
Chapter 8. Converter Transfer Functions: 8.1. Review of Bode Plots
Chapter 8. Converter Transfer Functions: 8.1. Review of Bode Plots
You might also like
- ADC - Sound Shaper Tree - Manul ServicioDocument41 pagesADC - Sound Shaper Tree - Manul ServicioCarol Eduardo Apitz DíazNo ratings yet
- Lab Report 2Document6 pagesLab Report 2Abdul Aziz ZulkifliNo ratings yet
- Chapter 7 Mosfets in Ics - Scaling, Leakage, and Other TopicsDocument43 pagesChapter 7 Mosfets in Ics - Scaling, Leakage, and Other Topicsmorcov19No ratings yet
- Invoice: FromDocument1 pageInvoice: FromMaxNo ratings yet
- Unit 22 Ass1 - LO12 - FinalDocument5 pagesUnit 22 Ass1 - LO12 - FinalMaxNo ratings yet
- Adc PDFDocument62 pagesAdc PDFAkhilesh TewaryNo ratings yet
- Eetop - CN ADC LayoutDocument199 pagesEetop - CN ADC LayoutVishnuGundaNo ratings yet
- Adc DacDocument15 pagesAdc Dackranthi59No ratings yet
- Analog-Digital Converters: By: Saumya Ranjan BehuraDocument62 pagesAnalog-Digital Converters: By: Saumya Ranjan Behuraparth bhardwajNo ratings yet
- Adc F09Document61 pagesAdc F09abdala67No ratings yet
- Final Exam 15-06-2012 (Answered)Document4 pagesFinal Exam 15-06-2012 (Answered)Cristian ToapantaNo ratings yet
- Fonction de Transfert Du CV Buck Boost - ExpDocument5 pagesFonction de Transfert Du CV Buck Boost - ExpbmmostefaNo ratings yet
- 14 D J 2011 - S 3.9 E Viii 13:00/16:00H: Departamento de Engenharia Electrotécnica 1º E E IIIDocument2 pages14 D J 2011 - S 3.9 E Viii 13:00/16:00H: Departamento de Engenharia Electrotécnica 1º E E IIIHelder CruzNo ratings yet
- Chapter 8. Converter Transfer Functions: 8.1. Review of Bode PlotsDocument103 pagesChapter 8. Converter Transfer Functions: 8.1. Review of Bode Plotsbojan 2No ratings yet
- FEE 402 Section1Document15 pagesFEE 402 Section1yozuaoukoNo ratings yet
- Multilevel Inverter With Reducing Device Count:: Project Batch-15Document20 pagesMultilevel Inverter With Reducing Device Count:: Project Batch-15madhu madhaviNo ratings yet
- ECE4205 Design Problem 3Document17 pagesECE4205 Design Problem 3Yasser JrNo ratings yet
- Online Control Lecture - 8.pdfDocument13 pagesOnline Control Lecture - 8.pdfAmylia NatashaNo ratings yet
- Mechatronics Unit-5Document29 pagesMechatronics Unit-5nagsanthosh3No ratings yet
- ConvertersDocument54 pagesConvertersyoboiiii649No ratings yet
- Formats For Repair and MAintainance, Consumables, Equipment, Library Books-1Document14 pagesFormats For Repair and MAintainance, Consumables, Equipment, Library Books-1Pooja AshishNo ratings yet
- WK 12 FR Bode Plot Nyquist May 11,2015Document104 pagesWK 12 FR Bode Plot Nyquist May 11,2015biruk1No ratings yet
- 12422,12439,12444, 12448 Experiment No. 10: BJT Differential Amplifier O EDocument8 pages12422,12439,12444, 12448 Experiment No. 10: BJT Differential Amplifier O E5682 AatqaNo ratings yet
- 12422,12439,12444, 12448 Experiment No. 10: BJT Differential Amplifier O EDocument8 pages12422,12439,12444, 12448 Experiment No. 10: BJT Differential Amplifier O E5682 AatqaNo ratings yet
- EE31594 Quiz 4 Dec 14, 2019Document8 pagesEE31594 Quiz 4 Dec 14, 2019Hyunsog ChoiNo ratings yet
- Sampleproblems2 PDFDocument4 pagesSampleproblems2 PDFJose Martin Cisneros MandujanoNo ratings yet
- Frequency Response and Bode PlotsDocument43 pagesFrequency Response and Bode Plotszulusiphosi9No ratings yet
- Formats For Repair and MAintainance, Consumables, Equipment, Library BooksDocument14 pagesFormats For Repair and MAintainance, Consumables, Equipment, Library BooksPooja AshishNo ratings yet
- ADCsDocument15 pagesADCsEnrico LiaNo ratings yet
- Build A DC DC Convertor - Build Club ManualDocument13 pagesBuild A DC DC Convertor - Build Club ManualnelspnNo ratings yet
- Universidad Politecnica Salesiana. Laboratorio Analogica: Practica 5: Análisis de Característica de Un Diodo A SilicioDocument3 pagesUniversidad Politecnica Salesiana. Laboratorio Analogica: Practica 5: Análisis de Característica de Un Diodo A SiliciojefersonNo ratings yet
- EP50S Series: Diameter Ø50mm Shaft Type Absolute Rotary EncoderDocument5 pagesEP50S Series: Diameter Ø50mm Shaft Type Absolute Rotary EncoderEeeeeNo ratings yet
- ADDA Lecture P1Document28 pagesADDA Lecture P1MayaNo ratings yet
- Chapter 9. Controller Design: 9.2. Effect of Negative Feedback On The Network Transfer FunctionsDocument74 pagesChapter 9. Controller Design: 9.2. Effect of Negative Feedback On The Network Transfer FunctionsHoang ManhNo ratings yet
- Assignment 4Document6 pagesAssignment 4Vaidhyanadhan DeepakNo ratings yet
- Noninverting Circuit For High-To-Low Voltage Level Translation Very ImportantDocument7 pagesNoninverting Circuit For High-To-Low Voltage Level Translation Very Importantsung quekNo ratings yet
- Lab 2 Common Source Amplifier With Resistor Load and Source DegenerationDocument16 pagesLab 2 Common Source Amplifier With Resistor Load and Source DegenerationChristian Allan LumakinNo ratings yet
- Faculty of Engineering: Circuits and Signals EEL 2186 TRIMESTER 1 (2014/2015)Document7 pagesFaculty of Engineering: Circuits and Signals EEL 2186 TRIMESTER 1 (2014/2015)Rameshkumar JayaramanNo ratings yet
- ADC Test Book FinalDocument25 pagesADC Test Book FinalMohammed MohammedaliNo ratings yet
- 2.diode Clipper and ClamperDocument12 pages2.diode Clipper and ClamperMounika AllagaddaNo ratings yet
- Nte 1866Document2 pagesNte 1866flackoledzzNo ratings yet
- LC 89950Document5 pagesLC 89950nisha770No ratings yet
- Analog-To-Digital (A/D) and Digital-To-Analog (D/A) ConversionDocument15 pagesAnalog-To-Digital (A/D) and Digital-To-Analog (D/A) ConversionproteuscarrillusNo ratings yet
- Chap 8 TraDocument14 pagesChap 8 TraAndreeaNo ratings yet
- Az Displays: Specifications For Liquid Crystal DisplayDocument14 pagesAz Displays: Specifications For Liquid Crystal DisplaycarlosgnNo ratings yet
- 351 - 27435 - EE419 - 2020 - 1 - 2 - 1 - 0 3 EE419 Lec4,5 Compensation-BodeDocument39 pages351 - 27435 - EE419 - 2020 - 1 - 2 - 1 - 0 3 EE419 Lec4,5 Compensation-BodeDonna NobartNo ratings yet
- Adc Dac 2Document7 pagesAdc Dac 2sabin3sNo ratings yet
- Analog Electronics Lab ManualDocument9 pagesAnalog Electronics Lab ManualRohan KatkamNo ratings yet
- AQU4518R0: Antenna SpecificationsDocument3 pagesAQU4518R0: Antenna SpecificationsalpahNo ratings yet
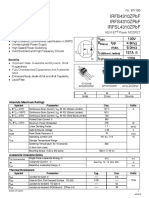
- Irfb4310Zpbf Irfs4310Zpbf Irfsl4310Zpbf: V 100V R Typ. 4.8M: Max. 6.0M: I 127A C I 120ADocument11 pagesIrfb4310Zpbf Irfs4310Zpbf Irfsl4310Zpbf: V 100V R Typ. 4.8M: Max. 6.0M: I 127A C I 120ALuis FigueroaNo ratings yet
- EECS3611 Chapter1Document19 pagesEECS3611 Chapter1nickbekiaris05No ratings yet
- Week 3Document97 pagesWeek 3abbazh rakhondeNo ratings yet
- ADC0820Document22 pagesADC0820Michael PuncelNo ratings yet
- 28 - Disha BE Lab JournalDocument28 pages28 - Disha BE Lab JournalCH007No ratings yet
- Module 6Document34 pagesModule 6Debasis ChandraNo ratings yet
- Control Systems: GATE Objective & Numerical Type SolutionsDocument9 pagesControl Systems: GATE Objective & Numerical Type SolutionsAakash DewanganNo ratings yet
- VHDL AssignmentDocument2 pagesVHDL AssignmentRaja RamNo ratings yet
- Service Manual: Rmx-40 DSPDocument49 pagesService Manual: Rmx-40 DSPSándor VámosNo ratings yet
- Chenming Hu ch7 SlidesDocument43 pagesChenming Hu ch7 SlideseleenaamohapatraNo ratings yet
- Lecture38-High Speed Nyquist AdcsDocument32 pagesLecture38-High Speed Nyquist AdcsHuyBinh LeNo ratings yet
- DAC With 8051Document18 pagesDAC With 8051BharathNo ratings yet
- Ids and Net Names in The Multisim Network. Furthermore, The Use of TransientDocument3 pagesIds and Net Names in The Multisim Network. Furthermore, The Use of TransientMaxNo ratings yet
- Session 2: Practical Experiments in Phase MeasurementDocument13 pagesSession 2: Practical Experiments in Phase MeasurementMaxNo ratings yet
- Session 1: Practical Experiments On Summing Amplifiers 1.5.0 To Construct A Non-Inverting Summing AmplifierDocument11 pagesSession 1: Practical Experiments On Summing Amplifiers 1.5.0 To Construct A Non-Inverting Summing AmplifierMaxNo ratings yet
- Lab Diary TemplateDocument4 pagesLab Diary TemplateMaxNo ratings yet
- Session 1: Multisim ExperimentsDocument7 pagesSession 1: Multisim ExperimentsMaxNo ratings yet
- Cardiff School of Computer Science and Informatics: Coursework Assessment Pro-FormaDocument5 pagesCardiff School of Computer Science and Informatics: Coursework Assessment Pro-FormaMaxNo ratings yet
- Truss Report SampleDocument8 pagesTruss Report SampleMaxNo ratings yet
- Ab1 - Engieering Design 2020-21 FinalDocument3 pagesAb1 - Engieering Design 2020-21 FinalMaxNo ratings yet
- Truss With MatlabDocument2 pagesTruss With MatlabMaxNo ratings yet
- Ai WP 267Document20 pagesAi WP 267Nicu MoiseNo ratings yet
- An Assessment of Five (PANSS, SAPS, SANS, NSA-16, CGI-SCH) CommonlyDocument7 pagesAn Assessment of Five (PANSS, SAPS, SANS, NSA-16, CGI-SCH) Commonlysyarifah husna100% (1)
- Subnetting Questions 2Document11 pagesSubnetting Questions 2smzohaibabbasNo ratings yet
- Specification For Low Voltage Switchgear and Control AssembliesDocument10 pagesSpecification For Low Voltage Switchgear and Control AssembliesProfessional Trust0% (1)
- Approved Final Specification Lan ExtenderDocument13 pagesApproved Final Specification Lan ExtenderShubham KumarNo ratings yet
- Pumps and Pumping SystemsDocument88 pagesPumps and Pumping SystemssrathinakumarNo ratings yet
- Fluid Placement and Pumping StrategyDocument30 pagesFluid Placement and Pumping Strategysersa69No ratings yet
- Sample Nutritional Status Grade 7Document43 pagesSample Nutritional Status Grade 7Lu Zie NelNo ratings yet
- E 90 48Document4 pagesE 90 48Agus Qupink Luph AriaNo ratings yet
- ABB - Fuse-Links Type CEF - ENDocument12 pagesABB - Fuse-Links Type CEF - ENavegam2008No ratings yet
- Towards A Security Architecture For SubstationsDocument6 pagesTowards A Security Architecture For SubstationsSofyan AndikaNo ratings yet
- WWW - Mindbox.co - in Private and ConfidentialDocument16 pagesWWW - Mindbox.co - in Private and Confidentialgeetesh waghelaNo ratings yet
- The Role of Geosynthetics in Slope Stability: ArticleDocument11 pagesThe Role of Geosynthetics in Slope Stability: ArticleB Divya jyothiNo ratings yet
- Hvac Hvac E20 E20Document1 pageHvac Hvac E20 E20Shashank GinjupalliNo ratings yet
- H-026 Thermo. Titr. Application Note No.: Title: Determination of Caustic, Carbonate and Alumina in Bayer Process LiquorsDocument3 pagesH-026 Thermo. Titr. Application Note No.: Title: Determination of Caustic, Carbonate and Alumina in Bayer Process LiquorsRuben HernandezNo ratings yet
- 11th Class Thermodynamic Chapter Total MarksDocument2 pages11th Class Thermodynamic Chapter Total Markssiddhesh bhate100% (1)
- Weidmuller Ferrules White PaperDocument6 pagesWeidmuller Ferrules White PapertotovasiNo ratings yet
- 1.hư NG M I (AI For RA)Document11 pages1.hư NG M I (AI For RA)Thao Hoang PhuongNo ratings yet
- Fledermaus-8 5 1-DocumentationDocument562 pagesFledermaus-8 5 1-DocumentationMizta RameshNo ratings yet
- OlymphysicsDocument6 pagesOlymphysicslokiiiNo ratings yet
- NDP6060 116149Document13 pagesNDP6060 116149Alceu DluzniewskiNo ratings yet
- Spotlight Advanced Day 4 in Class Assignment Physics Que & AnswerDocument18 pagesSpotlight Advanced Day 4 in Class Assignment Physics Que & Answerazra faridiNo ratings yet
- Cambridge IGCSE™: Mathematics 0580/21 May/June 2020Document7 pagesCambridge IGCSE™: Mathematics 0580/21 May/June 2020Nicole MpehlaNo ratings yet
- Dual Sisded Shaper Machine Final EditionDocument34 pagesDual Sisded Shaper Machine Final EditionMikyas BelayNo ratings yet
- Theories About The Origin of The UniverseDocument5 pagesTheories About The Origin of The UniverseJasmine MaturanNo ratings yet
- GUIDE TO THE TRAINING OF SUPERVISORS FOR LABOUR-BASED ROAD CONSTRUCTION AND MAINTENANCE 1B09 - 888 - v2 - EnglDocument259 pagesGUIDE TO THE TRAINING OF SUPERVISORS FOR LABOUR-BASED ROAD CONSTRUCTION AND MAINTENANCE 1B09 - 888 - v2 - Englsealord001okNo ratings yet
- Cro ChordsDocument255 pagesCro ChordsDavor Posavec80% (5)
- By Alone Wolf Group: There Are Five Logical ConnectivesDocument3 pagesBy Alone Wolf Group: There Are Five Logical ConnectivesMuhammad ZeeshanNo ratings yet
- Catálogo - de - Bujias Coches - 2012-2013Document868 pagesCatálogo - de - Bujias Coches - 2012-2013argarrido123No ratings yet
- U C T M Center For Hydrogen Technology, BulgariaDocument20 pagesU C T M Center For Hydrogen Technology, BulgariaMohd Fahmi Muhammad MubarakNo ratings yet


































































































You might also like
- ADC - Sound Shaper Tree - Manul ServicioDocument41 pagesADC - Sound Shaper Tree - Manul ServicioCarol Eduardo Apitz DíazNo ratings yet
- Lab Report 2Document6 pagesLab Report 2Abdul Aziz ZulkifliNo ratings yet
- Chapter 7 Mosfets in Ics - Scaling, Leakage, and Other TopicsDocument43 pagesChapter 7 Mosfets in Ics - Scaling, Leakage, and Other Topicsmorcov19No ratings yet
- Invoice: FromDocument1 pageInvoice: FromMaxNo ratings yet
- Unit 22 Ass1 - LO12 - FinalDocument5 pagesUnit 22 Ass1 - LO12 - FinalMaxNo ratings yet
- Adc PDFDocument62 pagesAdc PDFAkhilesh TewaryNo ratings yet
- Eetop - CN ADC LayoutDocument199 pagesEetop - CN ADC LayoutVishnuGundaNo ratings yet
- Adc DacDocument15 pagesAdc Dackranthi59No ratings yet
- Analog-Digital Converters: By: Saumya Ranjan BehuraDocument62 pagesAnalog-Digital Converters: By: Saumya Ranjan Behuraparth bhardwajNo ratings yet
- Adc F09Document61 pagesAdc F09abdala67No ratings yet
- Final Exam 15-06-2012 (Answered)Document4 pagesFinal Exam 15-06-2012 (Answered)Cristian ToapantaNo ratings yet
- Fonction de Transfert Du CV Buck Boost - ExpDocument5 pagesFonction de Transfert Du CV Buck Boost - ExpbmmostefaNo ratings yet
- 14 D J 2011 - S 3.9 E Viii 13:00/16:00H: Departamento de Engenharia Electrotécnica 1º E E IIIDocument2 pages14 D J 2011 - S 3.9 E Viii 13:00/16:00H: Departamento de Engenharia Electrotécnica 1º E E IIIHelder CruzNo ratings yet
- Chapter 8. Converter Transfer Functions: 8.1. Review of Bode PlotsDocument103 pagesChapter 8. Converter Transfer Functions: 8.1. Review of Bode Plotsbojan 2No ratings yet
- FEE 402 Section1Document15 pagesFEE 402 Section1yozuaoukoNo ratings yet
- Multilevel Inverter With Reducing Device Count:: Project Batch-15Document20 pagesMultilevel Inverter With Reducing Device Count:: Project Batch-15madhu madhaviNo ratings yet
- ECE4205 Design Problem 3Document17 pagesECE4205 Design Problem 3Yasser JrNo ratings yet
- Online Control Lecture - 8.pdfDocument13 pagesOnline Control Lecture - 8.pdfAmylia NatashaNo ratings yet
- Mechatronics Unit-5Document29 pagesMechatronics Unit-5nagsanthosh3No ratings yet
- ConvertersDocument54 pagesConvertersyoboiiii649No ratings yet
- Formats For Repair and MAintainance, Consumables, Equipment, Library Books-1Document14 pagesFormats For Repair and MAintainance, Consumables, Equipment, Library Books-1Pooja AshishNo ratings yet
- WK 12 FR Bode Plot Nyquist May 11,2015Document104 pagesWK 12 FR Bode Plot Nyquist May 11,2015biruk1No ratings yet
- 12422,12439,12444, 12448 Experiment No. 10: BJT Differential Amplifier O EDocument8 pages12422,12439,12444, 12448 Experiment No. 10: BJT Differential Amplifier O E5682 AatqaNo ratings yet
- 12422,12439,12444, 12448 Experiment No. 10: BJT Differential Amplifier O EDocument8 pages12422,12439,12444, 12448 Experiment No. 10: BJT Differential Amplifier O E5682 AatqaNo ratings yet
- EE31594 Quiz 4 Dec 14, 2019Document8 pagesEE31594 Quiz 4 Dec 14, 2019Hyunsog ChoiNo ratings yet
- Sampleproblems2 PDFDocument4 pagesSampleproblems2 PDFJose Martin Cisneros MandujanoNo ratings yet
- Frequency Response and Bode PlotsDocument43 pagesFrequency Response and Bode Plotszulusiphosi9No ratings yet
- Formats For Repair and MAintainance, Consumables, Equipment, Library BooksDocument14 pagesFormats For Repair and MAintainance, Consumables, Equipment, Library BooksPooja AshishNo ratings yet
- ADCsDocument15 pagesADCsEnrico LiaNo ratings yet
- Build A DC DC Convertor - Build Club ManualDocument13 pagesBuild A DC DC Convertor - Build Club ManualnelspnNo ratings yet
- Universidad Politecnica Salesiana. Laboratorio Analogica: Practica 5: Análisis de Característica de Un Diodo A SilicioDocument3 pagesUniversidad Politecnica Salesiana. Laboratorio Analogica: Practica 5: Análisis de Característica de Un Diodo A SiliciojefersonNo ratings yet
- EP50S Series: Diameter Ø50mm Shaft Type Absolute Rotary EncoderDocument5 pagesEP50S Series: Diameter Ø50mm Shaft Type Absolute Rotary EncoderEeeeeNo ratings yet
- ADDA Lecture P1Document28 pagesADDA Lecture P1MayaNo ratings yet
- Chapter 9. Controller Design: 9.2. Effect of Negative Feedback On The Network Transfer FunctionsDocument74 pagesChapter 9. Controller Design: 9.2. Effect of Negative Feedback On The Network Transfer FunctionsHoang ManhNo ratings yet
- Assignment 4Document6 pagesAssignment 4Vaidhyanadhan DeepakNo ratings yet
- Noninverting Circuit For High-To-Low Voltage Level Translation Very ImportantDocument7 pagesNoninverting Circuit For High-To-Low Voltage Level Translation Very Importantsung quekNo ratings yet
- Lab 2 Common Source Amplifier With Resistor Load and Source DegenerationDocument16 pagesLab 2 Common Source Amplifier With Resistor Load and Source DegenerationChristian Allan LumakinNo ratings yet
- Faculty of Engineering: Circuits and Signals EEL 2186 TRIMESTER 1 (2014/2015)Document7 pagesFaculty of Engineering: Circuits and Signals EEL 2186 TRIMESTER 1 (2014/2015)Rameshkumar JayaramanNo ratings yet
- ADC Test Book FinalDocument25 pagesADC Test Book FinalMohammed MohammedaliNo ratings yet
- 2.diode Clipper and ClamperDocument12 pages2.diode Clipper and ClamperMounika AllagaddaNo ratings yet
- Nte 1866Document2 pagesNte 1866flackoledzzNo ratings yet
- LC 89950Document5 pagesLC 89950nisha770No ratings yet
- Analog-To-Digital (A/D) and Digital-To-Analog (D/A) ConversionDocument15 pagesAnalog-To-Digital (A/D) and Digital-To-Analog (D/A) ConversionproteuscarrillusNo ratings yet
- Chap 8 TraDocument14 pagesChap 8 TraAndreeaNo ratings yet
- Az Displays: Specifications For Liquid Crystal DisplayDocument14 pagesAz Displays: Specifications For Liquid Crystal DisplaycarlosgnNo ratings yet
- 351 - 27435 - EE419 - 2020 - 1 - 2 - 1 - 0 3 EE419 Lec4,5 Compensation-BodeDocument39 pages351 - 27435 - EE419 - 2020 - 1 - 2 - 1 - 0 3 EE419 Lec4,5 Compensation-BodeDonna NobartNo ratings yet
- Adc Dac 2Document7 pagesAdc Dac 2sabin3sNo ratings yet
- Analog Electronics Lab ManualDocument9 pagesAnalog Electronics Lab ManualRohan KatkamNo ratings yet
- AQU4518R0: Antenna SpecificationsDocument3 pagesAQU4518R0: Antenna SpecificationsalpahNo ratings yet
- Irfb4310Zpbf Irfs4310Zpbf Irfsl4310Zpbf: V 100V R Typ. 4.8M: Max. 6.0M: I 127A C I 120ADocument11 pagesIrfb4310Zpbf Irfs4310Zpbf Irfsl4310Zpbf: V 100V R Typ. 4.8M: Max. 6.0M: I 127A C I 120ALuis FigueroaNo ratings yet
- EECS3611 Chapter1Document19 pagesEECS3611 Chapter1nickbekiaris05No ratings yet
- Week 3Document97 pagesWeek 3abbazh rakhondeNo ratings yet
- ADC0820Document22 pagesADC0820Michael PuncelNo ratings yet
- 28 - Disha BE Lab JournalDocument28 pages28 - Disha BE Lab JournalCH007No ratings yet
- Module 6Document34 pagesModule 6Debasis ChandraNo ratings yet
- Control Systems: GATE Objective & Numerical Type SolutionsDocument9 pagesControl Systems: GATE Objective & Numerical Type SolutionsAakash DewanganNo ratings yet
- VHDL AssignmentDocument2 pagesVHDL AssignmentRaja RamNo ratings yet
- Service Manual: Rmx-40 DSPDocument49 pagesService Manual: Rmx-40 DSPSándor VámosNo ratings yet
- Chenming Hu ch7 SlidesDocument43 pagesChenming Hu ch7 SlideseleenaamohapatraNo ratings yet
- Lecture38-High Speed Nyquist AdcsDocument32 pagesLecture38-High Speed Nyquist AdcsHuyBinh LeNo ratings yet
- DAC With 8051Document18 pagesDAC With 8051BharathNo ratings yet
- Ids and Net Names in The Multisim Network. Furthermore, The Use of TransientDocument3 pagesIds and Net Names in The Multisim Network. Furthermore, The Use of TransientMaxNo ratings yet
- Session 2: Practical Experiments in Phase MeasurementDocument13 pagesSession 2: Practical Experiments in Phase MeasurementMaxNo ratings yet
- Session 1: Practical Experiments On Summing Amplifiers 1.5.0 To Construct A Non-Inverting Summing AmplifierDocument11 pagesSession 1: Practical Experiments On Summing Amplifiers 1.5.0 To Construct A Non-Inverting Summing AmplifierMaxNo ratings yet
- Lab Diary TemplateDocument4 pagesLab Diary TemplateMaxNo ratings yet
- Session 1: Multisim ExperimentsDocument7 pagesSession 1: Multisim ExperimentsMaxNo ratings yet
- Cardiff School of Computer Science and Informatics: Coursework Assessment Pro-FormaDocument5 pagesCardiff School of Computer Science and Informatics: Coursework Assessment Pro-FormaMaxNo ratings yet
- Truss Report SampleDocument8 pagesTruss Report SampleMaxNo ratings yet
- Ab1 - Engieering Design 2020-21 FinalDocument3 pagesAb1 - Engieering Design 2020-21 FinalMaxNo ratings yet
- Truss With MatlabDocument2 pagesTruss With MatlabMaxNo ratings yet
- Ai WP 267Document20 pagesAi WP 267Nicu MoiseNo ratings yet
- An Assessment of Five (PANSS, SAPS, SANS, NSA-16, CGI-SCH) CommonlyDocument7 pagesAn Assessment of Five (PANSS, SAPS, SANS, NSA-16, CGI-SCH) Commonlysyarifah husna100% (1)
- Subnetting Questions 2Document11 pagesSubnetting Questions 2smzohaibabbasNo ratings yet
- Specification For Low Voltage Switchgear and Control AssembliesDocument10 pagesSpecification For Low Voltage Switchgear and Control AssembliesProfessional Trust0% (1)
- Approved Final Specification Lan ExtenderDocument13 pagesApproved Final Specification Lan ExtenderShubham KumarNo ratings yet
- Pumps and Pumping SystemsDocument88 pagesPumps and Pumping SystemssrathinakumarNo ratings yet
- Fluid Placement and Pumping StrategyDocument30 pagesFluid Placement and Pumping Strategysersa69No ratings yet
- Sample Nutritional Status Grade 7Document43 pagesSample Nutritional Status Grade 7Lu Zie NelNo ratings yet
- E 90 48Document4 pagesE 90 48Agus Qupink Luph AriaNo ratings yet
- ABB - Fuse-Links Type CEF - ENDocument12 pagesABB - Fuse-Links Type CEF - ENavegam2008No ratings yet
- Towards A Security Architecture For SubstationsDocument6 pagesTowards A Security Architecture For SubstationsSofyan AndikaNo ratings yet
- WWW - Mindbox.co - in Private and ConfidentialDocument16 pagesWWW - Mindbox.co - in Private and Confidentialgeetesh waghelaNo ratings yet
- The Role of Geosynthetics in Slope Stability: ArticleDocument11 pagesThe Role of Geosynthetics in Slope Stability: ArticleB Divya jyothiNo ratings yet
- Hvac Hvac E20 E20Document1 pageHvac Hvac E20 E20Shashank GinjupalliNo ratings yet
- H-026 Thermo. Titr. Application Note No.: Title: Determination of Caustic, Carbonate and Alumina in Bayer Process LiquorsDocument3 pagesH-026 Thermo. Titr. Application Note No.: Title: Determination of Caustic, Carbonate and Alumina in Bayer Process LiquorsRuben HernandezNo ratings yet
- 11th Class Thermodynamic Chapter Total MarksDocument2 pages11th Class Thermodynamic Chapter Total Markssiddhesh bhate100% (1)
- Weidmuller Ferrules White PaperDocument6 pagesWeidmuller Ferrules White PapertotovasiNo ratings yet
- 1.hư NG M I (AI For RA)Document11 pages1.hư NG M I (AI For RA)Thao Hoang PhuongNo ratings yet
- Fledermaus-8 5 1-DocumentationDocument562 pagesFledermaus-8 5 1-DocumentationMizta RameshNo ratings yet
- OlymphysicsDocument6 pagesOlymphysicslokiiiNo ratings yet
- NDP6060 116149Document13 pagesNDP6060 116149Alceu DluzniewskiNo ratings yet
- Spotlight Advanced Day 4 in Class Assignment Physics Que & AnswerDocument18 pagesSpotlight Advanced Day 4 in Class Assignment Physics Que & Answerazra faridiNo ratings yet
- Cambridge IGCSE™: Mathematics 0580/21 May/June 2020Document7 pagesCambridge IGCSE™: Mathematics 0580/21 May/June 2020Nicole MpehlaNo ratings yet
- Dual Sisded Shaper Machine Final EditionDocument34 pagesDual Sisded Shaper Machine Final EditionMikyas BelayNo ratings yet
- Theories About The Origin of The UniverseDocument5 pagesTheories About The Origin of The UniverseJasmine MaturanNo ratings yet
- GUIDE TO THE TRAINING OF SUPERVISORS FOR LABOUR-BASED ROAD CONSTRUCTION AND MAINTENANCE 1B09 - 888 - v2 - EnglDocument259 pagesGUIDE TO THE TRAINING OF SUPERVISORS FOR LABOUR-BASED ROAD CONSTRUCTION AND MAINTENANCE 1B09 - 888 - v2 - Englsealord001okNo ratings yet
- Cro ChordsDocument255 pagesCro ChordsDavor Posavec80% (5)
- By Alone Wolf Group: There Are Five Logical ConnectivesDocument3 pagesBy Alone Wolf Group: There Are Five Logical ConnectivesMuhammad ZeeshanNo ratings yet
- Catálogo - de - Bujias Coches - 2012-2013Document868 pagesCatálogo - de - Bujias Coches - 2012-2013argarrido123No ratings yet
- U C T M Center For Hydrogen Technology, BulgariaDocument20 pagesU C T M Center For Hydrogen Technology, BulgariaMohd Fahmi Muhammad MubarakNo ratings yet