You might also like
- Design of Bed of Lathe MachineDocument6 pagesDesign of Bed of Lathe MachineAbhay Jaswal100% (4)
- Design of Toggle JackDocument9 pagesDesign of Toggle JackKunal Ahiwale100% (2)
- Design & FEM Analysis of Scissor Jack PDFDocument32 pagesDesign & FEM Analysis of Scissor Jack PDFemba2015No ratings yet
- WholesaleProductGuide Release6Document165 pagesWholesaleProductGuide Release6panchoNo ratings yet
- Dynamic Analysis of Slider Crank MechanismsDocument14 pagesDynamic Analysis of Slider Crank MechanismssenthilNo ratings yet
- Dynamics Lab ManualDocument51 pagesDynamics Lab ManualRavindiran ChinnasamyNo ratings yet
- Design of Machinery: Chapter 1 Introduction SummaryDocument9 pagesDesign of Machinery: Chapter 1 Introduction SummaryJulianSamayoa100% (2)
- Design of Transmission SystemDocument23 pagesDesign of Transmission Systemspsurya2013100% (2)
- Design Calculation of Propeller Shaft (Landcruiser) : Abstract - The Power Transmission System Is The GreatestDocument5 pagesDesign Calculation of Propeller Shaft (Landcruiser) : Abstract - The Power Transmission System Is The GreatestDr. Aung Ko Latt100% (1)
- Gear Train ExperimentDocument8 pagesGear Train ExperimentRaza MutahirNo ratings yet
- Theory of Machines Interview Questions and AnswersDocument11 pagesTheory of Machines Interview Questions and Answerskumarmohit0203No ratings yet
- Mechanics of Machinery 2 - Balancing of Rotating MassesDocument11 pagesMechanics of Machinery 2 - Balancing of Rotating MassesAhmed Zawad ShovonNo ratings yet
- Lab Manual Engineering MechanicsDocument34 pagesLab Manual Engineering MechanicsBrajesh Kumar Sahu100% (2)
- Kom Unit 2Document24 pagesKom Unit 2Muthuvel M100% (3)
- Experiemnt 4 Screw JackDocument13 pagesExperiemnt 4 Screw JackMansoob BukhariNo ratings yet
- CH 19Document21 pagesCH 19Sanjay Kumar100% (1)
- Screw Jack Designing Project Report PDFDocument26 pagesScrew Jack Designing Project Report PDFfasil100% (1)
- Dynamic Force Analysis ProblemsDocument8 pagesDynamic Force Analysis Problemsa c s KumarNo ratings yet
- KDM 6Document54 pagesKDM 6KarthikeyanRamanujamNo ratings yet
- Displacement, Velocity and Acceleration Analysis of Plane MechanismsDocument10 pagesDisplacement, Velocity and Acceleration Analysis of Plane MechanismsHimmatSinghNo ratings yet
- DYNAMICS LAB VIVA QUESTIONS FullDocument4 pagesDYNAMICS LAB VIVA QUESTIONS FullSudipta NathNo ratings yet
- DTS-Short Questions and AnswerDocument7 pagesDTS-Short Questions and AnswerAlfred Franklin V100% (1)
- Group 12 Design of Hydraulic JackDocument45 pagesGroup 12 Design of Hydraulic JackBirhanu AsfawNo ratings yet
- Basic Mechanical Lab Manual PDFDocument60 pagesBasic Mechanical Lab Manual PDFNATIONAL XEROX0% (1)
- Full Hacksaw ReportDocument7 pagesFull Hacksaw ReportIqbalRifat0% (1)
- Scissor JackDocument9 pagesScissor JackKaushal Patel33% (3)
- Dynamics of Machinery - 2 Marks - All 5 UnitsDocument13 pagesDynamics of Machinery - 2 Marks - All 5 UnitsMohan Prasad.M58% (12)
- Gauges and Gauge DesignDocument12 pagesGauges and Gauge DesignAmir JodeyriNo ratings yet
- Automats and Tool LayoutsDocument20 pagesAutomats and Tool LayoutsAyesha IshuNo ratings yet
- Worm and Worm WheelDocument8 pagesWorm and Worm WheelMBilal MughalNo ratings yet
- Worm and Worm VheelDocument9 pagesWorm and Worm Vheelnawodani100% (2)
- Kinematic Diagrams & Degrees of FreedomDocument17 pagesKinematic Diagrams & Degrees of Freedomrezkyrivaldo94No ratings yet
- Experiment #1: Whirling of ShaftsDocument7 pagesExperiment #1: Whirling of ShaftsJibran Ansari0% (1)
- Shaping MachineDocument14 pagesShaping MachineMohammad Javed IqbalNo ratings yet
- Design of Socket and Spigot Cotter JointDocument25 pagesDesign of Socket and Spigot Cotter JointK ULAGANATHANNo ratings yet
- Belt DrivesDocument10 pagesBelt DrivesJyoti ChoudharyNo ratings yet
- Mom Lab ManualDocument77 pagesMom Lab ManualHammad SubhaniNo ratings yet
- Jimma UniversityDocument99 pagesJimma UniversityBekan NegesaNo ratings yet
- Governor ProblemsDocument3 pagesGovernor ProblemsPappuRamaSubramaniamNo ratings yet
- Static Force Analysis of Planar MechanismsDocument14 pagesStatic Force Analysis of Planar Mechanismsa c s KumarNo ratings yet
- Theory of Machines Lab Manual 10122015 030654AMDocument51 pagesTheory of Machines Lab Manual 10122015 030654AMAjay Kumar AgarwalNo ratings yet
- KOM Important QuestionsDocument12 pagesKOM Important QuestionsJithin KNo ratings yet
- Design of Transmission System Question BankDocument18 pagesDesign of Transmission System Question BankAravind50% (2)
- Vibration Lab 2 Belt Friction Lab ReportDocument15 pagesVibration Lab 2 Belt Friction Lab ReportYann YeuNo ratings yet
- Machine Design AssignmentDocument8 pagesMachine Design AssignmentSharthak GhoshNo ratings yet
- Designof14speedgearbox 170425062133Document8 pagesDesignof14speedgearbox 170425062133Muket AgmasNo ratings yet
- ME8651 Design of Transmission Systems PDFDocument83 pagesME8651 Design of Transmission Systems PDFइंडिया न्यूज़ 81100% (2)
- Lab Report (Reaction of Forces On A Simply Supported Beam)Document10 pagesLab Report (Reaction of Forces On A Simply Supported Beam)Muhammad Abubakar Shahzad Talib ShahzadNo ratings yet
- Worm Gearl Design ProjectDocument39 pagesWorm Gearl Design ProjectMajestic Egy SoldNo ratings yet
- Universal Governor AppartusDocument21 pagesUniversal Governor Appartusramniwas123No ratings yet
- Automotive Transmission - Lecture Notes Complete PDFDocument156 pagesAutomotive Transmission - Lecture Notes Complete PDFcemokszNo ratings yet
- Experiment No. 9: Aim: To Find The Mechanical Advantage, Velocity Ratio and Efficiency of Simple andDocument2 pagesExperiment No. 9: Aim: To Find The Mechanical Advantage, Velocity Ratio and Efficiency of Simple andShiva Krishna Bhagavatula50% (2)
- Reciprocating Balancing ExampleDocument15 pagesReciprocating Balancing ExampleAbhijeetKarNo ratings yet
- Design of Transmission System 2 MarksDocument3 pagesDesign of Transmission System 2 MarksMANOJ M100% (1)
- CAM and FollowerDocument13 pagesCAM and Followerpratik thakareNo ratings yet
- Experiment No 9 Load CellDocument4 pagesExperiment No 9 Load CellSagarNo ratings yet
- Experiment:04 Cam Jump Analysis: Kinematics and Dynamics Lab Manual (ME406ES)Document15 pagesExperiment:04 Cam Jump Analysis: Kinematics and Dynamics Lab Manual (ME406ES)Akshay PolasNo ratings yet
- Cam Analysis ApparatusDocument7 pagesCam Analysis ApparatusGurmeet Mehma100% (6)
- Lab Manual ME 2409Document135 pagesLab Manual ME 2409Mohit lilhoreNo ratings yet
- Dynamic Analysis of Gear Shifting MechanismDocument4 pagesDynamic Analysis of Gear Shifting MechanismMr. S. Thiyagu Asst Prof MECHNo ratings yet
- DTSDocument7 pagesDTSmithundme659No ratings yet
- Associate Fatigue Reduction in Door Installation ProcessDocument13 pagesAssociate Fatigue Reduction in Door Installation ProcessTaha AneesNo ratings yet
- Associate Fatigue Reduction at Door Installation Process: Assembly Final (Af)Document30 pagesAssociate Fatigue Reduction at Door Installation Process: Assembly Final (Af)Taha AneesNo ratings yet
- Lab Report - Theory of MachinesDocument21 pagesLab Report - Theory of MachinesTaha AneesNo ratings yet
- Departments of HACPLDocument30 pagesDepartments of HACPLTaha AneesNo ratings yet
- Project Management and Economics: Problem Based Learning AssignmentDocument8 pagesProject Management and Economics: Problem Based Learning AssignmentTaha AneesNo ratings yet
- KIA SELTOS BookingDocketDocument10 pagesKIA SELTOS BookingDocketKaustubh ShuklaNo ratings yet
- EP 1110-1-8 Vo2 PDFDocument501 pagesEP 1110-1-8 Vo2 PDFyodiumhchltNo ratings yet
- HST Assignment FAIZAN 5Document8 pagesHST Assignment FAIZAN 5patel noorNo ratings yet
- Compressor Inspection ReportDocument2 pagesCompressor Inspection ReportHussain MasoodNo ratings yet
- BAJA RULES 2020 Rev B 2020-01-26Document129 pagesBAJA RULES 2020 Rev B 2020-01-26baja100% (2)
- M111 TimingChainDocument2 pagesM111 TimingChainmongolskykunNo ratings yet
- Automatic Transmission CatalogDocument84 pagesAutomatic Transmission CatalogDmitriy TolochikNo ratings yet
- Product Profile: Hyundai I 10 CarDocument44 pagesProduct Profile: Hyundai I 10 CarRokeesharma100% (1)
- RV 250iDocument275 pagesRV 250idefikNo ratings yet
- 9780L12 Hydraulic and Pneumatic Systems Maintenance and TroubleshootingDocument29 pages9780L12 Hydraulic and Pneumatic Systems Maintenance and Troubleshootingمعلومة على الماشىNo ratings yet
- Ervice AND Arts AnualDocument74 pagesErvice AND Arts AnualMelanie GerdesNo ratings yet
- 777FDocument93 pages777FAlcanfred Cte Bto100% (6)
- Us Lube Star Marine TBN 15Document1 pageUs Lube Star Marine TBN 15Randi Riki AdtiaNo ratings yet
- Concrete Slab Load Calculation PDFDocument54 pagesConcrete Slab Load Calculation PDFEddie TaiNo ratings yet
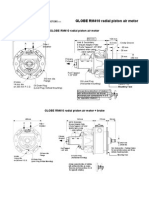
- GLOBE RM410 Radial Piston Air MotorDocument6 pagesGLOBE RM410 Radial Piston Air MotorAbdul Ghofur El AfasyNo ratings yet
- Lista Applicazioni - Application List: Bitubo & Xavi Fores With BMW S1000RR Spanish Champion 2010Document84 pagesLista Applicazioni - Application List: Bitubo & Xavi Fores With BMW S1000RR Spanish Champion 2010JoseNo ratings yet
- Hilliard Maintenance and Installation InstructionsDocument3 pagesHilliard Maintenance and Installation InstructionsTomas100% (1)
- Oil System - Servicing: Draining Filling, Flushing Replenishing Engine OilDocument7 pagesOil System - Servicing: Draining Filling, Flushing Replenishing Engine OilAre Soo YantoNo ratings yet
- Service Log TemplateDocument36 pagesService Log TemplateRoger MartinezNo ratings yet
- Kawasaki Heavy Industries, LTD.: ISO 9001 / ISO14001 CertifiedDocument10 pagesKawasaki Heavy Industries, LTD.: ISO 9001 / ISO14001 CertifiedManoj Kumar SodhaniNo ratings yet
- Pe Actros - 2015Document86 pagesPe Actros - 2015Dan RosoiuNo ratings yet
- Safety Engineering and Communication System For Autonomous Vehicles A Review, Challenges and SolutionsDocument12 pagesSafety Engineering and Communication System For Autonomous Vehicles A Review, Challenges and SolutionsIJRASETPublicationsNo ratings yet
- Lesson 6. Directional Control ValvesDocument18 pagesLesson 6. Directional Control ValvesYunah VelosoNo ratings yet
- Folga de VálvulasDocument3 pagesFolga de VálvulasTatiano BrolloNo ratings yet
- Rosenberg Fans MARAKEZ Submittal - 23Document69 pagesRosenberg Fans MARAKEZ Submittal - 23Technical OfficeNo ratings yet
- gh2020-6 AIXS PDFDocument5 pagesgh2020-6 AIXS PDFEsteban Acosta MartinezNo ratings yet
- 6975 Manual (3414)Document793 pages6975 Manual (3414)Francisco AndradeNo ratings yet
- Hydraulic Circuitry (Work Cylinders) (Monoblock Main Valve) - MT55Document3 pagesHydraulic Circuitry (Work Cylinders) (Monoblock Main Valve) - MT55Iliyan VasilevNo ratings yet
- Bobcat s570 6990681 SM 1Document1,290 pagesBobcat s570 6990681 SM 1LorenzoNo ratings yet