You might also like
- STAGES IN DESIGNING AND OPTIMIZING MECHATRONIC SYSTEMSDocument12 pagesSTAGES IN DESIGNING AND OPTIMIZING MECHATRONIC SYSTEMSVibin JacobNo ratings yet
- 1.1 Objective:: MBICTDocument47 pages1.1 Objective:: MBICTsagarparikh31yahoo_cNo ratings yet
- ECU and Engine Management System GuideDocument10 pagesECU and Engine Management System GuideRailyn Tagwalan Timol100% (1)
- Adaptive Braking System Using LabviewDocument10 pagesAdaptive Braking System Using Labviewsurajgurnani24No ratings yet
- Introduction To Hydraulics, Servo Drive and PLCDocument5 pagesIntroduction To Hydraulics, Servo Drive and PLCHeather Reyes100% (1)
- Mechatronics Systems PDFDocument23 pagesMechatronics Systems PDFRamanathan DuraiNo ratings yet
- Transmisión Inputs - CAT TH460Document10 pagesTransmisión Inputs - CAT TH460Daniel Aguirre100% (1)
- Servomechanism Presentation MCS 1Document38 pagesServomechanism Presentation MCS 1Vipin Ramachandran PillaiNo ratings yet
- Embedded System AssignmentDocument14 pagesEmbedded System AssignmentUmer KhanNo ratings yet
- Driver Motor BrushlesDocument48 pagesDriver Motor BrushlesGONAJ2008No ratings yet
- Señales de Entrada ECUDocument34 pagesSeñales de Entrada ECUlibertyplusNo ratings yet
- Implement Electronic Control System 966Document4 pagesImplement Electronic Control System 966Ahmed RezkNo ratings yet
- AE U-3 HalfDocument9 pagesAE U-3 HalfPurna SapkotaNo ratings yet
- OBD-InsightsDocument52 pagesOBD-Insightsjayasundar100% (1)
- 6 Engine Computer Systems2Document36 pages6 Engine Computer Systems2Khairulz AnuarNo ratings yet
- Exp3 PLC 2020Document6 pagesExp3 PLC 2020Shahidan KirkukyNo ratings yet
- 120H Motor Grader documentation on electrical componentsDocument6 pages120H Motor Grader documentation on electrical componentsMiguel Angel Garrido CardenasNo ratings yet
- General Engine Instrumentation-SumDocument13 pagesGeneral Engine Instrumentation-SumDaniel MkandawireNo ratings yet
- 4.2.1-4.2.4 Minyi EffaDocument17 pages4.2.1-4.2.4 Minyi EffaRusonegroNo ratings yet
- Fuzzy Based Wireless Speed LimiterDocument4 pagesFuzzy Based Wireless Speed LimiterAnbalagan MurugesanNo ratings yet
- Fuel System: Shutdown SIS Previous ScreenDocument9 pagesFuel System: Shutdown SIS Previous Screenjames foxNo ratings yet
- Automotive Electronics System: GaugesDocument8 pagesAutomotive Electronics System: Gaugeshadush gebreNo ratings yet
- Fuel System: Systems OperationDocument11 pagesFuel System: Systems OperationNy Romero100% (2)
- Chapter I Auto RegDocument25 pagesChapter I Auto RegLokman DridahNo ratings yet
- Brushed DC Sensorless FeedbackDocument3 pagesBrushed DC Sensorless FeedbackHoon Miew JieNo ratings yet
- Novel Method PMDC Motor Speed ControlDocument15 pagesNovel Method PMDC Motor Speed ControlTravis WoodNo ratings yet
- 966 Fuel SystemDocument12 pages966 Fuel SystemWalid HouranNo ratings yet
- Assignment 01 MSD 17mte23Document4 pagesAssignment 01 MSD 17mte23Shahrukh Aleem JhatialNo ratings yet
- Project Report Nano ElectronicsDocument37 pagesProject Report Nano Electronics22L149 - SUBASH KARTHICK VNo ratings yet
- Check ListDocument155 pagesCheck Listahmad sulaimanNo ratings yet
- Componentes Eléctricos de Entrada Al ECM ImplementoDocument17 pagesComponentes Eléctricos de Entrada Al ECM ImplementoLuis EaNo ratings yet
- Electro Pneumatics Technical ReferenceDocument110 pagesElectro Pneumatics Technical ReferenceKhanNo ratings yet
- Lecture 6 Diesel EngineDocument18 pagesLecture 6 Diesel EngineHAMIDNo ratings yet
- Fueling System of SI and CI Engines: by Zewdie Alemayehu (Automotive Eng.)Document67 pagesFueling System of SI and CI Engines: by Zewdie Alemayehu (Automotive Eng.)ahmed jemalNo ratings yet
- Caterpillar 311b 330b Excavators Engine and Pump Electronic Control SystemDocument10 pagesCaterpillar 311b 330b Excavators Engine and Pump Electronic Control Systemjohn100% (47)
- CH 3 - 1674008554Document17 pagesCH 3 - 1674008554Nan OoNo ratings yet
- Fuel System PDFDocument11 pagesFuel System PDFDongTaNo ratings yet
- Mechatronics Module 4: Sensors and ActuatorsDocument23 pagesMechatronics Module 4: Sensors and ActuatorsCharles AbrahamNo ratings yet
- ECU Designing and Testing Using National Instruments ProductsDocument7 pagesECU Designing and Testing Using National Instruments ProductsTYu4443No ratings yet
- Honors in “Electric Vehicles” Bachelor of Engineering Modeling and Simulation of EHV (402034MJ) Unit 3: Control UnitsDocument64 pagesHonors in “Electric Vehicles” Bachelor of Engineering Modeling and Simulation of EHV (402034MJ) Unit 3: Control Unitssagar kordeNo ratings yet
- Tier3 ElectricDocument10 pagesTier3 ElectricLuong Nguyen Danh100% (1)
- Me2401 Mechatronics - 2 Marks With AnswerDocument29 pagesMe2401 Mechatronics - 2 Marks With AnswerAravind Selva50% (2)
- Ass 1 AnswerDocument8 pagesAss 1 AnswerChala BalchaNo ratings yet
- Electronic Suspension Systems: Automotive Technology, Fifth EditionDocument50 pagesElectronic Suspension Systems: Automotive Technology, Fifth Editionali awadNo ratings yet
- Engine Vehicle Management SystemsDocument92 pagesEngine Vehicle Management Systemsprabahar jeevanandamNo ratings yet
- Servo Motor Interfacing With 8051 Using Keil CompilerDocument11 pagesServo Motor Interfacing With 8051 Using Keil Compilertazeb100% (1)
- Final Year ProjectDocument4 pagesFinal Year ProjectZain RiazNo ratings yet
- Design of Automatic Speed Control System in 4 - Wheelers For Avoiding AccidentsDocument4 pagesDesign of Automatic Speed Control System in 4 - Wheelers For Avoiding AccidentsChandra SekarNo ratings yet
- सचू ना 2012 में EMDEC प्रणाली पर सूचनाDocument140 pagesसचू ना 2012 में EMDEC प्रणाली पर सूचनाHanuma Reddy100% (1)
- Chapter1 121210210811 Phpapp02Document57 pagesChapter1 121210210811 Phpapp02sharkeraNo ratings yet
- PM STEPPER MOTOR CONTROL SYSTEMDocument28 pagesPM STEPPER MOTOR CONTROL SYSTEMNirmal KumarNo ratings yet
- An Electric Braking System Controller For Brushless DC Motor in Electric Vehicle ApplicationDocument9 pagesAn Electric Braking System Controller For Brushless DC Motor in Electric Vehicle ApplicationEzequiel AriasNo ratings yet
- IRMCS3041 System Overview & Guide - RD - Irmcs3041Document14 pagesIRMCS3041 System Overview & Guide - RD - Irmcs3041shivguptaNo ratings yet
- Smart Traffic Control System Using PLC ScadaDocument14 pagesSmart Traffic Control System Using PLC ScadaSaravanan ViswakarmaNo ratings yet
- Microcontroller Controlled BLDC Drive for Electric VehiclesDocument4 pagesMicrocontroller Controlled BLDC Drive for Electric VehiclesAvinash Babu KmNo ratings yet
- Study of Automatic Transmission Based On Electronic Control SystemDocument10 pagesStudy of Automatic Transmission Based On Electronic Control SystemHusseenNo ratings yet
- Chrysler Dakota Part11Document24 pagesChrysler Dakota Part11Sašo Brunšek-BrunoNo ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Orthographic Projections Presentation by Prof V K GoelDocument14 pagesOrthographic Projections Presentation by Prof V K GoelRaunak GuptaNo ratings yet
- Unit 5 (C)Document76 pagesUnit 5 (C)Raunak GuptaNo ratings yet
- Unit 5 (D)Document8 pagesUnit 5 (D)Raunak GuptaNo ratings yet
- Mechatronics in Manufacturing: An SEO-Optimized OverviewDocument14 pagesMechatronics in Manufacturing: An SEO-Optimized OverviewRaunak GuptaNo ratings yet
- Projection of Lines and SolidsDocument21 pagesProjection of Lines and SolidsRaunak GuptaNo ratings yet
- Isometric Projections: Faculty Development ProgrammeDocument42 pagesIsometric Projections: Faculty Development ProgrammeRaunak GuptaNo ratings yet
- Process CapabilityDocument14 pagesProcess CapabilityRaunak GuptaNo ratings yet
- Workshop On Blue Print Reading (Development Class)Document28 pagesWorkshop On Blue Print Reading (Development Class)Raunak GuptaNo ratings yet
- Principles of Dimensioning and SectioningDocument15 pagesPrinciples of Dimensioning and SectioningRaunak GuptaNo ratings yet
- General Instructions (S)Document8 pagesGeneral Instructions (S)Raunak GuptaNo ratings yet
- Seminar On D.O.EDocument33 pagesSeminar On D.O.ERaunak Gupta100% (1)
- Six Sigma - Expert LectureDocument76 pagesSix Sigma - Expert LectureRaunak GuptaNo ratings yet
- Right Approach To QualityDocument9 pagesRight Approach To QualityRaunak GuptaNo ratings yet
- Robotics and Vision System - TMTE 503 (Unit 1)Document14 pagesRobotics and Vision System - TMTE 503 (Unit 1)Raunak GuptaNo ratings yet
- Samrat Ashok Technological Institute, VidishaDocument24 pagesSamrat Ashok Technological Institute, VidishaRaunak GuptaNo ratings yet
- Computer Aided Process Planning - CIM 1123Document53 pagesComputer Aided Process Planning - CIM 1123Raunak GuptaNo ratings yet
- Advanced Manufacturing Technology - CIM 1112 PDFDocument32 pagesAdvanced Manufacturing Technology - CIM 1112 PDFRaunak GuptaNo ratings yet
- Mis - Erp - Cim 1125Document75 pagesMis - Erp - Cim 1125Raunak GuptaNo ratings yet
- Reliability and TPM - CIM 1124Document7 pagesReliability and TPM - CIM 1124Raunak GuptaNo ratings yet
- Mechatronics - CIM 1114Document59 pagesMechatronics - CIM 1114Raunak GuptaNo ratings yet
- Total Quality Management - CIM 1115Document28 pagesTotal Quality Management - CIM 1115Raunak GuptaNo ratings yet
- Computer Aided Design - CIM 1111 PDFDocument36 pagesComputer Aided Design - CIM 1111 PDFRaunak GuptaNo ratings yet
- Modeling Biologics, Antibodies & ProteinsDocument2 pagesModeling Biologics, Antibodies & Proteinsthamizh555No ratings yet
- Sld500 AnglDocument2 pagesSld500 AnglThinkDefenceNo ratings yet
- Runge Kutta AlgorithmDocument3 pagesRunge Kutta AlgorithmRodrigo AbdoNo ratings yet
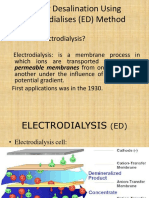
- Water Desalination Using Electrodialysis (EDDocument18 pagesWater Desalination Using Electrodialysis (EDibrahimawad06No ratings yet
- Belapur HousingDocument17 pagesBelapur HousingSandhya Mahendren0% (1)
- Eclipse Winnox Burners: Model WX0100Document4 pagesEclipse Winnox Burners: Model WX0100yulianoNo ratings yet
- 10.03.2020-CeramicMicrospheres 410 TechPaper 9842346 PDFDocument4 pages10.03.2020-CeramicMicrospheres 410 TechPaper 9842346 PDFhomeros76No ratings yet
- Components of A LAN NetworkDocument8 pagesComponents of A LAN Networkranadip dasNo ratings yet
- Science exam questionsDocument7 pagesScience exam questionsLorraine Calvez Donio100% (1)
- Roofing Styles in Traditional Nigerian SocietyDocument15 pagesRoofing Styles in Traditional Nigerian SocietyOluwaseyi AdegokeNo ratings yet
- 3 Flexural Analysis/Design of Beam 3 Flexural Analysis/Design of Beam 3. Flexural Analysis/Design of Beam 3. Flexural Analysis/Design of BeamDocument146 pages3 Flexural Analysis/Design of Beam 3 Flexural Analysis/Design of Beam 3. Flexural Analysis/Design of Beam 3. Flexural Analysis/Design of BeamJm CampitanNo ratings yet
- Basics of Seismic InterpretationDocument21 pagesBasics of Seismic InterpretationMahmoud Said100% (5)
- En Iso 13919-1 - 1996Document9 pagesEn Iso 13919-1 - 1996MNo ratings yet
- TCAA-AC-OPS003A Draft Operator Quality SystemDocument29 pagesTCAA-AC-OPS003A Draft Operator Quality SystemElmer VillegasNo ratings yet
- Aircraft Electrical Wiring Interconnect System (EWIS) Best PracticesDocument176 pagesAircraft Electrical Wiring Interconnect System (EWIS) Best Practicesnayapepe100% (5)
- (CHEVROLET) Manual de Taller Chevrolet Sail 2010Document120 pages(CHEVROLET) Manual de Taller Chevrolet Sail 2010Nader Jimenez79% (14)
- WSDOT McDowell Final WirelessCommDocument83 pagesWSDOT McDowell Final WirelessCommoldjanusNo ratings yet
- Polyken 930 TapeDocument2 pagesPolyken 930 TapeKyaw Kyaw AungNo ratings yet
- SAP SD Route Determination: Factors and ConfigurationDocument6 pagesSAP SD Route Determination: Factors and ConfigurationLokesh DoraNo ratings yet
- SteelDocument5 pagesSteelSarah PerezNo ratings yet
- Design of Slotted Waveguide Antenna for Radar at X-BandDocument3 pagesDesign of Slotted Waveguide Antenna for Radar at X-BandSyed Nazim shahNo ratings yet
- 1600 Bro enDocument2 pages1600 Bro enJenderalKancilNo ratings yet
- ACE Pilot User GuideDocument109 pagesACE Pilot User GuideEnrique Tejada FarfanNo ratings yet
- TDS Turbonycoil TN600 1E19Document2 pagesTDS Turbonycoil TN600 1E19Emad The EnthusiastNo ratings yet
- OilsistemDocument212 pagesOilsistemapi-2635664650% (2)
- PTE 526 Natural Gas Engineering: BY Engr. J. O. OwolabiDocument124 pagesPTE 526 Natural Gas Engineering: BY Engr. J. O. Owolabiokeke ekeneNo ratings yet
- ENGSCI 442 Petroleum Engineering LecturesDocument77 pagesENGSCI 442 Petroleum Engineering LecturessereptNo ratings yet
- Thika Water and Sewerage Company Limited Tender Notice PDFDocument1 pageThika Water and Sewerage Company Limited Tender Notice PDFUsman ArifNo ratings yet
- Industrial Training ReportDocument19 pagesIndustrial Training ReportRam PandeyNo ratings yet
- AHU DetailsDocument2 pagesAHU DetailsamitbslpawarNo ratings yet