You might also like
- Equivalent Force Systems: This Module Aims That The Students Will Be Able ToDocument11 pagesEquivalent Force Systems: This Module Aims That The Students Will Be Able ToMONIQUE UNICO100% (1)
- Truss Dead and Live LoadDocument3 pagesTruss Dead and Live Loadeduardo aglipayNo ratings yet
- CVE 154 Lesson 3 Truncation Error and Taylor SeriesDocument31 pagesCVE 154 Lesson 3 Truncation Error and Taylor SeriesIce BoxNo ratings yet
- Engineering Mechanics (Statics) : A B A B A B BDocument2 pagesEngineering Mechanics (Statics) : A B A B A B BMallene EhurangoNo ratings yet
- Fluid MechanicsDocument8 pagesFluid Mechanicsmenma chanNo ratings yet
- Soil Structure Interaction in A Combined Pile RaftDocument22 pagesSoil Structure Interaction in A Combined Pile RaftHunny VermaNo ratings yet
- Design Example - Ordinary Connection Braced FrameDocument10 pagesDesign Example - Ordinary Connection Braced FrameCui Yao100% (1)
- CombinepdfDocument108 pagesCombinepdfAlessandra TanNo ratings yet
- Mass Transfer PartDocument29 pagesMass Transfer Partoctoviancletus100% (5)
- Thermodynamics Lesson 1-5Document43 pagesThermodynamics Lesson 1-5Cristel Shane DuranNo ratings yet
- Block Sliding With FrictionDocument49 pagesBlock Sliding With FrictiongithaNo ratings yet
- MEC 203 Mechanics of Machines Course OverviewDocument48 pagesMEC 203 Mechanics of Machines Course OverviewYuvraj Singh100% (1)
- CHE 412 - Practice ProblemsDocument1 pageCHE 412 - Practice ProblemsCarlos Miguel DacaimatNo ratings yet
- Module 00 Engineering Economics PDFDocument330 pagesModule 00 Engineering Economics PDFJON EDWARD ABAYANo ratings yet
- Fatigue of Turbine PDFDocument178 pagesFatigue of Turbine PDFimadhuryya5023No ratings yet
- Solutions To Problems in Goldstein, Classical Mechanics, Second EditionDocument70 pagesSolutions To Problems in Goldstein, Classical Mechanics, Second Editiongitanoelrengo87% (15)
- Engg Mech ExamsDocument5 pagesEngg Mech Examsnoli90No ratings yet
- Theorem PappusDocument59 pagesTheorem PappusArijit SantraNo ratings yet
- CE Review Advanced MathematicsDocument2 pagesCE Review Advanced MathematicsRAYNo ratings yet
- SOM Lecture 03Document25 pagesSOM Lecture 03tvkbhanuprakashNo ratings yet
- Fluid Mechanics HydraulicsDocument420 pagesFluid Mechanics Hydraulicsanonymousdi3noNo ratings yet
- Activity 1 - Group 1Document5 pagesActivity 1 - Group 1Kim OpenaNo ratings yet
- ESAS - Sample Problems in Statics and MechanicsDocument3 pagesESAS - Sample Problems in Statics and MechanicsKYLE LEIGHZANDER VICENTE100% (1)
- Question: A Cube 2.2 FT On An Edge Has Its Lower Half of S 1.6 and UpperDocument1 pageQuestion: A Cube 2.2 FT On An Edge Has Its Lower Half of S 1.6 and UpperLi ReNo ratings yet
- CURVILINEAR MOTION PROJECTILESDocument6 pagesCURVILINEAR MOTION PROJECTILESPauline CreoNo ratings yet
- 9 - Flanged Bolt CouplingDocument15 pages9 - Flanged Bolt CouplingPatrick Antonio Orge ChingNo ratings yet
- Chapter 2 ANNUITIESDocument21 pagesChapter 2 ANNUITIESCarl Omar GobangcoNo ratings yet
- Chapter 3 - The Time Value of Money (Part I)Document20 pagesChapter 3 - The Time Value of Money (Part I)Arin ParkNo ratings yet
- BernaulliDocument6 pagesBernaulliCamille SemillaNo ratings yet
- Projected Area of Rivet Hole: B 140 MN M N MDocument16 pagesProjected Area of Rivet Hole: B 140 MN M N MLeonesa Ananias LausNo ratings yet
- MEEN 20052 - Week 2 - Salamat, Andre Agassi D.Document4 pagesMEEN 20052 - Week 2 - Salamat, Andre Agassi D.andreagassiNo ratings yet
- Mechanics (Dynamics)Document2 pagesMechanics (Dynamics)Earl JennNo ratings yet
- Design 05Document24 pagesDesign 05botomesa69No ratings yet
- AdmathDocument8 pagesAdmathPhilip ArpiaNo ratings yet
- Measuring Densities and Specific Gravities Using a Hydrometer and ManometerDocument5 pagesMeasuring Densities and Specific Gravities Using a Hydrometer and ManometerReinier Roman SantosNo ratings yet
- FMECH Finals Plate 2018Document1 pageFMECH Finals Plate 2018Jessa San Pedro100% (1)
- Equilibrium of Particles ChapterDocument6 pagesEquilibrium of Particles ChapterRhey LuceroNo ratings yet
- Hw#2 Trigonometry Board Problems 1Document8 pagesHw#2 Trigonometry Board Problems 1mr.bagssy loopNo ratings yet
- Conical Vessel Water Volume CalculationDocument6 pagesConical Vessel Water Volume CalculationFritzie LanternaNo ratings yet
- Quiz 1 With KTCDocument6 pagesQuiz 1 With KTCacurvz2005100% (1)
- 1.2 Thin-Walled Pressure VesselsDocument4 pages1.2 Thin-Walled Pressure VesselsCla OrillazaNo ratings yet
- SI vs CI Engines Key DifferencesDocument4 pagesSI vs CI Engines Key DifferencesRicci ObiasNo ratings yet
- PROBLEM 2.93: SolutionDocument41 pagesPROBLEM 2.93: SolutionCharbel Abou KhalilNo ratings yet
- Chapter 01Document2 pagesChapter 01TengGabzNo ratings yet
- 39Document1 page39Edbert TulipasNo ratings yet
- MEC103 Mechanics of Deformable BodiesDocument24 pagesMEC103 Mechanics of Deformable BodiesLorene Ropeta.No ratings yet
- Problem Set in Strength of MaterialsDocument30 pagesProblem Set in Strength of MaterialsHueyNo ratings yet
- Statics AnDocument13 pagesStatics AnIsaac Davy100% (1)
- ENSC 3233 HW #1 Solution PDFDocument10 pagesENSC 3233 HW #1 Solution PDFheem bashaNo ratings yet
- Surveying WORKSHEET 8bDocument2 pagesSurveying WORKSHEET 8bReyy ArbolerasNo ratings yet
- Plate No.2 DynamicsDocument3 pagesPlate No.2 DynamicsEunice CorreaNo ratings yet
- Ce234 Topic 09-10Document58 pagesCe234 Topic 09-10Nicholas Bonn SingNo ratings yet
- Take Home ExamDocument2 pagesTake Home ExamArnab Chakraborty100% (1)
- Chapter 2 SolutionsDocument9 pagesChapter 2 SolutionsFrendick LegaspiNo ratings yet
- Helical Springs and Shear and Moment DiagramDocument25 pagesHelical Springs and Shear and Moment DiagramPoncelito KachupoyNo ratings yet
- Module 5 Act 2 (Thermo)Document2 pagesModule 5 Act 2 (Thermo)Stephen VisperasNo ratings yet
- Polytechnic University of The Philippines: ENSC 20043 Statics of Rigid Bodies Quiz 2Document3 pagesPolytechnic University of The Philippines: ENSC 20043 Statics of Rigid Bodies Quiz 2acurvz2005No ratings yet
- Properties of Fluids: 1.1. Fluid Mechanics and HydraulicsDocument16 pagesProperties of Fluids: 1.1. Fluid Mechanics and HydraulicsJoshua FactorNo ratings yet
- Angle of Friction, Wedges & ScrewsDocument2 pagesAngle of Friction, Wedges & ScrewsJessica De GuzmanNo ratings yet
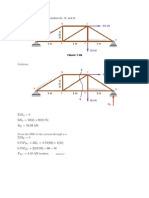
- Solution:: 1. Determine The Force in Members BC, CE, and EFDocument9 pagesSolution:: 1. Determine The Force in Members BC, CE, and EFEbru Önlü DuralNo ratings yet
- Engg Mechanics QuestionnaireDocument15 pagesEngg Mechanics Questionnaireacurvz2005No ratings yet
- Centroid of a Rectangular AreaDocument83 pagesCentroid of a Rectangular AreaSaptarshiDuttaNo ratings yet
- Engineering Economics - SolutionsDocument11 pagesEngineering Economics - SolutionsIssacus Youssouf100% (1)
- Force F, Which Is Actually The Resultant of A Great Number of Forces Acting OverDocument6 pagesForce F, Which Is Actually The Resultant of A Great Number of Forces Acting Overkrunal07786No ratings yet
- Topic 1 (Introduction and Friction) Part 1Document21 pagesTopic 1 (Introduction and Friction) Part 1Brix DavidNo ratings yet
- ENGG 406 - Module 3 - Planning or Coordinating Technical ActivitiesDocument40 pagesENGG 406 - Module 3 - Planning or Coordinating Technical ActivitiesMonique UnicoNo ratings yet
- ENGG 406 - Module 1 - Introduction To Engineering ManagementDocument22 pagesENGG 406 - Module 1 - Introduction To Engineering ManagementMonique UnicoNo ratings yet
- Laboratory Report No. 4 - UnicoDocument7 pagesLaboratory Report No. 4 - UnicoMonique UnicoNo ratings yet
- UnicoDocument1 pageUnicoMonique UnicoNo ratings yet
- 45 SumRecDocument5 pages45 SumRecMonique UnicoNo ratings yet
- Module 5Document12 pagesModule 5Monique UnicoNo ratings yet
- ENGG 406 - Organizing Technical ActivitiesDocument29 pagesENGG 406 - Organizing Technical ActivitiesMonique UnicoNo ratings yet
- ENGG 406 - Module 2 - Decision MakingDocument20 pagesENGG 406 - Module 2 - Decision MakingMonique UnicoNo ratings yet
- Equilibrium: This Module Aims That The Students Will Be Able ToDocument12 pagesEquilibrium: This Module Aims That The Students Will Be Able ToMonique UnicoNo ratings yet
- Design and Analysis of Skid Frame For Pumping StationDocument6 pagesDesign and Analysis of Skid Frame For Pumping StationtizioNo ratings yet
- Design of Cotter JointDocument15 pagesDesign of Cotter JointKetanJShah100% (1)
- Projectile Motion Worksheet Ans KeyDocument6 pagesProjectile Motion Worksheet Ans KeyFrengky WijayaNo ratings yet
- 01 - Class Test (TAPS) - EngDocument3 pages01 - Class Test (TAPS) - EngUtkarsh AgrawalNo ratings yet
- ME5302 assignment 1 solutionsDocument2 pagesME5302 assignment 1 solutionsIjaz FazilNo ratings yet
- 3 Hinged ArchsDocument9 pages3 Hinged ArchsFi FaNo ratings yet
- Ocean Propagation Models PDFDocument39 pagesOcean Propagation Models PDFkumargpalaniNo ratings yet
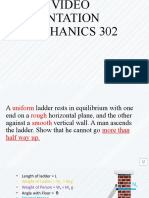
- Video Presentation Mechanics 302Document7 pagesVideo Presentation Mechanics 302hamza buttNo ratings yet
- Formulation For Thermo Hydro Mechanical Problems in Porous MediaDocument64 pagesFormulation For Thermo Hydro Mechanical Problems in Porous MediaAlexandros GiNo ratings yet
- Hake ViscoTester VT550Document6 pagesHake ViscoTester VT550Jiral PatelNo ratings yet
- Introduction of Random VibrationDocument10 pagesIntroduction of Random VibrationSagar PatelNo ratings yet
- HW3 SolutionsDocument15 pagesHW3 Solutionsellie<3100% (1)
- ASTM E 388 - 2003 - Standard Test Method of Sharp-Notch Tension Testing of High-Strength Sheet MaterialsDocument6 pagesASTM E 388 - 2003 - Standard Test Method of Sharp-Notch Tension Testing of High-Strength Sheet MaterialsPatricio G. ArrienNo ratings yet
- Impack of JetDocument13 pagesImpack of JetKevin Devastian100% (1)
- 3D Plane Stresses and Strains - QProducersDocument14 pages3D Plane Stresses and Strains - QProducersvickywce JadhavNo ratings yet
- Velocity, Distance & Acceleration 2 QPDocument10 pagesVelocity, Distance & Acceleration 2 QPMisc VidsNo ratings yet
- MR FluidDocument5 pagesMR FluidNithin GowdaNo ratings yet
- CLUTCHES All DetailsDocument36 pagesCLUTCHES All DetailsArunavNo ratings yet
- Jest QuestionDocument16 pagesJest QuestionThirumugam SNo ratings yet
- Seismic Upgrade of An Intake Tower Using Underwater Base Isolation, Preliminary Design Vancouver Island, CanadaDocument8 pagesSeismic Upgrade of An Intake Tower Using Underwater Base Isolation, Preliminary Design Vancouver Island, CanadaSakisNo ratings yet
- 6.4 Stresses in Welded Joints in BendingDocument19 pages6.4 Stresses in Welded Joints in BendingAhmed SalehNo ratings yet
- CES2104 Lecture 1 - Introduction To Statics PDFDocument23 pagesCES2104 Lecture 1 - Introduction To Statics PDFCarlitos AdarnaNo ratings yet
- Hong Kong Physics Olympiad 2011 Secondary Written ExamDocument10 pagesHong Kong Physics Olympiad 2011 Secondary Written ExamMichael LeungNo ratings yet
- Motox WormDocument34 pagesMotox WormCristianDuarteNo ratings yet