You might also like
- PSSE Power Flow and Steady State Online Course Notes 1Document504 pagesPSSE Power Flow and Steady State Online Course Notes 1Hamza Abarchi Halarou100% (1)
- CES 512: Finite Element Method Introduction, Theory, Applications & ImplementationDocument32 pagesCES 512: Finite Element Method Introduction, Theory, Applications & Implementationshamsukarim2009No ratings yet
- Design of Steel BeamsDocument25 pagesDesign of Steel Beamsronaldnyirenda2230No ratings yet
- STE Action Plan 2021-2022Document5 pagesSTE Action Plan 2021-2022Bernadette L. Macadangdang100% (1)
- Fatigue PropertiesDocument55 pagesFatigue PropertiesMostafa AdilNo ratings yet
- 1D Spring System SimulationDocument47 pages1D Spring System SimulationSandeep GogadiNo ratings yet
- Fsc1 Sample Eng Obe QP v2 FinalDocument5 pagesFsc1 Sample Eng Obe QP v2 FinalAsu AsuNo ratings yet
- General Tables & Fields Primavera P6Document54 pagesGeneral Tables & Fields Primavera P6José Antonio Ferrer GutiérrezNo ratings yet
- Chap 2 Bar & Truss Finite Element Direct Stiffness Method: Finite Element Analysis and Design Nam-Ho KimDocument52 pagesChap 2 Bar & Truss Finite Element Direct Stiffness Method: Finite Element Analysis and Design Nam-Ho KimHemanth RaoNo ratings yet
- Elementos FinitosDocument72 pagesElementos FinitosPedro Leos100% (1)
- MECH5605 - 2 - 1 - Direct Approach - Scalar Spring SystemDocument17 pagesMECH5605 - 2 - 1 - Direct Approach - Scalar Spring SystemAkthamLoranseMansiNo ratings yet
- Finite Element Analysis of 1D ProblemsDocument50 pagesFinite Element Analysis of 1D ProblemsvinothksNo ratings yet
- AE420 Chpt3 Fall 2021 (Part1)Document37 pagesAE420 Chpt3 Fall 2021 (Part1)LIU HengxuNo ratings yet
- General Programming Procedure For Finite Element Method: (Using MAPLE)Document27 pagesGeneral Programming Procedure For Finite Element Method: (Using MAPLE)AbdallahNo ratings yet
- The Structure Factor The Structure Factor: Suggested ReadingDocument28 pagesThe Structure Factor The Structure Factor: Suggested ReadingShubhamNo ratings yet
- 5 - Ví Dụ Minh Họa Cơ Sở Lý Thuyết - PP PTHHDocument48 pages5 - Ví Dụ Minh Họa Cơ Sở Lý Thuyết - PP PTHHB K LNo ratings yet
- MAE563 Bar and TrussDocument22 pagesMAE563 Bar and TrussastrobarbyNo ratings yet
- Lect01 - Discreter Element Example of FEM - Fall 2023Document8 pagesLect01 - Discreter Element Example of FEM - Fall 2023Naresh DamaNo ratings yet
- E E 417/517/510 Electromagnetic Radiation, Antennas, and PropagationDocument13 pagesE E 417/517/510 Electromagnetic Radiation, Antennas, and PropagationAvatarOfWoe 903No ratings yet
- Topic 6b4-FINITE ELEMENT METHOD (FEM) - TRUSSDocument39 pagesTopic 6b4-FINITE ELEMENT METHOD (FEM) - TRUSSAimy ShahrilNo ratings yet
- Quadrilateral Elements ReviewDocument10 pagesQuadrilateral Elements ReviewRaja ShekarNo ratings yet
- FEA - Lecture - 1 - Introduction - &skeletal - SystemsDocument145 pagesFEA - Lecture - 1 - Introduction - &skeletal - SystemsBANTI ROYNo ratings yet
- Curs 1 MEF PDFDocument22 pagesCurs 1 MEF PDFParagina IulianNo ratings yet
- CE5610 Finite Element Analysis January - May 2019: Tutorial - 10: 3D and Plate ElementsDocument1 pageCE5610 Finite Element Analysis January - May 2019: Tutorial - 10: 3D and Plate ElementsPhanendra Kumar AttadaNo ratings yet
- Pile Lateral Load CapacityDocument18 pagesPile Lateral Load CapacityBrhane W YgzawNo ratings yet
- 2 Elements of Solid MechanicsDocument38 pages2 Elements of Solid MechanicsIgor OliveiraNo ratings yet
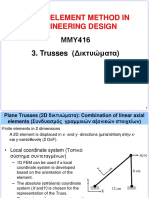
- Finite Element Method for Truss Analysis and DesignDocument30 pagesFinite Element Method for Truss Analysis and DesignPavlos YioukkasNo ratings yet
- Matrix Analysis, Grillage, Intro To Finite Element Modeling: X, U Y, VDocument8 pagesMatrix Analysis, Grillage, Intro To Finite Element Modeling: X, U Y, VJb VenierNo ratings yet
- Paper - Planar Discrete Isothermic Nets of Conical Type - Nº01Document22 pagesPaper - Planar Discrete Isothermic Nets of Conical Type - Nº01enzoNo ratings yet
- Stress Lecture 6: Isoparametric Elements and Numerical IntegrationDocument47 pagesStress Lecture 6: Isoparametric Elements and Numerical IntegrationOmphemetse CindiNo ratings yet
- FEA Preliminaries Chapter (40Document16 pagesFEA Preliminaries Chapter (40sakeriraq81No ratings yet
- Chapter 4Document20 pagesChapter 4Usha GautamNo ratings yet
- Fourier Transform and LensDocument8 pagesFourier Transform and LensvigneshNo ratings yet
- Module 6Document67 pagesModule 6Anil NiranjNo ratings yet
- The SIMPLE Algorithm For Pressure-Velocity Coupling: ME 448/548 NotesDocument26 pagesThe SIMPLE Algorithm For Pressure-Velocity Coupling: ME 448/548 NotesChadwickajiNo ratings yet
- Chapter Two: Finite Element Approximation TechniquesDocument53 pagesChapter Two: Finite Element Approximation TechniquesSURAFEL BIYAZENNo ratings yet
- OCW SKAA1213 02 Resultant and Resolution of Forces Part 1Document23 pagesOCW SKAA1213 02 Resultant and Resolution of Forces Part 1ailyn joi rodilNo ratings yet
- Activity 5 - Electron ConfigurationDocument6 pagesActivity 5 - Electron Configurationfernanda.martinezlNo ratings yet
- Statics of Particles Chapter SummaryDocument21 pagesStatics of Particles Chapter SummaryhidayatullahNo ratings yet
- Ifem051 w5Document29 pagesIfem051 w5derick0320No ratings yet
- FEA2 The Basic FEA ProcedureDocument22 pagesFEA2 The Basic FEA ProcedureOmom MyeNo ratings yet
- 2D ElementDocument22 pages2D ElementGabriel ChungNo ratings yet
- JDWUAH Optoelectronics Ch7Document31 pagesJDWUAH Optoelectronics Ch7Sheldon CooperNo ratings yet
- Struktur Rangka BidangDocument27 pagesStruktur Rangka BidangnizarNo ratings yet
- LASERs PDFDocument84 pagesLASERs PDFGautam NarayanNo ratings yet
- Photonic Sources of LightDocument26 pagesPhotonic Sources of LightNaveen KumarNo ratings yet
- FALLSEM2019-20 ECE1007 TH VL2019201001510 Reference Material I 05-Sep-2019 5. LASERDocument62 pagesFALLSEM2019-20 ECE1007 TH VL2019201001510 Reference Material I 05-Sep-2019 5. LASERnidhi patelNo ratings yet
- Truss Matrix Chapter 5Document84 pagesTruss Matrix Chapter 5haziq100% (1)
- PHY104 ProjectDocument17 pagesPHY104 ProjectYash ShahNo ratings yet
- 5th Order Polynomial Hilton ExpressDocument10 pages5th Order Polynomial Hilton ExpresscvcNo ratings yet
- Equilibrium of Particles and Forces in Multiple DirectionsDocument16 pagesEquilibrium of Particles and Forces in Multiple DirectionsHeinz DoofenshmirtzNo ratings yet
- Laboratory Mechanisms Practical WorksDocument11 pagesLaboratory Mechanisms Practical WorksGabriel IulianNo ratings yet
- Direct and Min Total PE FormulationDocument12 pagesDirect and Min Total PE FormulationMansoorNo ratings yet
- Fem Unit IDocument34 pagesFem Unit ISAIKUMAR ANo ratings yet
- Particles - 3D - Resultant ForceDocument26 pagesParticles - 3D - Resultant ForceDuarte Júnio Motorsport EngineerNo ratings yet
- Parameter Estimation of Bouc-Wen Hysteretic Systems by Sawtooth Genetic AlgorithmDocument18 pagesParameter Estimation of Bouc-Wen Hysteretic Systems by Sawtooth Genetic Algorithmutsav_koshtiNo ratings yet
- Numerical analysis of slub yarn breaking strength using FEMDocument4 pagesNumerical analysis of slub yarn breaking strength using FEMTemesgen RegassaNo ratings yet
- Chap6 PDFDocument62 pagesChap6 PDFmahmoud BiomyNo ratings yet
- Optics I 2017 Chapter4 PDFDocument17 pagesOptics I 2017 Chapter4 PDFAnas BachiriNo ratings yet
- Principle of Diode Laser: EBB424E DR Zainovia LockmanDocument29 pagesPrinciple of Diode Laser: EBB424E DR Zainovia Lockmankrishnak_ece7077No ratings yet
- FEA of Beam StructuresDocument38 pagesFEA of Beam StructuresHari Krishna PrasadNo ratings yet
- Waveguide Analysis Setup: Lecture OutlineDocument21 pagesWaveguide Analysis Setup: Lecture OutlineRyanNo ratings yet
- For The Truss Shown in The Figure Below, A Horizontal Load of 20 000 N Is Applied in The X-Direction at Node 2Document10 pagesFor The Truss Shown in The Figure Below, A Horizontal Load of 20 000 N Is Applied in The X-Direction at Node 2Mostafa AdilNo ratings yet
- Constant Strain Triangle (CST)Document32 pagesConstant Strain Triangle (CST)Mostafa AdilNo ratings yet
- FEMLecture 6Document10 pagesFEMLecture 6Mostafa AdilNo ratings yet
- FEMLecture 6Document10 pagesFEMLecture 6Mostafa AdilNo ratings yet
- FEM Chapter 4 Beam ElementDocument16 pagesFEM Chapter 4 Beam ElementAdemar CardosoNo ratings yet
- 12 - Fatigue of MetalsDocument55 pages12 - Fatigue of Metalsvoldemorts100% (1)
- Finite Element Method: An IntroductionDocument16 pagesFinite Element Method: An IntroductionMostafa AdilNo ratings yet
- Bar & Truss Finite Element Direct Stiffness MethodDocument24 pagesBar & Truss Finite Element Direct Stiffness MethodMostafa AdilNo ratings yet
- 12 - Fatigue of MetalsDocument55 pages12 - Fatigue of Metalsvoldemorts100% (1)
- Deep Drawing Dies Design Using SimulationDocument154 pagesDeep Drawing Dies Design Using SimulationajaymechengineerNo ratings yet
- 06 Strengthening MechanismsDocument63 pages06 Strengthening Mechanismspranavkumarparit100% (2)
- Fracture: Subjects of InterestDocument37 pagesFracture: Subjects of InterestMostafa AdilNo ratings yet
- 07 FractureDocument38 pages07 FractureTakorn WeyheyNo ratings yet
- Lec 2Document21 pagesLec 2Mostafa AdilNo ratings yet
- 06 Strengthening MechanismsDocument63 pages06 Strengthening Mechanismspranavkumarparit100% (2)
- Lecture 1 CAD/CAM Branch Third ClassDocument21 pagesLecture 1 CAD/CAM Branch Third ClassMostafa AdilNo ratings yet
- Thesis EDM PDFDocument72 pagesThesis EDM PDFMohamad HarithNo ratings yet
- Studying The Affect of Current On (MRR) and (EW) in Electrical Discharge Machining (EDM)Document15 pagesStudying The Affect of Current On (MRR) and (EW) in Electrical Discharge Machining (EDM)Mostafa AdilNo ratings yet
- 49 12 20Document9 pages49 12 20Mostafa AdilNo ratings yet
- Springback in Sheet Metal U Bending-Fea and Neural Network ApproachDocument5 pagesSpringback in Sheet Metal U Bending-Fea and Neural Network ApproachMostafa AdilNo ratings yet
- AnnDocument10 pagesAnnMostafa AdilNo ratings yet
- Experimental Investigation of Machining Parameters For EDM Using Rectangular Shaped Electrode of en 31 SteelDocument3 pagesExperimental Investigation of Machining Parameters For EDM Using Rectangular Shaped Electrode of en 31 SteelMostafa Adil0% (1)
- Investigating Effect of Machining Parame PDFDocument6 pagesInvestigating Effect of Machining Parame PDFMostafa AdilNo ratings yet
- 56867Document13 pages56867Mostafa AdilNo ratings yet
- P316 321Document6 pagesP316 321Mostafa AdilNo ratings yet
- 4 CuttingDocument62 pages4 CuttingParvez WaghooNo ratings yet
- Cutting Tool MaterialsDocument35 pagesCutting Tool MaterialsMostafa AdilNo ratings yet
- Lec 9Document22 pagesLec 9Sreenivas BathinaNo ratings yet
- D3E804F51B6-02T 5-Speed Manual GearboxDocument133 pagesD3E804F51B6-02T 5-Speed Manual GearboxjorgebautistagarciaNo ratings yet
- EN14181 Asig Calitatii CEMSDocument45 pagesEN14181 Asig Calitatii CEMSbrctlnNo ratings yet
- Solarnative BatteryBrick Data-Sheet-V0.3Document3 pagesSolarnative BatteryBrick Data-Sheet-V0.3Pedro fuenmayorNo ratings yet
- Advanced Composite MaterialDocument15 pagesAdvanced Composite MaterialSandeep KumarNo ratings yet
- 2 Vias-EgoDocument10 pages2 Vias-Egoleonardo osmelNo ratings yet
- Additive Manufacturing Processes and ApplicationsDocument3 pagesAdditive Manufacturing Processes and ApplicationsNishant MayekarNo ratings yet
- Fire DoorsDocument12 pagesFire DoorsAjayy VaghelaNo ratings yet
- Programming Assignment Unit 5 Solution v2Document3 pagesProgramming Assignment Unit 5 Solution v2Everything PromoNo ratings yet
- Thunderbird X 500 Spare PartsDocument16 pagesThunderbird X 500 Spare PartsArihant BothraNo ratings yet
- Qmt181 Assignment Group.Document18 pagesQmt181 Assignment Group.Hazwani Sanusi100% (1)
- Inglés Técnico 01Document23 pagesInglés Técnico 01Stefany DulkaNo ratings yet
- Q4FY23 Investor PresentationDocument49 pagesQ4FY23 Investor PresentationAradhyaNo ratings yet
- Catalogo VPFT 4535Document91 pagesCatalogo VPFT 4535PRISCILA FAGUNDESNo ratings yet
- Kandi. Sai Pavan Kumar: Career ObjectiveDocument2 pagesKandi. Sai Pavan Kumar: Career ObjectiveSai PavanNo ratings yet
- Dynamelt LC Series - MasterDocument2 pagesDynamelt LC Series - MasterITWDynatecNo ratings yet
- SALOM LogicResourceDocument162 pagesSALOM LogicResourceAsela SubhasingheNo ratings yet
- Assignment & LabDocument5 pagesAssignment & LabXyus PoudelNo ratings yet
- Microprocessors Memory Addressing Modes PaperDocument2 pagesMicroprocessors Memory Addressing Modes PaperMimansha SharmaNo ratings yet
- Circuit Symbols PDFDocument9 pagesCircuit Symbols PDFStefanos Duris100% (1)
- IIIT Sonepat Detailed Advertisement Assistant Professor Associate Professor FinalDocument6 pagesIIIT Sonepat Detailed Advertisement Assistant Professor Associate Professor FinalGv IIITNo ratings yet
- Quot - Leak Tester BP Ridwan - PTI Cosmetics - 08apr21Document6 pagesQuot - Leak Tester BP Ridwan - PTI Cosmetics - 08apr21mario gultomNo ratings yet
- Science: Modul E 1 Lesson 1: General ConceptsDocument6 pagesScience: Modul E 1 Lesson 1: General ConceptsORTILE, IVAN H.No ratings yet
- Dwnload Full Assembly Language For x86 Processors 7th Edition Irvine Test Bank PDFDocument33 pagesDwnload Full Assembly Language For x86 Processors 7th Edition Irvine Test Bank PDFjovialtybowbentqjkz88100% (14)
- LAC 1 Session GuideDocument1 pageLAC 1 Session GuideCherry CarlosNo ratings yet
- S Siva Kishore Project - BADocument5 pagesS Siva Kishore Project - BAosuri sudheer kumarNo ratings yet
- 3 - MT 103 - 202 Base Procedure For Receiver Review and Comments AoDocument4 pages3 - MT 103 - 202 Base Procedure For Receiver Review and Comments Aouink wowNo ratings yet