You might also like
- Citect SCADA 2018 R2 - Configuration - Study GuideDocument19 pagesCitect SCADA 2018 R2 - Configuration - Study GuideAlex Sales0% (1)
- CasesDocument8 pagesCasesLinh TrịnhNo ratings yet
- MWD Sonny ClassDocument52 pagesMWD Sonny ClassZULFAKHRIBINZAKARIA100% (1)
- Antenna Product Specifications: SLU1278S6Document8 pagesAntenna Product Specifications: SLU1278S6camilo andres ToroNo ratings yet
- Flexible Instruction Delivery Plan Template CONTENT 5Document2 pagesFlexible Instruction Delivery Plan Template CONTENT 5Edward Barber100% (3)
- IG GeophysicsDocument50 pagesIG Geophysicssukri arjunaNo ratings yet
- LoPresti and O'Neill (1991) LABORATORY INVESTIGATION OF SMALL STRAIN MODULUS ANISOTROPY IN SAND-211-222Document12 pagesLoPresti and O'Neill (1991) LABORATORY INVESTIGATION OF SMALL STRAIN MODULUS ANISOTROPY IN SAND-211-222Cesar Felipe Jimenez SantiagoNo ratings yet
- Ground Motion HazardsDocument68 pagesGround Motion HazardsSuneesh PNo ratings yet
- Topic 2.1 Dr. KamruzzamanDocument70 pagesTopic 2.1 Dr. KamruzzamanCEG BangladeshNo ratings yet
- VW Strain Gauge 2017 1Document4 pagesVW Strain Gauge 2017 1BuiDucVinhNo ratings yet
- Greve 2005Document12 pagesGreve 2005Emotional V.I.PNo ratings yet
- Geophysical LectureDocument49 pagesGeophysical LectureBilal Akram BNo ratings yet
- Performance Study For Reinforced Concrete Bridge Piers Considering Seismic Capacity and DemandDocument37 pagesPerformance Study For Reinforced Concrete Bridge Piers Considering Seismic Capacity and DemandAslam KyonNo ratings yet
- RS 03Document7 pagesRS 03Essenam GOLINo ratings yet
- Report - P and S Wave Velocity Logging at D-01 and D-02.V2Document11 pagesReport - P and S Wave Velocity Logging at D-01 and D-02.V222dr0102No ratings yet
- Ground Grid Input DataDocument2 pagesGround Grid Input DataMuhammad Ihsan SNo ratings yet
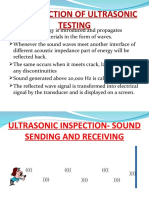
- Introduction of Ultrasonic TestingDocument70 pagesIntroduction of Ultrasonic TestingMAXX ENGINEERS100% (1)
- 2 - Irregular Ocean WavesDocument23 pages2 - Irregular Ocean WavesJofin LukoseNo ratings yet
- Seismic Inversion PDFDocument73 pagesSeismic Inversion PDFAiman Zaini100% (1)
- Copia de Laubscher 12c Base (8965)Document44 pagesCopia de Laubscher 12c Base (8965)JuanOrtizEsquivelNo ratings yet
- C 2000Document1 pageC 2000Anonymous lv8SNRyNo ratings yet
- Session 2a 1120amDocument50 pagesSession 2a 1120amLINDO PANTI RAMOSNo ratings yet
- C 750Document7 pagesC 750Anonymous lv8SNRyNo ratings yet
- Inductor Automotive Power Spm5030-Hz enDocument4 pagesInductor Automotive Power Spm5030-Hz enJulio J. Rodríguez GarcíaNo ratings yet
- WindDocument33 pagesWindnfaayedNo ratings yet
- Design of Lining For A Mine Shaft and Decline Using Numerical Modelling TechniquesDocument38 pagesDesign of Lining For A Mine Shaft and Decline Using Numerical Modelling TechniquesPraphulJainNo ratings yet
- C 600Document13 pagesC 600Anonymous lv8SNRyNo ratings yet
- Empirical Estimation of Soil Unit Weight and Undrained Shear Strength From Shear Wave Velocity MeasurementsDocument22 pagesEmpirical Estimation of Soil Unit Weight and Undrained Shear Strength From Shear Wave Velocity MeasurementseiudkNo ratings yet
- Active and Passive Surface Wave TechniquesDocument5 pagesActive and Passive Surface Wave TechniquesFlorina PopNo ratings yet
- C 2050Document1 pageC 2050Anonymous lv8SNRyNo ratings yet
- 8 - Radar 2Document88 pages8 - Radar 2Ali NasiriNo ratings yet
- C 1350Document1 pageC 1350Anonymous lv8SNRyNo ratings yet
- Directional Drilling OverviewDocument10 pagesDirectional Drilling OverviewHamed YousifNo ratings yet
- Innovations in Biplanar Geonet Structure to Increase Flow Rate and Compressive StrengthDocument47 pagesInnovations in Biplanar Geonet Structure to Increase Flow Rate and Compressive StrengthJavier DiazNo ratings yet
- Seismic Inversion for Reservoir CharacterizationDocument54 pagesSeismic Inversion for Reservoir CharacterizationJason Enduro BayuNo ratings yet
- PPTDocument15 pagesPPThngfhgfNo ratings yet
- 3.4 Pushover AnalysisDocument40 pages3.4 Pushover AnalysisKetanNo ratings yet
- Survey&Mwd& LWD 2Document75 pagesSurvey&Mwd& LWD 2Maathad alruqeishiNo ratings yet
- Comparison Between Resilient Modulus and Dynamic Modulus of Western Australian 2Document16 pagesComparison Between Resilient Modulus and Dynamic Modulus of Western Australian 2aakash singhNo ratings yet
- C 300Document25 pagesC 300Anonymous lv8SNRyNo ratings yet
- (Andreas Cordsen, Mike Galbraith, John Peirce, Bob (BookFi)Document26 pages(Andreas Cordsen, Mike Galbraith, John Peirce, Bob (BookFi)HarshNo ratings yet
- Propagation and Attenuation Characteristics of Various Ground VibrationsDocument12 pagesPropagation and Attenuation Characteristics of Various Ground VibrationsTony Christian Canahua ChoquezaNo ratings yet
- C 2200Document1 pageC 2200Anonymous lv8SNRyNo ratings yet
- Integration of Well and Seismic Data Using Geostatistics-2Document101 pagesIntegration of Well and Seismic Data Using Geostatistics-2qbirax100% (1)
- IADC/SPE 87977 MWD Survey Accuracy Improvements Using Multistation AnalysisDocument15 pagesIADC/SPE 87977 MWD Survey Accuracy Improvements Using Multistation AnalysisAzizaga AxmedovNo ratings yet
- Seismic Risk and Damage Cost Evaluation of Base Isolated BuildingsDocument8 pagesSeismic Risk and Damage Cost Evaluation of Base Isolated Buildingsjody setiawanNo ratings yet
- By E Ement: Over ForDocument1 pageBy E Ement: Over ForUjwal KhandokarNo ratings yet
- C 1400Document1 pageC 1400Anonymous lv8SNRyNo ratings yet
- BBAAV Abs2Document4 pagesBBAAV Abs2Tps TaquillaNo ratings yet
- The Use of Microtremors For The Definition of Soil Properties and Bedrock Depth in An Urban AreaDocument14 pagesThe Use of Microtremors For The Definition of Soil Properties and Bedrock Depth in An Urban AreamdnghtgoldNo ratings yet
- C 1450Document1 pageC 1450Anonymous lv8SNRyNo ratings yet
- 9 - Log SonikDocument30 pages9 - Log SonikMuhammad MufarridNo ratings yet
- Well Logging Chapter 1Document138 pagesWell Logging Chapter 1YDF100% (1)
- Wind Resource Assessment Site MeasurementsDocument21 pagesWind Resource Assessment Site MeasurementsreysNo ratings yet
- Check SCDocument22 pagesCheck SCNhuVan NguyenNo ratings yet
- Spin Dependent Tunneling (SDT) Sensors for Magnetic Anomaly DetectionDocument19 pagesSpin Dependent Tunneling (SDT) Sensors for Magnetic Anomaly DetectionSekwah HawkesNo ratings yet
- IA Earthing Calculations BS 7430 +A1 2015 EEADocument17 pagesIA Earthing Calculations BS 7430 +A1 2015 EEAAhmed IbrahimNo ratings yet
- JasukeDocument17 pagesJasukeYesyurun SetyanisaNo ratings yet
- BCH Mini Limit SwitchDocument6 pagesBCH Mini Limit SwitchJayesh MewadaNo ratings yet
- Vibration and Air-Overpressure Handout - October 2013Document21 pagesVibration and Air-Overpressure Handout - October 2013Ashish DasNo ratings yet
- Masw 2Document16 pagesMasw 2Dagmer CondoriNo ratings yet
- Acoustic Wave Sensors: Theory, Design and Physico-Chemical ApplicationsFrom EverandAcoustic Wave Sensors: Theory, Design and Physico-Chemical ApplicationsNo ratings yet
- 7HDocument1 page7HKavan Gt12No ratings yet
- GRLDocument15 pagesGRLKavan Gt12100% (1)
- KC Determination of Total Soluble Solids PDFDocument10 pagesKC Determination of Total Soluble Solids PDFKavan Gt12No ratings yet
- Kim, KDM, Sim, SDM PDFDocument12 pagesKim, KDM, Sim, SDM PDFKavan Gt12No ratings yet
- Avika Determination of Total Soluble Solids PDFDocument10 pagesAvika Determination of Total Soluble Solids PDFKavan Gt12No ratings yet
- Cyber VirusDocument7 pagesCyber VirusKavan Gt12No ratings yet
- Cyber VirusDocument7 pagesCyber VirusKavan Gt12No ratings yet
- ReeseDocument1 pageReeseKavan Gt12No ratings yet
- Semi-Empirical Procedures For Evaluating Liquefaction Potential, Idriss & Boulanger, 2004Document26 pagesSemi-Empirical Procedures For Evaluating Liquefaction Potential, Idriss & Boulanger, 2004hugojameswoodNo ratings yet
- 6.6. DR Riven Pile La Ateral Load - Deflection ( (P-Y) Respon NsesDocument1 page6.6. DR Riven Pile La Ateral Load - Deflection ( (P-Y) Respon NsesKavan Gt12No ratings yet
- New Text DocumentDocument1 pageNew Text DocumentKavan Gt12No ratings yet
- Mechanisms For Geological Carbon Sequestration: SciencedirectDocument9 pagesMechanisms For Geological Carbon Sequestration: SciencedirectKavan Gt12No ratings yet
- GCSDocument32 pagesGCSKavan Gt12No ratings yet
- WHP Carbon SequestrationDocument21 pagesWHP Carbon SequestrationKavan Gt12No ratings yet
- WHP Carbon SequestrationDocument21 pagesWHP Carbon SequestrationKavan Gt12No ratings yet
- CO Sequestration in Basaltic Rocks in Iceland: Development of A Piston-Type Downhole Sampler For CO Rich Fluids and TracersDocument8 pagesCO Sequestration in Basaltic Rocks in Iceland: Development of A Piston-Type Downhole Sampler For CO Rich Fluids and TracersKavan Gt12No ratings yet
- CPT Based Relative DensityDocument6 pagesCPT Based Relative DensityKavan Gt12No ratings yet
- Carbon SequestrationDocument39 pagesCarbon SequestrationKavan Gt12No ratings yet
- 4 - ASR9K XR Intro Routing and RPL PDFDocument42 pages4 - ASR9K XR Intro Routing and RPL PDFhem777No ratings yet
- Factors Influencing Consumer Behavior and Marketing Plan ComponentsDocument6 pagesFactors Influencing Consumer Behavior and Marketing Plan ComponentsK59 Ng� V? Minh Th?No ratings yet
- Describe The Financial and Non-Financial Benefits of Strategic Management 4.1 Financial Benefits of Strategic ManagementDocument3 pagesDescribe The Financial and Non-Financial Benefits of Strategic Management 4.1 Financial Benefits of Strategic ManagementAlemayehu Demeke80% (5)
- Slimline F96T12 DX Alto: Product Family Description T12 Single Pin Linear Fluorescent LampsDocument2 pagesSlimline F96T12 DX Alto: Product Family Description T12 Single Pin Linear Fluorescent LampsJon GosnellNo ratings yet
- Delphi28236381 20190611 112907Document2 pagesDelphi28236381 20190611 112907คุณชายธวัชชัย เจริญสุขNo ratings yet
- Nevada Reports 1882-1883 (17 Nev.) PDFDocument334 pagesNevada Reports 1882-1883 (17 Nev.) PDFthadzigsNo ratings yet
- Nasrullah March23Document11 pagesNasrullah March23Angellin JoiceNo ratings yet
- CHEM F313: Instrumental Methods of AnalysisDocument12 pagesCHEM F313: Instrumental Methods of AnalysisAYUSH SHARMANo ratings yet
- The Future of Retail in Asia-Pacific: How To Thrive at High SpeedDocument12 pagesThe Future of Retail in Asia-Pacific: How To Thrive at High SpeedPhạm Thanh HuyềnNo ratings yet
- ASSIGNMENTDocument5 pagesASSIGNMENTClifford Jay CalihatNo ratings yet
- BSW, BS,,AF, BA and Metric Tool SizeDocument4 pagesBSW, BS,,AF, BA and Metric Tool SizeUNES100% (1)
- Haukongo Nursing 2020Document86 pagesHaukongo Nursing 2020Vicky Torina ShilohNo ratings yet
- Llave de Impacto PDFDocument21 pagesLlave de Impacto PDFmasterfiera1No ratings yet
- L4. LO2. Safekeep Dispose Tools, Materials and OutfitDocument77 pagesL4. LO2. Safekeep Dispose Tools, Materials and OutfitGiedon Quiros73% (15)
- Lista Carti Audio Dezvoltare PersonalaDocument4 pagesLista Carti Audio Dezvoltare PersonalaNicu Osan50% (2)
- Industry Standard: What Are The Benefits For You?Document4 pagesIndustry Standard: What Are The Benefits For You?Zarnimyomyint MyintNo ratings yet
- TerrSet TutorialDocument470 pagesTerrSet TutorialMoises Gamaliel Lopez Arias100% (1)
- AfghanistanLML OnlinDocument117 pagesAfghanistanLML Onlinعارف حسینNo ratings yet
- Title Page - Super King Air C90CGTi FusionDocument2 pagesTitle Page - Super King Air C90CGTi Fusionsergio0% (1)
- HOUSEKEEPING SESSION PLANDocument2 pagesHOUSEKEEPING SESSION PLANScarlette Beauty Enriquez100% (1)
- Analyzing Air Asia in Business Competition Era: AirasiaDocument14 pagesAnalyzing Air Asia in Business Competition Era: Airasiashwaytank10No ratings yet
- Ficha Técnica Lithonia-JcblDocument9 pagesFicha Técnica Lithonia-JcblEmiliano HernándezNo ratings yet
- Acquisition of SharesDocument3 pagesAcquisition of SharesChaudhary Mohsin RazaNo ratings yet
- Baja2018 Unisa Team3 Design ReportDocument23 pagesBaja2018 Unisa Team3 Design ReportDaniel MabengoNo ratings yet
- Hydrogen Plant For The New MillenniumDocument21 pagesHydrogen Plant For The New Millenniumapi-3799861100% (2)
- ACL Reconstruction BookDocument18 pagesACL Reconstruction BookSergejs JaunzemsNo ratings yet
- 5s Audit ChecklistDocument2 pages5s Audit ChecklistHOUSSEM nASRINo ratings yet