You might also like
- Điều Khiển-dong-co-buocDocument30 pagesĐiều Khiển-dong-co-buocSự NguyễnNo ratings yet
- Bài tập lớn Cơ điện tửDocument32 pagesBài tập lớn Cơ điện tửTrọng Nam NguyễnNo ratings yet
- Thiet Ke Mach Dem San PhamDocument26 pagesThiet Ke Mach Dem San PhamPham Quang VinhNo ratings yet
- Đề Tài: Thiết kế hệ thống giám sát khí ga và đưa ra cảnh báoDocument12 pagesĐề Tài: Thiết kế hệ thống giám sát khí ga và đưa ra cảnh báoTuấn HoàngNo ratings yet
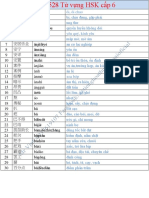
- Tu Vung HSK 6 PDFDocument80 pagesTu Vung HSK 6 PDFThao Chi Tran Ngoc100% (1)
- Đồ Án Thiết Kế Mạch Giao ThôngDocument24 pagesĐồ Án Thiết Kế Mạch Giao ThôngGame MobileNo ratings yet
- HỌC VIỆN KỸ THUẬT MẬT MÃ ĐỒ ÁN THIẾT KẾ MẠCHDocument34 pagesHỌC VIỆN KỸ THUẬT MẬT MÃ ĐỒ ÁN THIẾT KẾ MẠCHCông TùngNo ratings yet
- Giam Sat Dong Co DCDocument21 pagesGiam Sat Dong Co DCKhoa LêNo ratings yet
- TTTTDocument25 pagesTTTTVõ Ngọc ThiệnNo ratings yet
- Báo cáo bài tập lớn vi xử lí trong đo lường và điều khiểnDocument11 pagesBáo cáo bài tập lớn vi xử lí trong đo lường và điều khiểnMinh NiemNo ratings yet
- Báo Cáo Đ Án 1Document17 pagesBáo Cáo Đ Án 1Hưng Trương Văn ViệtNo ratings yet
- Giáo Trình Thực Hành Vi Điều Khiển (NXB Sư Phạm Kỹ Thuật 2014) - Đặng Thành Tựu - 178 TrangDocument178 pagesGiáo Trình Thực Hành Vi Điều Khiển (NXB Sư Phạm Kỹ Thuật 2014) - Đặng Thành Tựu - 178 TrangMan EbookNo ratings yet
- NG D NG MTDocument15 pagesNG D NG MTminh quan leNo ratings yet
- Báo Cáo Đ ánVDK VXLDocument25 pagesBáo Cáo Đ ánVDK VXLDuy Khánh NguyễnNo ratings yet
- LamQuangHuy HTN T6Document17 pagesLamQuangHuy HTN T6Hiên ĐặngNo ratings yet
- 00 Do An Lap Trinh C Cho VI Dieu Khien 3585Document66 pages00 Do An Lap Trinh C Cho VI Dieu Khien 3585thanhtu170No ratings yet
- VXL Nhóm 13Document21 pagesVXL Nhóm 13Quảng Lê XuânNo ratings yet
- mở đầuDocument25 pagesmở đầuMinh QuânNo ratings yet
- Nhóm 22 - SPIN - COATING - KTMM PDFDocument14 pagesNhóm 22 - SPIN - COATING - KTMM PDFĐặng Quốc Thiên ThànhNo ratings yet
- Bao Cao DoanDocument54 pagesBao Cao DoanAnh DuyNo ratings yet
- Luận Văn - Thiết Kế Xây Dựng Bộ Đếm Xung, Ứng Dụng Đo Tốc Độ Động Cơ Trong Hệ Thống Truyền Động Điện - 807747Document63 pagesLuận Văn - Thiết Kế Xây Dựng Bộ Đếm Xung, Ứng Dụng Đo Tốc Độ Động Cơ Trong Hệ Thống Truyền Động Điện - 807747Nguyễn Hoàng DuyNo ratings yet
- BT Tuần 11Document15 pagesBT Tuần 11laggame2003No ratings yet
- Tailieuxanh Bao Cao Chi Tiet VDK 1 6856Document20 pagesTailieuxanh Bao Cao Chi Tiet VDK 1 6856Quang MạnhNo ratings yet
- Obstacle Avoiding RobotDocument16 pagesObstacle Avoiding Robotducb1913016No ratings yet
- Báo Cáo Cuối Kỳ Vi Điều KhiểnfDocument38 pagesBáo Cáo Cuối Kỳ Vi Điều KhiểnfPhạm Xuân TrungNo ratings yet
- Báo Cáo TKMSDMTDocument39 pagesBáo Cáo TKMSDMTCông TùngNo ratings yet
- BÁO CÁO MÔN HỌCDocument50 pagesBÁO CÁO MÔN HỌCTrang NguyễnNo ratings yet
- Do An MAUDocument22 pagesDo An MAUduy trầnNo ratings yet
- đồ án mạch đo nhiệt độ dung LM35 và 89S52Document50 pagesđồ án mạch đo nhiệt độ dung LM35 và 89S52Cậu Hai Họ Huỳnh100% (2)
- KĨ THUẬT VXLDocument15 pagesKĨ THUẬT VXLNguyễn KhoaNo ratings yet
- Bao Cao He Thong Nhung Nhom 8Document42 pagesBao Cao He Thong Nhung Nhom 8Kiên NguyễnNo ratings yet
- Báo Cáo Cảm Biến Nhóm 9- Mới NhấtDocument39 pagesBáo Cáo Cảm Biến Nhóm 9- Mới NhấtCông TùngNo ratings yet
- Do Tan So Hien Thi LCDDocument34 pagesDo Tan So Hien Thi LCDbangNo ratings yet
- Lich Van Niên Dùng PICDocument23 pagesLich Van Niên Dùng PICThanhha NguyenNo ratings yet
- Iot v6Document43 pagesIot v6Công Luận TrìnhNo ratings yet
- Thu 1Document10 pagesThu 1Nguyễn Bảo Trung100% (1)
- (123doc) Dong Ho Thoi Gian Thuc Ds1307Document63 pages(123doc) Dong Ho Thoi Gian Thuc Ds1307Ngọc LâmNo ratings yet
- " Thiết kế và thi công mạch đo điện áp một chiều, hiển thị Led 7 thanh".Document39 pages" Thiết kế và thi công mạch đo điện áp một chiều, hiển thị Led 7 thanh".Nguyen Van Thuong Nguyen100% (7)
- (123doc) - 8051-Tuoi-Cay-Tu-Dong-Dung-Vi-Dieu-Khien-8051-Anh-Sang-Nhiet-Do-Do-AmDocument45 pages(123doc) - 8051-Tuoi-Cay-Tu-Dong-Dung-Vi-Dieu-Khien-8051-Anh-Sang-Nhiet-Do-Do-AmThành Trần BáNo ratings yet
- Vixuly 19C1DDT2 Nguyenvuthinh 19002016Document27 pagesVixuly 19C1DDT2 Nguyenvuthinh 19002016Nguyen Vu ThinhNo ratings yet
- Thiết kế chế tạo mạch đo và hiển thị cường độ từ trường trên LCDDocument29 pagesThiết kế chế tạo mạch đo và hiển thị cường độ từ trường trên LCDThanhha NguyenNo ratings yet
- Báo Cáo Đ NG Cơ Bư CDocument11 pagesBáo Cáo Đ NG Cơ Bư C20020569No ratings yet
- (123doc) Dieu Khien Toc Do Dong Co Su Dung HSC Pid PLC s7 1200Document49 pages(123doc) Dieu Khien Toc Do Dong Co Su Dung HSC Pid PLC s7 1200Ngọc TiếnNo ratings yet
- Robot Dò LineDocument27 pagesRobot Dò LineQuảng Lê XuânNo ratings yet
- (123doc) - 1653053968Document25 pages(123doc) - 1653053968Nè GióNo ratings yet
- Do An Vi Dieu KhienDocument21 pagesDo An Vi Dieu KhienThi Minh NhựtNo ratings yet
- Project TKHTSDocument15 pagesProject TKHTSĐạt Nguyễn XuânNo ratings yet
- Gioithieu 89v51Document17 pagesGioithieu 89v51api-3803856100% (2)
- Đinh Ngọc Anh 20020569Document18 pagesĐinh Ngọc Anh 2002056920020569No ratings yet
- đồ án đo lường điện tửDocument42 pagesđồ án đo lường điện tửPhu NguyenNo ratings yet
- TIỂU LUẬN - nhóm12Document12 pagesTIỂU LUẬN - nhóm12Duy NguyễnNo ratings yet
- hệ thống điều khiển quạt gió cánh phẳngDocument28 pageshệ thống điều khiển quạt gió cánh phẳngDuy LânNo ratings yet
- Bài tập lớn nhóm 5Document26 pagesBài tập lớn nhóm 5Huy NguyễnNo ratings yet
- AdverDocument1 pageAdverpet an anhjooNo ratings yet
- Tai Lieu Lap Trinh PLC S7-200 - FullDocument94 pagesTai Lieu Lap Trinh PLC S7-200 - Fullgiang97100% (1)
- 301 Cau Dam Thoai Tieng HoaDocument406 pages301 Cau Dam Thoai Tieng HoaThanh TríNo ratings yet
- Exersice and Application 2Document13 pagesExersice and Application 2Dat NguyenNo ratings yet
- He Thong Bai Tap PLC Co BanDocument13 pagesHe Thong Bai Tap PLC Co Banlinhk43No ratings yet
- 23 lỗi thường gặp ở Biến Tần SiemensDocument8 pages23 lỗi thường gặp ở Biến Tần SiemenscholachaNo ratings yet
- 1000 CÂU HỎI ĐÁP TIẾNG TRUNG THÔNG DỤNG NHẤTDocument83 pages1000 CÂU HỎI ĐÁP TIẾNG TRUNG THÔNG DỤNG NHẤTPhương Linh BùiNo ratings yet
- Microsoft Word MR J4 Instruction Manual1Document558 pagesMicrosoft Word MR J4 Instruction Manual1Tài TrầnNo ratings yet
- Từ điển HSK 9 cấp (Cấp 4)Document34 pagesTừ điển HSK 9 cấp (Cấp 4)Thanh TríNo ratings yet
- Từ vựng tiếng trung trong cuộc sốngDocument23 pagesTừ vựng tiếng trung trong cuộc sốngThanh TríNo ratings yet
- 600 hsk3Document16 pages600 hsk3Thanh TríNo ratings yet
- Tu Vung HSK 4Document18 pagesTu Vung HSK 4Thanh TríNo ratings yet
- Từ điển HSK 9 cấp (Cấp 3)Document36 pagesTừ điển HSK 9 cấp (Cấp 3)Thanh TríNo ratings yet
- Tu Vung HSK 5Document43 pagesTu Vung HSK 5Chien Chieu100% (1)
- Tu Vung HSK 123Document19 pagesTu Vung HSK 123Hiếu KyleNo ratings yet
- Tiêu chuẩn IEC trong ứng dụng thực tế - ETE GUIDEDocument7 pagesTiêu chuẩn IEC trong ứng dụng thực tế - ETE GUIDEThanh TríNo ratings yet
- 1 Các lệnh lập trình giản đồ thang cơ bản RSLogix 5000Document38 pages1 Các lệnh lập trình giản đồ thang cơ bản RSLogix 5000Tùng Nino50% (14)
- Tieuluan Cam Bien Do LuongDocument13 pagesTieuluan Cam Bien Do LuongThanh TríNo ratings yet
- 600 hsk3Document16 pages600 hsk3Thanh TríNo ratings yet
- Tu Vung HSK 4Document18 pagesTu Vung HSK 4Thanh TríNo ratings yet
- Tu Vung HSK 4Document18 pagesTu Vung HSK 4Thanh TríNo ratings yet
- 200-Tu-Vung-Tieng-Anh-Chuyen-Nganh-Dien - (Cuuduongthancong - Com)Document6 pages200-Tu-Vung-Tieng-Anh-Chuyen-Nganh-Dien - (Cuuduongthancong - Com)Thanh TríNo ratings yet
- SaddDocument1 pageSaddThanh TríNo ratings yet
- Bai Giang Suc Ben Vat LieuDocument86 pagesBai Giang Suc Ben Vat LieuToanVoNo ratings yet
- Dong Hoc Nguoc RobotDocument9 pagesDong Hoc Nguoc Robothoanglongvnu43% (7)
- Do An1 Dieu Khien Dong Co BuocDocument19 pagesDo An1 Dieu Khien Dong Co BuocThanh TríNo ratings yet
- 23 lỗi thường gặp ở Biến Tần SiemensDocument8 pages23 lỗi thường gặp ở Biến Tần SiemenscholachaNo ratings yet
- RobotDocument7 pagesRobotThanh TríNo ratings yet