You might also like
- Solution Manual for an Introduction to Equilibrium ThermodynamicsFrom EverandSolution Manual for an Introduction to Equilibrium ThermodynamicsNo ratings yet
- SATURACIÓN IEC 61869-100. Ejemplo 5.2.1: M VA VADocument18 pagesSATURACIÓN IEC 61869-100. Ejemplo 5.2.1: M VA VAJIMENEZPS100% (1)
- ALSTOM CT Calculation GuideDocument2 pagesALSTOM CT Calculation GuideYogesh Patil100% (1)
- CT SelectionDocument27 pagesCT SelectionNoli OtebaNo ratings yet
- EIS BoukampDocument97 pagesEIS BoukampMiraldaNo ratings yet
- Pathophysiology of Myocardial InfarctionDocument2 pagesPathophysiology of Myocardial Infarctionkobe_andre15100% (28)
- 02 - Instrument TransducerDocument63 pages02 - Instrument TransducerFarzana GhazaliNo ratings yet
- Knee Point Voltage Calc For Motor DiffrentialDocument1 pageKnee Point Voltage Calc For Motor DiffrentialkittyNo ratings yet
- Approval Setting P142 - CBB-dikonversiDocument5 pagesApproval Setting P142 - CBB-dikonversiNurul MukhlisiahNo ratings yet
- Alf CTDocument9 pagesAlf CTadityahivalkar4141No ratings yet
- CT ClassDocument7 pagesCT ClassVinod KumarNo ratings yet
- Saturación: M VA VADocument9 pagesSaturación: M VA VAJIMENEZPSNo ratings yet
- CT Wire SizingDocument28 pagesCT Wire SizingbookreaderAU100% (1)
- Silicon NPN Epitaxial, Darlington: ApplicationDocument8 pagesSilicon NPN Epitaxial, Darlington: ApplicationAsep OsenkNo ratings yet
- P543-CT Adequacy Check-C110Document2 pagesP543-CT Adequacy Check-C110kumarNo ratings yet
- P3APS17013EN Current Transformer Selection For Easergy P3 RelaysDocument8 pagesP3APS17013EN Current Transformer Selection For Easergy P3 RelaysMahmoud Chiheb100% (1)
- CTA Full PDFDocument79 pagesCTA Full PDFsherif ahmed moussaNo ratings yet
- Knee Point Voltage Calculation: DataDocument1 pageKnee Point Voltage Calculation: DataPRATHAM SARANNo ratings yet
- Compression Load Cell Inteco, Converter Connexx, Mounting Kits PR 6001, PR 614xDocument7 pagesCompression Load Cell Inteco, Converter Connexx, Mounting Kits PR 6001, PR 614xYuli antoNo ratings yet
- Calculation For CT SelectionDocument18 pagesCalculation For CT Selectionmithun46100% (2)
- PDO Course 2Document67 pagesPDO Course 21MM1R HL'No ratings yet
- TR118B1L Revised 31 1Document6 pagesTR118B1L Revised 31 1M DuraiNo ratings yet
- ANGEN - EN006 Current Transformer Selection For VAMP Series Overcurrent and Differential Relays PDFDocument8 pagesANGEN - EN006 Current Transformer Selection For VAMP Series Overcurrent and Differential Relays PDFRicardo BozoNo ratings yet
- Calculation 003Document4 pagesCalculation 003Ashirvad RathNo ratings yet
- CT CALC-093-GS-11kV-BDocument36 pagesCT CALC-093-GS-11kV-Bmadhavan100% (1)
- G4PC40UDocument10 pagesG4PC40URICHIHOTS2No ratings yet
- Relay Testing ProcedureDocument144 pagesRelay Testing ProcedureLawrence Alex100% (1)
- Module 02: Sinusoidal Steady State Analysis, Part 2Document53 pagesModule 02: Sinusoidal Steady State Analysis, Part 2Jos Hua MaNo ratings yet
- Super Fast Recovery Diode: Data SheetDocument7 pagesSuper Fast Recovery Diode: Data SheetYogi SaputraNo ratings yet
- Rfn10ns4s UnlockedDocument7 pagesRfn10ns4s Unlockedathirah96No ratings yet
- ®byt 12pi-1000Document5 pages®byt 12pi-1000Pablo AllosiaNo ratings yet
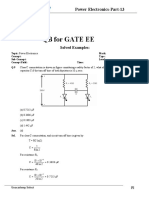
- QB For Gate Ee: Power Electronics-Part-13Document9 pagesQB For Gate Ee: Power Electronics-Part-13shivang agrawalNo ratings yet
- REF Setting Calculation - LEW Endorsed 221015Document4 pagesREF Setting Calculation - LEW Endorsed 221015Wong Chiun LiangNo ratings yet
- 1.5 CT Dimensioning For Protection Relay ANSI Code 87BB/50BF: Appl. Core 5Document4 pages1.5 CT Dimensioning For Protection Relay ANSI Code 87BB/50BF: Appl. Core 5arafinNo ratings yet
- Lec01 2Document82 pagesLec01 2awabnasirahmednasirNo ratings yet
- F.1 12kV Busbar Discriminating Zones ProtectionDocument1 pageF.1 12kV Busbar Discriminating Zones Protectionimtiaz_uddin_2No ratings yet
- Relay SettingsDocument7 pagesRelay Settingsgulatimanish1985No ratings yet
- II.1 AS-shate-Jalawiyyah Line Protn Set - 1Document6 pagesII.1 AS-shate-Jalawiyyah Line Protn Set - 1Jay WinNo ratings yet
- Stsa 1805Document8 pagesStsa 1805Di ZhangNo ratings yet
- TO-92 Plastic-Encapsulate Transistors: Jiangsu Changjiang Electronics Technology Co.,LtdDocument2 pagesTO-92 Plastic-Encapsulate Transistors: Jiangsu Changjiang Electronics Technology Co.,LtdNguyenKhanh111No ratings yet
- FFPF10U60DN FairDocument4 pagesFFPF10U60DN Fairалексей ЛфNo ratings yet
- IRG4BC20KD DatasheetDocument11 pagesIRG4BC20KD DatasheetjoaomimaNo ratings yet
- RL RC CircuitsDocument29 pagesRL RC CircuitsKrishnaveni Subramani SNo ratings yet
- BEF Calculation - Part 3 PDFDocument8 pagesBEF Calculation - Part 3 PDFLin HengNo ratings yet
- Annexure I Relay Details For Selection of Instrument TransformersDocument16 pagesAnnexure I Relay Details For Selection of Instrument Transformersdipu_eeeNo ratings yet
- Arfken MMCH 7 S 2 e 1Document2 pagesArfken MMCH 7 S 2 e 1HassanNo ratings yet
- 3.5.4. Directional Definite Time Overcurrent Protection (Dircurrentdt)Document7 pages3.5.4. Directional Definite Time Overcurrent Protection (Dircurrentdt)Alex asherNo ratings yet
- Solve Problems in RC Series CircuitsDocument6 pagesSolve Problems in RC Series CircuitsAmer ArtesanoNo ratings yet
- HW 4 ADocument8 pagesHW 4 ABelayneh Tadesse100% (1)
- C.T Knee Point Voltage CalculationDocument2 pagesC.T Knee Point Voltage Calculationkapil100% (2)
- F10U60SDocument4 pagesF10U60SWiliGonzálezNo ratings yet
- Report Source FreeDocument43 pagesReport Source FreeCliford AlbiaNo ratings yet
- Over Current and Earth Fault ProtectionDocument13 pagesOver Current and Earth Fault ProtectionSaravanan PNo ratings yet
- Short Circuit CalculationDocument11 pagesShort Circuit CalculationCatrina FedericoNo ratings yet
- Byw29 200Document6 pagesByw29 200isaiasvaNo ratings yet
- CT Doubt AnswersDocument4 pagesCT Doubt AnswerssathiyaseelanNo ratings yet
- Exercises in Electronics: Operational Amplifier CircuitsFrom EverandExercises in Electronics: Operational Amplifier CircuitsRating: 3 out of 5 stars3/5 (1)
- Newnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1From EverandNewnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1Rating: 4.5 out of 5 stars4.5/5 (3)
- ConstructionRegulation ConsDocument127 pagesConstructionRegulation ConsanuragpugaliaNo ratings yet
- Copper-And-Alluminium-Xlpe-Cable Short Circuit CurentDocument1 pageCopper-And-Alluminium-Xlpe-Cable Short Circuit CurentanuragpugaliaNo ratings yet
- Schneider Hybrid DCSDocument13 pagesSchneider Hybrid DCSanuragpugaliaNo ratings yet
- 132 Line Tiil 2020 (Rajasthan)Document9 pages132 Line Tiil 2020 (Rajasthan)anuragpugaliaNo ratings yet
- Polycab EHV Brochure - Low ResDocument60 pagesPolycab EHV Brochure - Low ResanuragpugaliaNo ratings yet
- Types of Lightning Arresters - Circuit GlobeDocument9 pagesTypes of Lightning Arresters - Circuit GlobeanuragpugaliaNo ratings yet
- IS 1180 Energy Efficiency Level 3 Transformer Manufacturer IndiaDocument9 pagesIS 1180 Energy Efficiency Level 3 Transformer Manufacturer IndiaanuragpugaliaNo ratings yet
- HYDROCAL 1011 Genx P English - R04 (02.2021)Document4 pagesHYDROCAL 1011 Genx P English - R04 (02.2021)anuragpugaliaNo ratings yet
- Surge Protective Device Types - Type 1, Type 2, Type 3, Type 4Document3 pagesSurge Protective Device Types - Type 1, Type 2, Type 3, Type 4anuragpugaliaNo ratings yet
- Technical Specification and NIT-2022-11!04!10!40!16Document139 pagesTechnical Specification and NIT-2022-11!04!10!40!16anuragpugaliaNo ratings yet
- 132 GSS - RajasthanDocument9 pages132 GSS - RajasthananuragpugaliaNo ratings yet
- RMP 112d Installation InstructDocument4 pagesRMP 112d Installation InstructanuragpugaliaNo ratings yet
- A70-FAQ From Transformer Users - Part 1 - LinkedInDocument10 pagesA70-FAQ From Transformer Users - Part 1 - LinkedInanuragpugaliaNo ratings yet
- A 62-Transformers For Photovoltaic Solar Projects - Part 1 - LinkedInDocument13 pagesA 62-Transformers For Photovoltaic Solar Projects - Part 1 - LinkedInanuragpugaliaNo ratings yet
- Ni-Cd Battery Sizing Calculation (IEEE 1115)Document2 pagesNi-Cd Battery Sizing Calculation (IEEE 1115)anuragpugaliaNo ratings yet
- A 66 - Types of Transformers - Part 3 - LinkedInDocument14 pagesA 66 - Types of Transformers - Part 3 - LinkedInanuragpugaliaNo ratings yet
- PO1660 (Oil Filtration)Document68 pagesPO1660 (Oil Filtration)anuragpugaliaNo ratings yet
- 03 2006 Ja PS 1 020Document11 pages03 2006 Ja PS 1 020anuragpugaliaNo ratings yet
- Trefoil Cable ClampDocument4 pagesTrefoil Cable ClampanuragpugaliaNo ratings yet
- 2667 SpecDocument27 pages2667 SpecanuragpugaliaNo ratings yet
- Short Circuit Rating of MV Bus BarDocument2 pagesShort Circuit Rating of MV Bus BaranuragpugaliaNo ratings yet
- Sukanya Samriddhi Account Excel Calculator DownloadDocument3 pagesSukanya Samriddhi Account Excel Calculator DownloadanuragpugaliaNo ratings yet
- M8300 - 8400 Instruction BookDocument16 pagesM8300 - 8400 Instruction BookanuragpugaliaNo ratings yet
- Tender Notification 008Document547 pagesTender Notification 008anuragpugaliaNo ratings yet
- Technical Specification 315 MVA 400/220KV AUTO Transformer FOR All Projects Except World Bank and Jbic ProjectsDocument46 pagesTechnical Specification 315 MVA 400/220KV AUTO Transformer FOR All Projects Except World Bank and Jbic ProjectsanuragpugaliaNo ratings yet
- Abb Specifcation Section 16340Document6 pagesAbb Specifcation Section 16340anuragpugaliaNo ratings yet
- IntroductionDocument10 pagesIntroductionapi-416865625No ratings yet
- Business Plan 28Document21 pagesBusiness Plan 28TintrintinNo ratings yet
- Natural Hygiene Part 2 - The Miracle of FastingDocument3 pagesNatural Hygiene Part 2 - The Miracle of Fastingraweater75% (4)
- Problem Set Chapter 1,2 and 4Document3 pagesProblem Set Chapter 1,2 and 4audursua1025No ratings yet
- 1301 RDH 102 75 3 RevEDocument71 pages1301 RDH 102 75 3 RevEds temporalNo ratings yet
- Anthropology: Gio Pabualan Jerome Quitoriano Ralf PlacidoDocument14 pagesAnthropology: Gio Pabualan Jerome Quitoriano Ralf PlacidoYannel VillaberNo ratings yet
- Terberg Benschop Yt182 222 Yard Tractor BC 182 Body Carrier Electrical Wiring DiagramDocument22 pagesTerberg Benschop Yt182 222 Yard Tractor BC 182 Body Carrier Electrical Wiring Diagramkathleenterry260595mjz97% (31)
- V3 ASTM Dimensioans Section PropertiesDocument19 pagesV3 ASTM Dimensioans Section PropertiesFederico.IoriNo ratings yet
- Enel3de A Syncronous Sequential DesignDocument32 pagesEnel3de A Syncronous Sequential DesignPapiki RadebeNo ratings yet
- Q4 FoC GRADE-10 PER SUBJECT PERIODIC TEST RESULTS-REPORT-2022-2023Document2 pagesQ4 FoC GRADE-10 PER SUBJECT PERIODIC TEST RESULTS-REPORT-2022-2023Xavier VergaraNo ratings yet
- SP Unit 2Document38 pagesSP Unit 2Hrithik MuskanNo ratings yet
- Psychology in EducationDocument22 pagesPsychology in EducationHeena SharmaNo ratings yet
- WorldCom Accounting ScandalDocument30 pagesWorldCom Accounting ScandalLari Jean Gallos100% (1)
- Common and Conflicting Interests in The EngagementDocument12 pagesCommon and Conflicting Interests in The EngagementJuliansyah Rahmat MaulanaNo ratings yet
- PH Module-4 Work-Habits FINAL May-2017Document24 pagesPH Module-4 Work-Habits FINAL May-2017Christian Surio Ramos100% (1)
- Darwin WorksheetDocument2 pagesDarwin WorksheetjcrawlinsNo ratings yet
- Lesson Plan Grade 1Document4 pagesLesson Plan Grade 1Nhuquyen NguyenNo ratings yet
- Commercialization of New Technology-Based Product: Unit 8Document35 pagesCommercialization of New Technology-Based Product: Unit 8terlojitanNo ratings yet
- Coulter, 2014 Strength-Based For Trauma YoungstersDocument18 pagesCoulter, 2014 Strength-Based For Trauma YoungstersLorena LeylerNo ratings yet
- PhysicsDocument8 pagesPhysicsprakriti enterprises bbkNo ratings yet
- Exective Summary: The Project Is Basically The Launch of Lipton Ice Tea Under Unilever Pakistan. ItDocument115 pagesExective Summary: The Project Is Basically The Launch of Lipton Ice Tea Under Unilever Pakistan. ItRashid ShahzadNo ratings yet
- Clearance For Graduating 2018-2019Document3 pagesClearance For Graduating 2018-2019Jomarie GarciaNo ratings yet
- Testimony Workshop HandoutDocument7 pagesTestimony Workshop HandoutEquipping CoursesNo ratings yet
- Peaktronics: Digital High-Resolution ControllerDocument12 pagesPeaktronics: Digital High-Resolution Controllerschmal1975No ratings yet
- Jones LXX Notes Feb06Document190 pagesJones LXX Notes Feb06FGNo ratings yet
- The New Curriculum For ALSDocument101 pagesThe New Curriculum For ALSGrover DejucosNo ratings yet
- Approaches To Organizational DesignDocument9 pagesApproaches To Organizational DesignJoanne CareahNo ratings yet
- The Hospital TeamDocument13 pagesThe Hospital Teamanggi oktaNo ratings yet
- It Takes Effort To Look This Good: E X Terior Paint SDocument6 pagesIt Takes Effort To Look This Good: E X Terior Paint SYohanes DitoNo ratings yet