You might also like
- 아날로그집적회로설계Document56 pages아날로그집적회로설계fourier76100% (6)
- SCE K Controller Manual R1 PDFDocument120 pagesSCE K Controller Manual R1 PDF이태수No ratings yet
- Vulkan Tutorial (By SAMSUNG Electronics)Document212 pagesVulkan Tutorial (By SAMSUNG Electronics)atom tuxNo ratings yet
- Switch 실무교육 Fundamental 2일차Document54 pagesSwitch 실무교육 Fundamental 2일차Lyan WNo ratings yet
- 2-1 SE Model N PMDocument6 pages2-1 SE Model N PMHangNo ratings yet
- GSR RVC 관리 계획서 20160111Document6 pagesGSR RVC 관리 계획서 20160111Phạm GiangNo ratings yet
- RCS 사용설명서Document181 pagesRCS 사용설명서rihl205No ratings yet
- 규격서 (GATECYCLE)Document1 page규격서 (GATECYCLE)Onnuri WonNo ratings yet
- cnc용어집Document9 pagescnc용어집Yongkook KimNo ratings yet
- Io 로스트사가 로그인서버구조도Document5 pagesIo 로스트사가 로그인서버구조도結城 ハ ザマNo ratings yet
- Rcs6000 SeriesDocument176 pagesRcs6000 Series이태규0% (1)
- Acservo HizenDocument68 pagesAcservo Hizen박엉아No ratings yet
- Ansoft Solution MotorsDocument70 pagesAnsoft Solution Motorstelonic2006No ratings yet
- Ch 4. HW SW Co design for SoC (최후수정)Document53 pagesCh 4. HW SW Co design for SoC (최후수정)rtccNo ratings yet
- Ch 4. HW SW Co design for SoC (1차완성본)Document54 pagesCh 4. HW SW Co design for SoC (1차완성본)rtccNo ratings yet
- AI-Powered Exploratory App Test in One-ClickDocument34 pagesAI-Powered Exploratory App Test in One-Clickhtmnhung4No ratings yet
- 3-1교시-제어 논리도 (Control Logic Diagram)Document48 pages3-1교시-제어 논리도 (Control Logic Diagram)shjeon73No ratings yet
- HBE RoboCARDocument6 pagesHBE RoboCAR이문곤No ratings yet
- CC-Link Trouble ShootingDocument55 pagesCC-Link Trouble ShootingJinKi LeeNo ratings yet
- VP Governor Dosan - dgc2013Document44 pagesVP Governor Dosan - dgc2013Mizwandi Zuandi -No ratings yet
- mightyZAP 아두이노 API 매뉴얼 - 한글 - 18E20 - V1.1Document29 pagesmightyZAP 아두이노 API 매뉴얼 - 한글 - 18E20 - V1.1서승원No ratings yet
- 1-346-DSP OverviewDocument20 pages1-346-DSP Overviewkimjisung2003No ratings yet
- Project Status3Document13 pagesProject Status3jung-hoon nohNo ratings yet
- 750.RS-KATECH-2012-026 자동차용 전장품 가속스트레스 시험Document16 pages750.RS-KATECH-2012-026 자동차용 전장품 가속스트레스 시험Jungmin ParkNo ratings yet
- GIPAM 2200 한글 카탈로그 1908Document44 pagesGIPAM 2200 한글 카탈로그 1908cd00700No ratings yet
- V1000 CC-LINK Option Technical Manual (국문)Document39 pagesV1000 CC-LINK Option Technical Manual (국문)전병준No ratings yet
- DT기반 설비관리시스템 구축 및 운영성과Document25 pagesDT기반 설비관리시스템 구축 및 운영성과Jinyoung ChoiNo ratings yet
- DAQ MasterDocument18 pagesDAQ MasterAdi kurniantoNo ratings yet
- Battery Charger (Tdc-9030a) ManualDocument15 pagesBattery Charger (Tdc-9030a) Manualauto etrustNo ratings yet
- Sce 032 100 FC Programming s7 1500 r1703 KRDocument51 pagesSce 032 100 FC Programming s7 1500 r1703 KRsklee0730No ratings yet
- 종합 카탈로그Document34 pages종합 카탈로그dandyjohn77No ratings yet
- Electric Power SteeringDocument25 pagesElectric Power Steeringjonghanam1995No ratings yet
- Linux Device DriverDocument288 pagesLinux Device DriveryjmagicNo ratings yet
- Approved Catalogs - Sirocco Fan Double Suction March 2010 - 2010 - 03 - 08 PDFDocument16 pagesApproved Catalogs - Sirocco Fan Double Suction March 2010 - 2010 - 03 - 08 PDFpinenamuNo ratings yet
- 로보스타 - CONTROLLERDocument8 pages로보스타 - CONTROLLERchoihero3329No ratings yet
- Komeco 2015Document27 pagesKomeco 2015Joonki YunNo ratings yet
- Sce 032 200 FB Programming s7 1500 r1703 KRDocument52 pagesSce 032 200 FB Programming s7 1500 r1703 KRsklee0730No ratings yet
- As 127453 KV-3000 KV-5000 KV-7300 Um D12ko KK KR 2052 1Document608 pagesAs 127453 KV-3000 KV-5000 KV-7300 Um D12ko KK KR 2052 1이용상No ratings yet
- Sinamics V90Document2 pagesSinamics V90jmkimNo ratings yet
- 용인 경전철 설명 자료Document46 pages용인 경전철 설명 자료Tom JungNo ratings yet
- Asd SeriesDocument58 pagesAsd Series이태규No ratings yet
- XGL-RMEB T3 Manual V2.8 202107 KRDocument58 pagesXGL-RMEB T3 Manual V2.8 202107 KRlenethNo ratings yet
- TalkFile - AMC Lab PDFDocument24 pagesTalkFile - AMC Lab PDFkimjaeonNo ratings yet
- Keynote An Evolution of Vehicle Control System With SoftwareDocument22 pagesKeynote An Evolution of Vehicle Control System With Softwarejonghanam1995No ratings yet
- Ch 3. Embedded System HW & SW의 구성 요소Document48 pagesCh 3. Embedded System HW & SW의 구성 요소rtccNo ratings yet
- 서보전동기 1장 (서보모터개요)Document46 pages서보전동기 1장 (서보모터개요)joonimNo ratings yet
- plant 건설사업의 업무흐름Document10 pagesplant 건설사업의 업무흐름이재혁No ratings yet
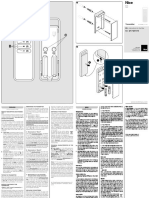
- Transmitter: EN - Instructions for the fitter KO - 설치 기술자 안내Document2 pagesTransmitter: EN - Instructions for the fitter KO - 설치 기술자 안내Aaliyah CsmrtNo ratings yet
- 현대 양면 595WDocument2 pages현대 양면 595Wsw eNo ratings yet
- As 93272 Kv-N14ar Kv-N14at Kv-N16er Um 717ko KK KR 1127 1Document620 pagesAs 93272 Kv-N14ar Kv-N14at Kv-N16er Um 717ko KK KR 1127 1이용상No ratings yet
- IM-DIM-003 Ver.3.0 Æ Þüï ÿÑÕÇö Iray Mars1717V3+Venu1717X DetectorDocument69 pagesIM-DIM-003 Ver.3.0 Æ Þüï ÿÑÕÇö Iray Mars1717V3+Venu1717X DetectorCristian Dante CastroNo ratings yet
- 170410 하이퍼루프ppt 선형모터Document8 pages170410 하이퍼루프ppt 선형모터Manje YeaNo ratings yet
- E-con 외부IO설명서 (dke)Document84 pagesE-con 외부IO설명서 (dke)Nguyen Van KhanhNo ratings yet
- 10 AnsysDocument5 pages10 AnsysGweParkNo ratings yet
- Multi-Body Dynamic ModelinDocument6 pagesMulti-Body Dynamic Modelinsangwoo jungNo ratings yet
- Static Friction Compensation For Enhancing Motor Control PrecisionDocument6 pagesStatic Friction Compensation For Enhancing Motor Control Precision양완철No ratings yet
- (데이터챌린지 2023) 금융데이터거래소 분석환경 이용자 매뉴얼Document20 pages(데이터챌린지 2023) 금융데이터거래소 분석환경 이용자 매뉴얼coconache123No ratings yet
- ASTM D6425 Measuring Friction and Wear Properties of Extreme Pressure - EP Lubricating Oils Using SRV Test Machine 한글Document10 pagesASTM D6425 Measuring Friction and Wear Properties of Extreme Pressure - EP Lubricating Oils Using SRV Test Machine 한글김인식No ratings yet