับสถานีไฟฟ้าแรงสูง High Voltage SubstationDocument16 pagesความรู้เกียวกับสถานีไฟฟ้าแรงสูง - ความรู้เกียวกับสถานีไฟฟ้าแรงสูง High Voltage Substationณัฐสักก์ ภัทรถาวรนันท์100% (1)
- ร่าง TOR EGAT Smart grid บางประกงDocument147 pagesร่าง TOR EGAT Smart grid บางประกงPsat ThailandNo ratings yet
- บทที่08- การป้องกันมอเตอร์-01Document12 pagesบทที่08- การป้องกันมอเตอร์-01Ahmed Sabri100% (2)
- มอเตอร์ไฟฟ้ากระแสสลับ 3 เฟสDocument33 pagesมอเตอร์ไฟฟ้ากระแสสลับ 3 เฟสThananuwat Suksaro100% (4)
- บทที่10- การป้องกันเครื่องกำเหนิดไฟฟ้า-01Document24 pagesบทที่10- การป้องกันเครื่องกำเหนิดไฟฟ้า-01Ahmed Sabri100% (2)
- ความรู้พื้นฐานเครื่องกำเนิดไฟฟ้าDocument13 pagesความรู้พื้นฐานเครื่องกำเนิดไฟฟ้าWarawutBoondethNo ratings yet
- TNP Unit 8 PDFDocument48 pagesTNP Unit 8 PDFเคที อิเลกNo ratings yet
- 12 Transmission ProtectionDocument159 pages12 Transmission ProtectionEkarat TopolNo ratings yet
- 13 Pilot ProtectionDocument79 pages13 Pilot ProtectionEkarat TopolNo ratings yet
- 11 Busbar ProtectionDocument78 pages11 Busbar ProtectionEkarat TopolNo ratings yet
- 05 Protective RelayDocument84 pages05 Protective RelayEkarat TopolNo ratings yet
- 09 Transformer ProtectionDocument90 pages09 Transformer ProtectionEkarat TopolNo ratings yet
- 03 Fault CalculationDocument45 pages03 Fault CalculationEkarat TopolNo ratings yet
- 01 PhilosophiesDocument81 pages01 PhilosophiesEkarat TopolNo ratings yet