You might also like
- Seduce Her With Your TouchDocument50 pagesSeduce Her With Your TouchMunaj Mursheed56% (9)
- New Cambridge Statistical Tables PDFDocument98 pagesNew Cambridge Statistical Tables PDFParthPahwa100% (2)
- New Cambridge Statistical Tables PDFDocument98 pagesNew Cambridge Statistical Tables PDFParthPahwa100% (2)
- Atoms in Electromagnetic Fields 2ndDocument769 pagesAtoms in Electromagnetic Fields 2ndDewald MurrayNo ratings yet
- 1a. Oscillations Synopsis (1-26)Document26 pages1a. Oscillations Synopsis (1-26)syedphy4272100% (1)
- Free VibrationsDocument27 pagesFree Vibrationshelllooo00No ratings yet
- Bio PhotonsDocument18 pagesBio PhotonsReginald L. Goodwin100% (1)
- Module 8 - Rotation of Rigid BodiesDocument11 pagesModule 8 - Rotation of Rigid BodiesAllen Simon BaulaNo ratings yet
- Dynamics Tutorial 10-Natural Vibrations-One Degree of Freedom-27p PDFDocument31 pagesDynamics Tutorial 10-Natural Vibrations-One Degree of Freedom-27p PDFmanfredm6435No ratings yet
- Wave Equation For DummiesDocument6 pagesWave Equation For DummiesagonzalezfNo ratings yet
- Frequency Hopping Planning GuideDocument80 pagesFrequency Hopping Planning GuideAttila Kovács100% (1)
- CAPE Physics Workshop Workbook 2021 - Unit 1Document31 pagesCAPE Physics Workshop Workbook 2021 - Unit 1Brandon MartinNo ratings yet
- Harmonic Motion And Circular Motion:: θ = vt / R → dθ/dt = v / R = ω /R = ω RDocument8 pagesHarmonic Motion And Circular Motion:: θ = vt / R → dθ/dt = v / R = ω /R = ω RGissela BTNo ratings yet
- Superposition of Wave FunctionsDocument6 pagesSuperposition of Wave FunctionsEric HSUNo ratings yet
- Chapter-9 Periodic MotionDocument8 pagesChapter-9 Periodic Motion2220678No ratings yet
- Core Course: What You Should KnowDocument4 pagesCore Course: What You Should KnowjalajsinghNo ratings yet
- FreeVibrationTutorial FromFreeStudy PDFDocument26 pagesFreeVibrationTutorial FromFreeStudy PDFJim HarrisNo ratings yet
- Oscillations and Waves SLDocument112 pagesOscillations and Waves SLyashitiwari011No ratings yet
- M8bfadadfbDocument23 pagesM8bfadadfbbhavyajain200569No ratings yet
- LAB Waves On A StringDocument4 pagesLAB Waves On A StringJoshua BedwardNo ratings yet
- Final Applied Physics Lab ManualDocument57 pagesFinal Applied Physics Lab ManualHuma MalikNo ratings yet
- Experiment 12: Simple Harmonic Motion: I. About The ExperimentDocument6 pagesExperiment 12: Simple Harmonic Motion: I. About The ExperimentAnurag SharmaNo ratings yet
- Chapter 7 Short QuestionDocument4 pagesChapter 7 Short QuestionranaateeqNo ratings yet
- SHM in Simple Pendulum XIDocument21 pagesSHM in Simple Pendulum XIOdayar ThangavelNo ratings yet
- Oscillation SDocument22 pagesOscillation SAjjenk ChuaaNo ratings yet
- S.# Answer Option (A) Answer Option (B) Answer Option (C) Answer Option (D)Document2 pagesS.# Answer Option (A) Answer Option (B) Answer Option (C) Answer Option (D)MUNEEB WAHEEDNo ratings yet
- 3EMX0_short_questionsDocument5 pages3EMX0_short_questionsmozesdeheiligeNo ratings yet
- Waves: Any Picture You Think It Can Represent This ChapterDocument27 pagesWaves: Any Picture You Think It Can Represent This Chapterيزيد الزهرانيNo ratings yet
- M1 - 210823 - Mechanics - Introduction and Polar CoordDocument47 pagesM1 - 210823 - Mechanics - Introduction and Polar Coordf20230796No ratings yet
- This Study Resource Was: Lab 4: Sinusoidal Functions and Simple Harmonic MotionDocument8 pagesThis Study Resource Was: Lab 4: Sinusoidal Functions and Simple Harmonic MotionashreaNo ratings yet
- SHM Motion ExplainedDocument20 pagesSHM Motion ExplainedReza RahmansyahNo ratings yet
- Null 2Document29 pagesNull 2Samaseen PrabhatNo ratings yet
- Oscillations: Simple Harmonic MotionDocument31 pagesOscillations: Simple Harmonic MotiondrfefvdsfNo ratings yet
- Physics QuizDocument17 pagesPhysics QuizReenNo ratings yet
- Harmonic Oscillations by Arghya Chatterjee Part 3Document42 pagesHarmonic Oscillations by Arghya Chatterjee Part 3Samaseen PrabhatNo ratings yet
- Lecture 5Document28 pagesLecture 5kebshaendesh1No ratings yet
- MY PHY 101 NoteDocument10 pagesMY PHY 101 Notebukolaesan48No ratings yet
- A Treatise On SHMDocument21 pagesA Treatise On SHMAnvadya KhareNo ratings yet
- Tutorial 1 c10Document14 pagesTutorial 1 c10Priyaa JayasankarNo ratings yet
- PHYS1412 - Workbook 2Document80 pagesPHYS1412 - Workbook 2condoleeza smithNo ratings yet
- Weekly Learning Activity Sheets General Physics 1 Grade 12, Quarter 2, Week 3Document6 pagesWeekly Learning Activity Sheets General Physics 1 Grade 12, Quarter 2, Week 3Shekaina Faith Cuizon LozadaNo ratings yet
- PHY11101 - Periodic MotionDocument5 pagesPHY11101 - Periodic MotionMD. SHAEKH ZAHAB CHOWDHURYNo ratings yet
- Quantum Theory of Tachyon FieldsDocument17 pagesQuantum Theory of Tachyon FieldspippoaNo ratings yet
- General Physics 1 Quarter 2: Module 3Document9 pagesGeneral Physics 1 Quarter 2: Module 3Maria Kriselle ApuhinNo ratings yet
- Assignment 1 - Simple Harmonic MotionDocument2 pagesAssignment 1 - Simple Harmonic MotionDr. Pradeep Kumar SharmaNo ratings yet
- PHYS 172H Modern Mechanics QuantizationDocument20 pagesPHYS 172H Modern Mechanics QuantizationArnab MondalNo ratings yet
- TOPIC 13 REVISION: Free and Forced OscillationsDocument13 pagesTOPIC 13 REVISION: Free and Forced OscillationsAkshayNo ratings yet
- Waves and Optics WorksheetsDocument66 pagesWaves and Optics WorksheetsVikas TomarNo ratings yet
- Mechanics V: Rotation: 1 2D Rotational KinematicsDocument15 pagesMechanics V: Rotation: 1 2D Rotational Kinematics66 SB jay gotiNo ratings yet
- PHY 113 Complete PDF-1Document66 pagesPHY 113 Complete PDF-1Joshua OkoghieNo ratings yet
- WAVES & OSCILLATIONS: UNDERSTANDING DAMPED MOTIONDocument17 pagesWAVES & OSCILLATIONS: UNDERSTANDING DAMPED MOTIONUltimate 7No ratings yet
- Application of Reynolds Transport Theorem:: The Momentum EquationDocument31 pagesApplication of Reynolds Transport Theorem:: The Momentum EquationHayder HusseinNo ratings yet
- Simulate Spring Oscillation ExperimentDocument8 pagesSimulate Spring Oscillation ExperimentThảo Hà NguyễnNo ratings yet
- Topic 4 WorksheetDocument45 pagesTopic 4 WorksheetFrknNo ratings yet
- Physics IaDocument12 pagesPhysics IaBatuhan HıdıroğluNo ratings yet
- FORM 4 Chapter 5 WavesDocument8 pagesFORM 4 Chapter 5 Wavesitzchantelle1020No ratings yet
- Application of Simple Harmonic MotionDocument6 pagesApplication of Simple Harmonic MotionNarayan VarmaNo ratings yet
- 04 C Wave BehaviorDocument106 pages04 C Wave BehaviorKatia Reales PazNo ratings yet
- DY Lect2a PDFDocument11 pagesDY Lect2a PDFAleli LojiNo ratings yet
- Important Equations in Physics A2Document6 pagesImportant Equations in Physics A2Ahmed FarooqNo ratings yet
- Important Equations in Physics A2Document6 pagesImportant Equations in Physics A2Moonis AmirNo ratings yet
- Important Equations in Physics A2Document6 pagesImportant Equations in Physics A2FireFrostNo ratings yet
- Coordinates, Phase Space, Constraints: Sourendu GuptaDocument11 pagesCoordinates, Phase Space, Constraints: Sourendu GuptaTerenzio Soldovieri C.No ratings yet
- Lecture 1Document16 pagesLecture 1Kenya LevyNo ratings yet
- HomeWork#1 RealDocument3 pagesHomeWork#1 RealKenya LevyNo ratings yet
- Inferential Statistics - Introduction - Lecture - Part4 - RealDocument19 pagesInferential Statistics - Introduction - Lecture - Part4 - RealKenya LevyNo ratings yet
- Prob Set#4-Risk - Return - ProblemsDocument4 pagesProb Set#4-Risk - Return - ProblemsKenya Levy0% (1)
- Notes-2nd Order ODE pt1Document33 pagesNotes-2nd Order ODE pt1Kenya LevyNo ratings yet
- Inferential Statistics - Introduction - Lecture - Part3 - ActualDocument9 pagesInferential Statistics - Introduction - Lecture - Part3 - ActualKenya LevyNo ratings yet
- Inferential Statistics - Introduction - Lecture - Part5 - RealDocument8 pagesInferential Statistics - Introduction - Lecture - Part5 - RealKenya LevyNo ratings yet
- Lecture Presentation - AdjustmentsDocument11 pagesLecture Presentation - AdjustmentsKenya LevyNo ratings yet
- MATH 2401 Assignment 1Document1 pageMATH 2401 Assignment 1Kenya LevyNo ratings yet
- Problem Set#5 - Valuation of Stocks and BondsDocument2 pagesProblem Set#5 - Valuation of Stocks and BondsKenya LevyNo ratings yet
- Assignment 1-MATH 2401Document2 pagesAssignment 1-MATH 2401Kenya LevyNo ratings yet
- Accumulated Values Present ValuesDocument20 pagesAccumulated Values Present ValuesKenya LevyNo ratings yet
- ACCT 1005 - Accounting Lecture Schedule and Course OverviewDocument14 pagesACCT 1005 - Accounting Lecture Schedule and Course OverviewKenya LevyNo ratings yet
- Examples Force of InterestDocument20 pagesExamples Force of InterestKenya LevyNo ratings yet
- Corporation: Stockholders ShareholdersDocument6 pagesCorporation: Stockholders ShareholdersKenya LevyNo ratings yet
- Planning and Design #2 (IMPLEMENTED)Document4 pagesPlanning and Design #2 (IMPLEMENTED)Kenya LevyNo ratings yet
- ACCT 1005 - Summary Notes 6 - Corporations - 2015Document4 pagesACCT 1005 - Summary Notes 6 - Corporations - 2015Kenya LevyNo ratings yet
- ACCT 1005 Financial Accounting Worksheet SolutionsDocument2 pagesACCT 1005 Financial Accounting Worksheet SolutionsChan SynergisticNo ratings yet
- ACCT 1005 Worksheet 1 Selected Solutions 2016 Tutorial QuestionsDocument2 pagesACCT 1005 Worksheet 1 Selected Solutions 2016 Tutorial QuestionsKenya LevyNo ratings yet
- ACCT 1005 WorkSheet 1Document5 pagesACCT 1005 WorkSheet 1Simone Bayne0% (1)
- ACCT 1005 - Suggested Solutions - BBC Lecture Questions - Cash - Accounts ReceivableDocument7 pagesACCT 1005 - Suggested Solutions - BBC Lecture Questions - Cash - Accounts ReceivableKenya LevyNo ratings yet
- Accounting For ReceivablesDocument4 pagesAccounting For ReceivablesKenya LevyNo ratings yet
- Accounting for Merchandising OperationsDocument6 pagesAccounting for Merchandising OperationsKenya LevyNo ratings yet
- Diagram Showing Set Up of Apparatus Used in Pinhole Camera ExperimentDocument3 pagesDiagram Showing Set Up of Apparatus Used in Pinhole Camera ExperimentKenya LevyNo ratings yet
- ACCT1005 Financial Assets Cash ControlsDocument12 pagesACCT1005 Financial Assets Cash ControlsJaytaylor BrownNo ratings yet
- Word File With ProgramDocument4 pagesWord File With ProgramKenya LevyNo ratings yet
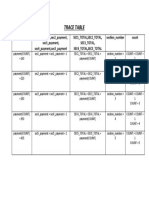
- Trace TableDocument1 pageTrace TableKenya LevyNo ratings yet
- Chapter 16 Matrices: Try These 16.1Document48 pagesChapter 16 Matrices: Try These 16.1Kenya LevyNo ratings yet
- Characteristics of Laser BeamDocument2 pagesCharacteristics of Laser BeamMohsin JuttNo ratings yet
- Acoustic LidarDocument4 pagesAcoustic LidardrphysicsNo ratings yet
- Physics questions by C.ShankarDocument5 pagesPhysics questions by C.ShankarVishnu DasNo ratings yet
- A Tutorial on Generating and Processing Microwave Signals with PhotonicsDocument20 pagesA Tutorial on Generating and Processing Microwave Signals with PhotonicsDr-Mandeep SinghNo ratings yet
- Obt751 - Analytical Methods and Instrumentation Lecture - 2Document28 pagesObt751 - Analytical Methods and Instrumentation Lecture - 2Jayashree Sathiyanarayanan100% (1)
- Lab Manuel Michelson InterformerDocument9 pagesLab Manuel Michelson InterformerAryan VaidNo ratings yet
- Required Practical - Young's Slit Experiment & Diffraction GratingsDocument31 pagesRequired Practical - Young's Slit Experiment & Diffraction GratingsrizwanNo ratings yet
- Resource theory of quantum coherence with probabilistically non-distinguishable pointersDocument10 pagesResource theory of quantum coherence with probabilistically non-distinguishable pointersLouis Peronet VergaraNo ratings yet
- "View" "Slide Show.": Resources Chapter MenuDocument76 pages"View" "Slide Show.": Resources Chapter Menuelty TanNo ratings yet
- Paganin Coherent X-Ray Optics 2006Document421 pagesPaganin Coherent X-Ray Optics 2006Francesca SiracusaNo ratings yet
- Elementary Mechanics and Oscillations and Waves Physics LabDocument16 pagesElementary Mechanics and Oscillations and Waves Physics LabAlok ThakkarNo ratings yet
- 1 6 Williamson1994Document16 pages1 6 Williamson1994Hien NguyenNo ratings yet
- Laser Lecture 3Document29 pagesLaser Lecture 3yo391174No ratings yet
- PublicDocument10 pagesPublicGovardhan DigumurthiNo ratings yet
- Topical - Diffraction AL ST QDocument12 pagesTopical - Diffraction AL ST QSaleem KhanNo ratings yet
- Basic Quantum Mechanical ConceptsDocument38 pagesBasic Quantum Mechanical ConceptspticicaaaNo ratings yet
- Physics: Laboratory ExperimentsDocument12 pagesPhysics: Laboratory ExperimentsVera PrawestianaInstitut Teknologi SumateraNo ratings yet
- Quantum Mechanics - An Introduction For Device Physicists and Electrical Engineers, Second EditionDocument355 pagesQuantum Mechanics - An Introduction For Device Physicists and Electrical Engineers, Second Editionhosny1987100% (2)
- Time-frequency analysis of biophysical signalsDocument42 pagesTime-frequency analysis of biophysical signalsMartin LukáčNo ratings yet
- Digital Handheld Optical Power and Energy Meter ConsoleDocument11 pagesDigital Handheld Optical Power and Energy Meter Consolenguyen sonNo ratings yet
- High-NOON States by Mixing Quantum and Classical LightDocument4 pagesHigh-NOON States by Mixing Quantum and Classical LightItamar e Waneska sem sobrenomeNo ratings yet
- Digital Image Processing - Lecture Weeks 1&2 PDFDocument50 pagesDigital Image Processing - Lecture Weeks 1&2 PDFJorma KekalainenNo ratings yet
- Young's Double Slit Exp QuestionsDocument13 pagesYoung's Double Slit Exp QuestionsP1koNo ratings yet
- Tutorial LightDocument3 pagesTutorial LightNorKamilahMakhtarNo ratings yet