You might also like
- Chp6 DC Motor Drives (Uncontrolled and Controlled Rectifier) - FinalDocument49 pagesChp6 DC Motor Drives (Uncontrolled and Controlled Rectifier) - Finalblaze emberNo ratings yet
- Industrial Maintenance Mechanics 1Document7 pagesIndustrial Maintenance Mechanics 1Kiran DuggarajuNo ratings yet
- Chapter 1 Det50063 - IntroductionDocument12 pagesChapter 1 Det50063 - IntroductionFara FaraNo ratings yet
- Lecture Notes-Electrical Machine-II (BEE 1401) Part-I: Veer Surendra Sai University of Technology, BurlaDocument79 pagesLecture Notes-Electrical Machine-II (BEE 1401) Part-I: Veer Surendra Sai University of Technology, BurlaDeependra SinghNo ratings yet
- Chapter 1 Det50063 - IntroductionDocument12 pagesChapter 1 Det50063 - IntroductionFara FaraNo ratings yet
- UNIT 5 - Special MachinesDocument33 pagesUNIT 5 - Special MachinesKapilachander ThangavelNo ratings yet
- Chapter 2 Det50063 - Speed Control of DC MotorDocument54 pagesChapter 2 Det50063 - Speed Control of DC MotorFara Fara100% (1)
- DC Motor Drives: Speed Control and Transient AnalysisDocument38 pagesDC Motor Drives: Speed Control and Transient Analysisblaze emberNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Comparison Between VSI and CSI Fed Induction Motor Drives in MATLAB Environment Based On THD PerformanceDocument71 pagesComparison Between VSI and CSI Fed Induction Motor Drives in MATLAB Environment Based On THD Performancethegopal100% (2)
- Variable Reluctance Motor BasicsDocument6 pagesVariable Reluctance Motor BasicsRevant SharmaNo ratings yet
- Lighting Design LectureDocument5 pagesLighting Design LecturehebahapyNo ratings yet
- DC Motor S: Anand 08338958770Document79 pagesDC Motor S: Anand 08338958770Rohit AvasthiNo ratings yet
- MPD 600 Article On Site Test HV Cable Systems OMICRON Magazine 2011 ENUDocument6 pagesMPD 600 Article On Site Test HV Cable Systems OMICRON Magazine 2011 ENUjoseNo ratings yet
- Advanced Power BJT Base Driving CircuitsDocument16 pagesAdvanced Power BJT Base Driving CircuitsSachin SivaNo ratings yet
- DC Motor Speed Control MethodsDocument53 pagesDC Motor Speed Control MethodsKuhaanProNo ratings yet
- Advantages, Disadvantages and Applications of Electric DrivesDocument11 pagesAdvantages, Disadvantages and Applications of Electric DrivesSuprakash Maity100% (1)
- Closed Loop Speed Control of DC Motor DrivesDocument4 pagesClosed Loop Speed Control of DC Motor DrivesypobuleshNo ratings yet
- Unit - V: Single Phase Induction Motors and Special MachinesDocument49 pagesUnit - V: Single Phase Induction Motors and Special MachinessasikalasivakumarNo ratings yet
- Speeed ControlDocument3 pagesSpeeed ControlChristine GomezNo ratings yet
- Unit Iii - 04.09.2021Document94 pagesUnit Iii - 04.09.2021G.L. Jai Purushotham RajNo ratings yet
- EE2403 Special Electrical MachinesDocument19 pagesEE2403 Special Electrical MachinesvasanthavananNo ratings yet
- Solid State Drives Short BookDocument48 pagesSolid State Drives Short BookGomathi Raja MNo ratings yet
- 45 24985 EE328 2016 1 2 1 Lecture7Document11 pages45 24985 EE328 2016 1 2 1 Lecture7Shimaa ashrafNo ratings yet
- Electrical Braking of DC MotorDocument5 pagesElectrical Braking of DC MotorBhavani MurugesanNo ratings yet
- Design Optimization and Performance Evaluation of Grid Connected Solar Photovoltaic SystemsDocument72 pagesDesign Optimization and Performance Evaluation of Grid Connected Solar Photovoltaic Systemsبلال شبیرNo ratings yet
- Power Semiconductor DrivesDocument4 pagesPower Semiconductor DrivesKah KiatNo ratings yet
- Ee 591 Machine 2 PDFDocument39 pagesEe 591 Machine 2 PDFPrabhat Kumar SahuNo ratings yet
- DC Motor Drives: Multi-Quadrant OperationDocument26 pagesDC Motor Drives: Multi-Quadrant OperationSudhir P BhatNo ratings yet
- DC M&T - Lecture - Notes PDFDocument138 pagesDC M&T - Lecture - Notes PDFTridasha AithalNo ratings yet
- Chapter 5 - Synchronous Generator: The Effect of Load Changes On A Synchronous Generator Operating AloneDocument46 pagesChapter 5 - Synchronous Generator: The Effect of Load Changes On A Synchronous Generator Operating AloneMuhammad R ShihadehNo ratings yet
- Poly Phase Induction Motors in Power PlantsDocument58 pagesPoly Phase Induction Motors in Power PlantsDipikaNo ratings yet
- Electrical Machines - II Two Marks Questions With Answers 2014 - Vidyarthiplus (V+) Blog - A Blog For Students PDFDocument41 pagesElectrical Machines - II Two Marks Questions With Answers 2014 - Vidyarthiplus (V+) Blog - A Blog For Students PDFVelappagari SekharNo ratings yet
- New Approach For Modelling Doubly-Fed Induction Generator (DFIG) For Grid-Connection StudiesDocument13 pagesNew Approach For Modelling Doubly-Fed Induction Generator (DFIG) For Grid-Connection StudiesKhalid HarounNo ratings yet
- Slip Power Recovery-Induction MotorDocument24 pagesSlip Power Recovery-Induction MotorSulthaniya BeeviNo ratings yet
- ECE 8830 - Electric Drives: Topic 9: Current-Fed InvertersDocument60 pagesECE 8830 - Electric Drives: Topic 9: Current-Fed InvertersKelvin LiewNo ratings yet
- Electric Machinery: Powerpoint SlidesDocument49 pagesElectric Machinery: Powerpoint SlidesKesalan TerasaNo ratings yet
- Induction MachineDocument27 pagesInduction MachineJuan Adrián Pérez OrozcoNo ratings yet
- 17ee82 - Ida - Mod 4 NotesDocument18 pages17ee82 - Ida - Mod 4 NotesManish Kumar SahaniNo ratings yet
- CHAPTER 7 - Ignition SystemsDocument38 pagesCHAPTER 7 - Ignition SystemsRahman SelamatNo ratings yet
- Maintenance Management of Electrical Equipment Condition Monitoring Based Part 1Document5 pagesMaintenance Management of Electrical Equipment Condition Monitoring Based Part 1Abdan ShidqiNo ratings yet
- INSTALLATION AND MAINTENANCE OF INDUSTRIAL INDUCTION MOTORS AND CONTROL SYSTEMSDocument59 pagesINSTALLATION AND MAINTENANCE OF INDUSTRIAL INDUCTION MOTORS AND CONTROL SYSTEMSMichael HailuNo ratings yet
- Exp - Machine Design LabDocument1 pageExp - Machine Design LabDineshKanawatNo ratings yet
- 3 Phase-Controlled DC Motor DrivesDocument45 pages3 Phase-Controlled DC Motor DrivesgilmartNo ratings yet
- Induction Motor Braking Regenerative Dynamic Braking of Induction Motor - Electrical4u PDFDocument7 pagesInduction Motor Braking Regenerative Dynamic Braking of Induction Motor - Electrical4u PDFbalajiNo ratings yet
- Induction MoterDocument20 pagesInduction MoterShafiuddin HabeebNo ratings yet
- Induction GeneratorDocument12 pagesInduction GeneratorSumaira SaifNo ratings yet
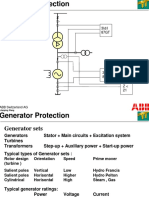
- Generator Protection Guide for Faults and Abnormal ConditionsDocument86 pagesGenerator Protection Guide for Faults and Abnormal ConditionsAbhishek RajputNo ratings yet
- Ida 10ee74Document7 pagesIda 10ee74pkumarmysNo ratings yet
- Motor WindingsDocument33 pagesMotor Windingsaaasd100% (1)
- Electrical Earthing Systems ExplainedDocument102 pagesElectrical Earthing Systems ExplainedMohammed AL-Hejeri100% (1)
- DC DC Converters (Lecture#03)Document40 pagesDC DC Converters (Lecture#03)usmangul_23No ratings yet
- AC Machine 1Document27 pagesAC Machine 1Fadhil A. Hasan100% (1)
- Speed Control IM (Edited)Document37 pagesSpeed Control IM (Edited)مصطفى حمدىNo ratings yet
- EEU453 Industrial DrivesDocument1 pageEEU453 Industrial DrivesSatish NurukurthiNo ratings yet
- A-Iii/1,2 A-Iii/6 B-Iii/2Document55 pagesA-Iii/1,2 A-Iii/6 B-Iii/2Ene ClaudiuNo ratings yet
- Dcmotors and Their RepresentationDocument61 pagesDcmotors and Their RepresentationSoeprapto AtmariNo ratings yet
- NR 410202 Power Semiconductor DrivesDocument8 pagesNR 410202 Power Semiconductor DrivesSrinivasa Rao GNo ratings yet
- Universal Motors: Presented by Meraj WarsiDocument13 pagesUniversal Motors: Presented by Meraj WarsiMeraj WarsiNo ratings yet
- A.C. Series MotorDocument16 pagesA.C. Series MotorM BNo ratings yet
- Regenerative Braking of DC Shunt MotorsDocument29 pagesRegenerative Braking of DC Shunt MotorsDeya Awaysah100% (1)
- Chapter 5 DET50063 - BRAKING OF AC MOTORDocument10 pagesChapter 5 DET50063 - BRAKING OF AC MOTORFara FaraNo ratings yet
- AC Motor Speed Control TechniquesDocument19 pagesAC Motor Speed Control TechniquesFara FaraNo ratings yet
- Det50063 PW1 Static Converter 1 QuadrantDocument7 pagesDet50063 PW1 Static Converter 1 QuadrantFara FaraNo ratings yet
- Transformer Protection - SIEMENSDocument53 pagesTransformer Protection - SIEMENShozipek5599No ratings yet
- Project DefinitionsDocument29 pagesProject Definitionsabhiram403No ratings yet
- Data Logger with GPRS + SMS MonitoringDocument2 pagesData Logger with GPRS + SMS Monitoringashry09100% (1)
- Repair & Retrofit - New Life For Aged TransformersDocument6 pagesRepair & Retrofit - New Life For Aged Transformerswinston11No ratings yet
- UputstvoDocument5 pagesUputstvoDragan PamučarNo ratings yet
- Zenitel - VMP-430 - 1020603700 PDFDocument2 pagesZenitel - VMP-430 - 1020603700 PDFGlen Rix AlteradoNo ratings yet
- Diode Equation ModelsDocument24 pagesDiode Equation ModelsJayann GonzalesNo ratings yet
- Electrical Engineering Guide to Antenna CharacteristicsDocument38 pagesElectrical Engineering Guide to Antenna CharacteristicsdvdiyenNo ratings yet
- Agc From EtapDocument8 pagesAgc From EtapKiran KarthikNo ratings yet
- CS8603 Distributed System Model QuestionDocument2 pagesCS8603 Distributed System Model QuestionPrasanna50% (2)
- Manual de Instalación Accuload IIIDocument94 pagesManual de Instalación Accuload IIIMisael Castillo CamachoNo ratings yet
- Real Case: Lithium Ion NMC-2170 Battery CellDocument15 pagesReal Case: Lithium Ion NMC-2170 Battery CellValic GuiterezNo ratings yet
- Centric 50 KvaDocument85 pagesCentric 50 KvaAntónio BarrosNo ratings yet
- 501-11 Glass, Window Frames and Mechanisms PICKUP JMCDocument15 pages501-11 Glass, Window Frames and Mechanisms PICKUP JMCRusonegroNo ratings yet
- CH 4Document26 pagesCH 4Keneni AlemayehuNo ratings yet
- 2098086-001C 2nd Ed E-PiCCO SMDocument40 pages2098086-001C 2nd Ed E-PiCCO SMjhon aguileraNo ratings yet
- SMART GLASS DATA SHEET v2Document3 pagesSMART GLASS DATA SHEET v2ayham.kuwait.2018No ratings yet
- Osmc3 22sch CleanDocument1 pageOsmc3 22sch Cleanjackson miguelNo ratings yet
- IntroductionDocument10 pagesIntroductionsanthoshNo ratings yet
- Transmission Characteristics and Losses in Optical FiberDocument28 pagesTransmission Characteristics and Losses in Optical FiberSudarshanNo ratings yet
- EE 340 Control Systems SyllabusDocument3 pagesEE 340 Control Systems Syllabusanon_897005027No ratings yet
- Fusibles Ferraz ShawmutDocument548 pagesFusibles Ferraz ShawmutLeonardo CamargoNo ratings yet
- Questions & Answers On Commutation Process & Excitation MethodsDocument23 pagesQuestions & Answers On Commutation Process & Excitation Methodskibrom atsbhaNo ratings yet
- ATP500 Diesel Genset Made in UK with Perkins EngineDocument3 pagesATP500 Diesel Genset Made in UK with Perkins Enginesaif loayNo ratings yet
- Lect 1 - Intro To Automatic Control PDFDocument15 pagesLect 1 - Intro To Automatic Control PDFYota KimireNo ratings yet
- Fault Current Limiters Report On The Activities of CIGRE WG A3.10Document9 pagesFault Current Limiters Report On The Activities of CIGRE WG A3.10Sameer MalikNo ratings yet
- Canadian Solar CS6K-280P Module Generates Over 280W of PowerDocument2 pagesCanadian Solar CS6K-280P Module Generates Over 280W of PowerAdrian DumitracheNo ratings yet
- DC To DC Pscad ModelDocument6 pagesDC To DC Pscad Modeladyasha acharyaNo ratings yet
- IR Sensor Circuit for Line FollowingDocument2 pagesIR Sensor Circuit for Line Followingvivek dongareNo ratings yet