You might also like
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesFrom EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesRating: 1.5 out of 5 stars1.5/5 (2)
- ingénieur-5-20-34Document15 pagesingénieur-5-20-34ziadadjili7No ratings yet
- Linearna AlgebraDocument3 pagesLinearna AlgebraMarko JedlickaNo ratings yet
- Tutorial 2 2023Document10 pagesTutorial 2 2023HashemNo ratings yet
- 0.1 Calculo de La Inversa:: Metodo de Gauss - JordanDocument20 pages0.1 Calculo de La Inversa:: Metodo de Gauss - JordanCesar ToroNo ratings yet
- Homework 5 RoboticsDocument3 pagesHomework 5 RoboticsBrunoNo ratings yet
- 1 Problem 2.2.10: 1 n 0 j j j−1 βDocument6 pages1 Problem 2.2.10: 1 n 0 j j j−1 βHasanNo ratings yet
- Homework6 Sol SebastianDocument8 pagesHomework6 Sol SebastianMd Nur-A-Adam DonyNo ratings yet
- CS 294-73 Software Engineering For Scientific ComputingDocument31 pagesCS 294-73 Software Engineering For Scientific ComputingEdmund ZinNo ratings yet
- Matrix Math TutorialDocument6 pagesMatrix Math TutorialToby ChengNo ratings yet
- 13.1.1 Observability and Controllability Tests For LTIDocument9 pages13.1.1 Observability and Controllability Tests For LTIBabiiMuffinkNo ratings yet
- Automatic Control II Control System Design in State SpaceDocument33 pagesAutomatic Control II Control System Design in State Spaceعبدالحميد أبوشينةNo ratings yet
- National University of Singapore Drill Problem Set 1Document3 pagesNational University of Singapore Drill Problem Set 1Gyan KirtiNo ratings yet
- MATRIX ALGEBRADocument21 pagesMATRIX ALGEBRA洪梓沛No ratings yet
- Lecture 7Document4 pagesLecture 7Maram AbdullahNo ratings yet
- 1 Minimal Realizations: Co o C C o 1 2 Co 3 C o 1 Co C oDocument6 pages1 Minimal Realizations: Co o C C o 1 2 Co 3 C o 1 Co C oMouliNo ratings yet
- Flywheels QuestionsDocument3 pagesFlywheels Questionsraghu.entrepreneurNo ratings yet
- Tutorial 6 LDSDocument3 pagesTutorial 6 LDSshivendra.singh.vermaNo ratings yet
- ch02 NTUST Mathematics For ManagementDocument68 pagesch02 NTUST Mathematics For Management李雅靜No ratings yet
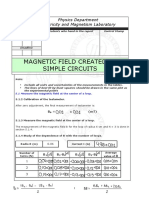
- Magnetic Field Created by Simple Circuits: Physics Department Electricity and Magnetism LaboratoryDocument11 pagesMagnetic Field Created by Simple Circuits: Physics Department Electricity and Magnetism LaboratoryAlvaro VillaltaNo ratings yet
- State Feed ControlDocument12 pagesState Feed ControlPYNo ratings yet
- BioMEMS Sheet2 ADocument7 pagesBioMEMS Sheet2 Atracywst0123No ratings yet
- Ejemplo Método de JacobiDocument3 pagesEjemplo Método de JacobiDaniela EstefaniaNo ratings yet
- Linear Algebra Final Exam: 1:00-3:00, Sunday, June 2 Bradley 102Document6 pagesLinear Algebra Final Exam: 1:00-3:00, Sunday, June 2 Bradley 102Abdullah FarooqueNo ratings yet
- State Feedback Control DesignDocument7 pagesState Feedback Control DesignVenkata SainadhNo ratings yet
- hw3solutionsDocument4 pageshw3solutionsrangarajulokesh77No ratings yet
- Math 121A: Homework 4 Solutions: N N N RDocument6 pagesMath 121A: Homework 4 Solutions: N N N RcfisicasterNo ratings yet
- Math TurkDocument7 pagesMath TurkMəhəmməd BayramovNo ratings yet
- I Some TriesDocument6 pagesI Some TriesFree freeNo ratings yet
- Lecture3 Data CompressionDocument27 pagesLecture3 Data CompressionAbdo ANNo ratings yet
- Linear Algebra FundamentalsDocument94 pagesLinear Algebra Fundamentalspattrapong pongpattraNo ratings yet
- Rosin and Pitteway - The Ellipse and The Five-Centred ArchDocument10 pagesRosin and Pitteway - The Ellipse and The Five-Centred Archfmboy700No ratings yet
- Mhtcet Maths Hints and SolutionsDocument649 pagesMhtcet Maths Hints and SolutionsRupali Pattewar100% (1)
- Controlability & StabilityDocument6 pagesControlability & StabilityRehman SaleemNo ratings yet
- Some Basics of Matrix Calculation: Ij N, K I, J 1Document3 pagesSome Basics of Matrix Calculation: Ij N, K I, J 1b00kb00kNo ratings yet
- Chapter 5 ReviewDocument6 pagesChapter 5 ReviewUp ToyouNo ratings yet
- Problems 3dtransformationsDocument4 pagesProblems 3dtransformationsjiales225No ratings yet
- Matrix Algebra: A A A A A ADocument83 pagesMatrix Algebra: A A A A A AElliott Martyn ChickNo ratings yet
- Tutorial - Sheet1 - DC - Networks - Transient AnswersDocument3 pagesTutorial - Sheet1 - DC - Networks - Transient AnswersShroyonNo ratings yet
- G13 2021 IZOM Day2 SolutionDocument6 pagesG13 2021 IZOM Day2 SolutionmokonoaniNo ratings yet
- jordonsecA 123456Document5 pagesjordonsecA 123456ipm04prithivitNo ratings yet
- Homework 2 Solutions - ECE6550, Fall 2011: N n1 n1 1 0 0 1 n1 n1 n2 1 1Document2 pagesHomework 2 Solutions - ECE6550, Fall 2011: N n1 n1 1 0 0 1 n1 n1 n2 1 1nida haqNo ratings yet
- Ejercicios de Métodos de Reconstrución de Imágenes de TC: Hoja 3 - Método ARTDocument3 pagesEjercicios de Métodos de Reconstrución de Imágenes de TC: Hoja 3 - Método ARTantonioNo ratings yet
- 1 Output Controllability: MAE 280A 1 Maur Icio de OliveiraDocument10 pages1 Output Controllability: MAE 280A 1 Maur Icio de OliveiraMouliNo ratings yet
- Homework 1 Solutions: 2 3 4 K 2 3 K 2 3 K k+1 k+1 k+1 2 3 4 K 2 3 4 K K MDocument9 pagesHomework 1 Solutions: 2 3 4 K 2 3 K 2 3 K k+1 k+1 k+1 2 3 4 K 2 3 4 K K Mhomanho2021No ratings yet
- 1008uf Eeec-DigitalDocument9 pages1008uf Eeec-DigitalAshutosh JaiswalNo ratings yet
- Sec. 4.6 Tables of Fourier Properties and of Basic Fourier Transform PairsDocument1 pageSec. 4.6 Tables of Fourier Properties and of Basic Fourier Transform PairsPABLO PardoNo ratings yet
- DampingDocument7 pagesDampingTrangNo ratings yet
- Mathcad MeytaDocument9 pagesMathcad MeytameytaNo ratings yet
- Class 12 Sci Pre Board 1 SolutionDocument10 pagesClass 12 Sci Pre Board 1 Solutionashish10122006No ratings yet
- Complex Stresses PDF Jul 2021Document17 pagesComplex Stresses PDF Jul 2021David KegayaNo ratings yet
- Chap. 6: Linear Algebra Matrices, Vectors, Determinants, Linear Systems of EquationsDocument31 pagesChap. 6: Linear Algebra Matrices, Vectors, Determinants, Linear Systems of EquationsBHUSHAM CHANDRASEKHARNo ratings yet
- Homework 1Document5 pagesHomework 1Stefanos van DijkNo ratings yet
- Problem (S) :: NoninvertingDocument4 pagesProblem (S) :: NoninvertingAdi faisalNo ratings yet
- Math 415. Final Exam. May 6, 2019Document34 pagesMath 415. Final Exam. May 6, 2019Aidi .WafiNo ratings yet
- Current Electricity03 - Subjective SolvedDocument9 pagesCurrent Electricity03 - Subjective SolvedRaju SinghNo ratings yet
- IMO 2019 NotesDocument13 pagesIMO 2019 NotesAndrei346No ratings yet
- Hexapod KinematicsDocument5 pagesHexapod KinematicsYahyaNo ratings yet
- Series de PuseuixDocument13 pagesSeries de PuseuixGabrielBenícioNo ratings yet
- Geometry Theory Consolidated For MBA PrepDocument12 pagesGeometry Theory Consolidated For MBA Prepa_j_sanyalNo ratings yet
- APPhg XF PT TMH 0 A 9 X7 QenDocument33 pagesAPPhg XF PT TMH 0 A 9 X7 QenShreya Guhe100% (1)
- G6 DLP - Math - CotDocument5 pagesG6 DLP - Math - Cotnormy batalonaNo ratings yet
- Beta DistributionDocument8 pagesBeta DistributionnimeshNo ratings yet
- Fibonacci Classroom Worksheet SolutionsDocument2 pagesFibonacci Classroom Worksheet Solutionsf10691122No ratings yet
- A Lesson Plan in Mathematics 10 For Experimental GroupDocument10 pagesA Lesson Plan in Mathematics 10 For Experimental GroupDemz ZüNo ratings yet
- Multiple Choice Questions (Integration)Document4 pagesMultiple Choice Questions (Integration)armansafi761No ratings yet
- AB = √(g2 + f2 - c)2. Intercept made by x2 + y2 + 2gx + 2fy + c = 0 on the Y - axis Y A BDocument167 pagesAB = √(g2 + f2 - c)2. Intercept made by x2 + y2 + 2gx + 2fy + c = 0 on the Y - axis Y A BPriyanshu GuptaNo ratings yet
- Linear transformations and mappingsDocument8 pagesLinear transformations and mappingsSai RenuNo ratings yet
- Time Allowed: TWO and A Half Hours: MARCH 2019Document5 pagesTime Allowed: TWO and A Half Hours: MARCH 2019Alphonsius WongNo ratings yet
- Berry Phase and PolarizationDocument173 pagesBerry Phase and PolarizationchanchalNo ratings yet
- Opearational ManagementDocument3 pagesOpearational Managementtejasrai0% (1)
- Linear Algebra Done Right Solutions ManualDocument141 pagesLinear Algebra Done Right Solutions ManualHaley Mitchell93% (15)
- 5th Grade Science Curriculum 2017Document43 pages5th Grade Science Curriculum 2017Mark Eddieson Ong ArancelNo ratings yet
- Multiplication by Shift & Add AlgorithmDocument3 pagesMultiplication by Shift & Add AlgorithmNandagopal SivakumarNo ratings yet
- DumbthingDocument1 pageDumbthinghaliven652No ratings yet
- Friendship Lesson Plan 1Document4 pagesFriendship Lesson Plan 1api-344978347No ratings yet
- Notice for reasonable use of exam questions and solutionsThe title "TITLE Notice for reasonable use of exam questions and solutionsDocument9 pagesNotice for reasonable use of exam questions and solutionsThe title "TITLE Notice for reasonable use of exam questions and solutionsHagen Seah100% (1)
- Midterm in Teaching Math in The Primary GradesDocument6 pagesMidterm in Teaching Math in The Primary GradesJerom CanayongNo ratings yet
- Series Tips and TricksDocument5 pagesSeries Tips and TricksAzharAslamRajNo ratings yet
- Fractal: A Set Which Is Larger Than The UniverseDocument5 pagesFractal: A Set Which Is Larger Than The UniversesoumyaprakashsahuNo ratings yet
- Advanced Structural AnalysisDocument3 pagesAdvanced Structural AnalysisAmit ThoriyaNo ratings yet
- 7 - Exercises On Queueing TheoryDocument43 pages7 - Exercises On Queueing TheoryRamiro Herazo Salas0% (1)
- ProbabilityDocument23 pagesProbabilityJDR JDRNo ratings yet
- Week 7 Maths (Explore 1 & 2) - PercentagesDocument27 pagesWeek 7 Maths (Explore 1 & 2) - Percentageseshaal junaidNo ratings yet
- Differential Geometry Kaushef SalamatDocument241 pagesDifferential Geometry Kaushef SalamatLuqman ArshadNo ratings yet
- Higher MathsDocument48 pagesHigher Mathsdivya185No ratings yet
- SolidCAM 2020 HSS User GuideDocument178 pagesSolidCAM 2020 HSS User GuideatulppradhanNo ratings yet
- References Math 2 Quarter 1Document5 pagesReferences Math 2 Quarter 1Maricel Pactor GastadorNo ratings yet
- QE Determinant & Matrices (13th)Document19 pagesQE Determinant & Matrices (13th)Raju SinghNo ratings yet
- General Mathematics: Learner'S Module Unit Test To FinalDocument128 pagesGeneral Mathematics: Learner'S Module Unit Test To FinalSunshine Prantar PenaflorNo ratings yet
- Mathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingFrom EverandMathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingRating: 4.5 out of 5 stars4.5/5 (21)
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormFrom EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormRating: 5 out of 5 stars5/5 (5)
- Calculus Workbook For Dummies with Online PracticeFrom EverandCalculus Workbook For Dummies with Online PracticeRating: 3.5 out of 5 stars3.5/5 (8)
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeFrom EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticeRating: 4 out of 5 stars4/5 (2)
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsFrom EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsRating: 4.5 out of 5 stars4.5/5 (3)
- Build a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.From EverandBuild a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Rating: 5 out of 5 stars5/5 (1)
- Mental Math Secrets - How To Be a Human CalculatorFrom EverandMental Math Secrets - How To Be a Human CalculatorRating: 5 out of 5 stars5/5 (3)
- Fluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldFrom EverandFluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldRating: 3 out of 5 stars3/5 (79)
- Mental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)From EverandMental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)No ratings yet