You might also like
- 2semi-Dlp SCIENCE 8 W6Document5 pages2semi-Dlp SCIENCE 8 W6Lovely Grace GarvezNo ratings yet
- Coast Artillery Journal - Jun 1944Document100 pagesCoast Artillery Journal - Jun 1944CAP History Library100% (1)
- Mathematics 8 Curriculum MapDocument19 pagesMathematics 8 Curriculum Mapapril joy makilanNo ratings yet
- WEEK12-JHSDocument5 pagesWEEK12-JHSJOLITA INWAY LISBOGNo ratings yet
- Aug 7-11Document61 pagesAug 7-11Ma Kristyl Rain SagotNo ratings yet
- Unit Curriculum Map - Math8 First QuarterDocument5 pagesUnit Curriculum Map - Math8 First QuarterJake Lester W. SasabanNo ratings yet
- Lesson Plan Ist Semester 2016-17Document9 pagesLesson Plan Ist Semester 2016-17Saniya PaulNo ratings yet
- Year 6 Parent Curriculum Plan Spring 2018Document2 pagesYear 6 Parent Curriculum Plan Spring 2018Anonymous z6TIpq6elNo ratings yet
- MATHEMATICS 8 Curriculum MapDocument19 pagesMATHEMATICS 8 Curriculum Mapcrizelle91% (11)
- Aurora Pioneers Memorial College: (Cebuano Barracks Institute)Document4 pagesAurora Pioneers Memorial College: (Cebuano Barracks Institute)Hassel AbayonNo ratings yet
- Curriculum Map for Math 8 at South City College Junior HighDocument19 pagesCurriculum Map for Math 8 at South City College Junior HighJoseph Cayetano MuñezNo ratings yet
- Curriculum Map For Mathematics 9: Adiong Memorial College Foundation, IncDocument5 pagesCurriculum Map For Mathematics 9: Adiong Memorial College Foundation, IncNoraisa MacabaasNo ratings yet
- G8DLL Q2W2 LC24-25Document15 pagesG8DLL Q2W2 LC24-25Joy Ann Molina Antonio100% (1)
- Assignment 1Document41 pagesAssignment 1api-321145960No ratings yet
- WHL Quarter 1 Week 2Document3 pagesWHL Quarter 1 Week 2Claudz EstorcoNo ratings yet
- Cur Map Math 8 '20Document16 pagesCur Map Math 8 '20Lany T. CataminNo ratings yet
- Math 9 - Curriculum Map - 2021-2022 - 2Document4 pagesMath 9 - Curriculum Map - 2021-2022 - 2Hassel Abayon100% (1)
- Coast Guard Navik GD SyllabusDocument2 pagesCoast Guard Navik GD Syllabusrahulchaudhary5767No ratings yet
- Guide To Math Needed To Study String TheoryDocument7 pagesGuide To Math Needed To Study String TheoryAshwin Balaji100% (1)
- 4TH Quarter Unit Assessment Map - Math 8Document4 pages4TH Quarter Unit Assessment Map - Math 8Nolzkie CalisoNo ratings yet
- Fdocuments - in Introduction To The Theory of Fuzzy Subsets Vol 1 A KaufmannDocument2 pagesFdocuments - in Introduction To The Theory of Fuzzy Subsets Vol 1 A KaufmannSangeethaNo ratings yet
- Cmap 8Document3 pagesCmap 8michaelNo ratings yet
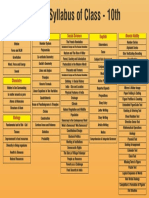
- Class 10th syllabus overview of major subjectsDocument1 pageClass 10th syllabus overview of major subjectsjee lfefeNo ratings yet
- 2ND Math 10 - Curriculum MapDocument14 pages2ND Math 10 - Curriculum MapErlinda Lingayo-EstradaNo ratings yet
- DLL Earth and Life CompleteDocument65 pagesDLL Earth and Life CompleteRiza marie ConcepcionNo ratings yet
- Sample Curriculum Map (Science 10)Document7 pagesSample Curriculum Map (Science 10)Rose HeyNo ratings yet
- GREEN GRACE MID TERM REPORT CARDSDocument3 pagesGREEN GRACE MID TERM REPORT CARDSKISAKYE ANTHONYNo ratings yet
- Curriculum Map Math 8Document20 pagesCurriculum Map Math 8Eliza Antolin CortadoNo ratings yet
- Cmap Math 9Document5 pagesCmap Math 9michaelNo ratings yet
- Description of Site and LearnersDocument11 pagesDescription of Site and LearnerskellieouztsNo ratings yet
- Daily Lesson Log Science 8 Week 1 Quarter 2Document4 pagesDaily Lesson Log Science 8 Week 1 Quarter 2Almera CabogoNo ratings yet
- CM 3rd Quarter MATHDocument9 pagesCM 3rd Quarter MATHAngelica NacisNo ratings yet
- M.SC Syllabus Xyz (MATHS)Document18 pagesM.SC Syllabus Xyz (MATHS)Ldrago TerrorincarnatedNo ratings yet
- GRADES 1 To 12 Daily Lesson Log Lunes Martes Miyerkules Huwebes BiyernesDocument5 pagesGRADES 1 To 12 Daily Lesson Log Lunes Martes Miyerkules Huwebes BiyernesAshleyPottxz Labxz ÜNo ratings yet
- Curriculum Map S.Y 2019 - 2020: St. Francis Xavier Academy of Kapatagan IncDocument7 pagesCurriculum Map S.Y 2019 - 2020: St. Francis Xavier Academy of Kapatagan Incjoan niniNo ratings yet
- The Learners Demonstrate Understanding Of... : B. Other Learning Resources Iv. ProceduresDocument3 pagesThe Learners Demonstrate Understanding Of... : B. Other Learning Resources Iv. ProceduresIan Kristian MulayNo ratings yet
- Daily lesson log SEO science circuits series parallelDocument12 pagesDaily lesson log SEO science circuits series parallelFatima SacramentoNo ratings yet
- M.Sc. Mathematics Syllabus for Govt. Bilasa Girls' CollegeDocument26 pagesM.Sc. Mathematics Syllabus for Govt. Bilasa Girls' CollegeViswas Kumar JhaNo ratings yet
- Secondary-School Mathematics v1Document196 pagesSecondary-School Mathematics v1René WesterNo ratings yet
- Grade 8 Math Curriculum MapDocument9 pagesGrade 8 Math Curriculum MapMohammad Saide Langco100% (2)
- Class 9 PDFDocument16 pagesClass 9 PDFMayank GoyalNo ratings yet
- The Learners Demonstrate Understanding Of... : B. Other Learning Resources Iv. ProceduresDocument3 pagesThe Learners Demonstrate Understanding Of... : B. Other Learning Resources Iv. ProceduresIan Kristian MulayNo ratings yet
- Engineering Maths 3 and Engineering Maths 4Document2 pagesEngineering Maths 3 and Engineering Maths 4nandakishor keysNo ratings yet
- Serial No. Course Code Course Name Syllabus Prerequisites Credits Professor Suggested Books Others Other PrerequisitesDocument1 pageSerial No. Course Code Course Name Syllabus Prerequisites Credits Professor Suggested Books Others Other PrerequisitesSujit reddyNo ratings yet
- DLL in Science 10 (Week 4)Document4 pagesDLL in Science 10 (Week 4)Lhester D. AntolinNo ratings yet
- Q1 Week 4Document8 pagesQ1 Week 4ROSELYN BARACUSONo ratings yet
- Sci 8-Cmap-IstquarterDocument8 pagesSci 8-Cmap-IstquarterMarcial CruzNo ratings yet
- English in Electronics and TelecommunicationsDocument57 pagesEnglish in Electronics and TelecommunicationsHue TranNo ratings yet
- 1st Week of AugustDocument3 pages1st Week of AugustVanessa Pangan KellerNo ratings yet
- Wang 2012Document15 pagesWang 2012Qamar Abbas 189No ratings yet
- B.sc. (Mathematics) PDFDocument34 pagesB.sc. (Mathematics) PDFLalit VermaNo ratings yet
- Curriculum MapDocument16 pagesCurriculum MapCris John AgpalzaNo ratings yet
- Daily Lesson LogDocument4 pagesDaily Lesson LogKim Laura CalicdanNo ratings yet
- BSC MathematicsDocument14 pagesBSC MathematicsPrashant SharmaNo ratings yet
- Class 10th Syllabus For Offline Test Series RajasthanDocument1 pageClass 10th Syllabus For Offline Test Series RajasthanJay AmetaNo ratings yet
- 2010 Some Classical Properties of The Non-Abelian Yang-Mills TheoriesDocument5 pages2010 Some Classical Properties of The Non-Abelian Yang-Mills TheoriesantosanNo ratings yet
- DLL - Mapeh 1 - Q1 - W8Document5 pagesDLL - Mapeh 1 - Q1 - W8Mary Anne PabloNo ratings yet
- JHS-WEEK-9Document5 pagesJHS-WEEK-9JOLITA INWAY LISBOGNo ratings yet
- Warm Up Lesson Presentation Lesson QuizDocument33 pagesWarm Up Lesson Presentation Lesson QuizNestthe CasidsidNo ratings yet
- Linear Algebra Activity 1 SimplificationDocument3 pagesLinear Algebra Activity 1 SimplificationNestthe CasidsidNo ratings yet
- Enrollment As of June 11, 2018: Poblacion Polomolok National High SchoolDocument1 pageEnrollment As of June 11, 2018: Poblacion Polomolok National High SchoolNestthe CasidsidNo ratings yet
- Math 4th Periodical g10Document1 pageMath 4th Periodical g10Nestthe CasidsidNo ratings yet
- Activity 1 Edmath 300Document3 pagesActivity 1 Edmath 300Nestthe CasidsidNo ratings yet
- Ten Runners Join A Race. in How Many Possible Ways Can They Be Arranged As First, Second, and Third Placers?Document12 pagesTen Runners Join A Race. in How Many Possible Ways Can They Be Arranged As First, Second, and Third Placers?Nestthe CasidsidNo ratings yet
- 1 Market EconomiesDocument80 pages1 Market EconomiesNestthe CasidsidNo ratings yet
- Trigonometric Ratios ExplainedDocument30 pagesTrigonometric Ratios ExplainedNestthe CasidsidNo ratings yet
- Grade 7 Grade 8: Enrolled in LIS Enrolled in LISDocument1 pageGrade 7 Grade 8: Enrolled in LIS Enrolled in LISNestthe CasidsidNo ratings yet
- Feasibility ReportDocument3 pagesFeasibility ReportNestthe CasidsidNo ratings yet
- A Polynomials and Factoring2Document46 pagesA Polynomials and Factoring2Nestthe CasidsidNo ratings yet
- Ten Runners Join A Race. in How Many Possible Ways Can They Be Arranged As First, Second, and Third Placers?Document12 pagesTen Runners Join A Race. in How Many Possible Ways Can They Be Arranged As First, Second, and Third Placers?Nestthe CasidsidNo ratings yet
- AbstractDocument1 pageAbstractnestthe15No ratings yet
- Chapter IDocument2 pagesChapter INestthe CasidsidNo ratings yet
- Final Paper - G ConcepcionDocument23 pagesFinal Paper - G ConcepcionNestthe CasidsidNo ratings yet
- Mendelian Problems AdvDocument13 pagesMendelian Problems AdvAna AnkovicNo ratings yet
- DCP ManualDocument58 pagesDCP ManualNestthe CasidsidNo ratings yet
- Short StoryDocument3 pagesShort StoryNestthe CasidsidNo ratings yet
- AbstractDocument1 pageAbstractnestthe15No ratings yet
- The Raven, E.A. PoeDocument3 pagesThe Raven, E.A. PoeAleksandar CiricNo ratings yet
- Pearl of the Orient Seas HistoryDocument17 pagesPearl of the Orient Seas HistoryNestthe CasidsidNo ratings yet
- Mindanao State UniversityDocument1 pageMindanao State UniversityNestthe CasidsidNo ratings yet
- Short StoryDocument3 pagesShort StoryNestthe CasidsidNo ratings yet
- Understanding by Design: NESD Model For Curriculum ImplementationDocument11 pagesUnderstanding by Design: NESD Model For Curriculum ImplementationNestthe CasidsidNo ratings yet
- Reseach Paper Koi.!22Document20 pagesReseach Paper Koi.!22Nestthe CasidsidNo ratings yet
- Course Description For Business CommunicationDocument4 pagesCourse Description For Business CommunicationNestthe CasidsidNo ratings yet
- Winners of the Palanca Awards for Literature 1990-2000Document2 pagesWinners of the Palanca Awards for Literature 1990-2000Nestthe CasidsidNo ratings yet
- Lecture20 PDFDocument20 pagesLecture20 PDFkhitab12No ratings yet
- Mtmtipmbprima30gb 091020035130 Phpapp01Document49 pagesMtmtipmbprima30gb 091020035130 Phpapp01Udo Iheanacho100% (4)
- Payroll Calculator SpreadsheetDocument7 pagesPayroll Calculator SpreadsheetbagumbayanNo ratings yet
- Introduction To Tel-X-Ometer Equipment-Manual ProcedureDocument7 pagesIntroduction To Tel-X-Ometer Equipment-Manual ProcedurehannaNo ratings yet
- Mb181Tc Idtv: Service ManualDocument58 pagesMb181Tc Idtv: Service Manualevas100% (1)
- HTML (Web Technology)Document59 pagesHTML (Web Technology)D-sumanNo ratings yet
- Appendix ADocument13 pagesAppendix Ajuha04No ratings yet
- Company Wise Data Science Interview QuestionsDocument39 pagesCompany Wise Data Science Interview QuestionschaddiNo ratings yet
- Slot RecoveryDocument49 pagesSlot RecoveryIslam MazeedNo ratings yet
- Effect of Enriched Moina and Microparticulate Diet On Fatty AcidDocument6 pagesEffect of Enriched Moina and Microparticulate Diet On Fatty AcidJournal of Environment and Bio-SciencesNo ratings yet
- Block chain secures IoT dataDocument10 pagesBlock chain secures IoT datashravan amudalaNo ratings yet
- Domekt CF 400 V C6M ENDocument1 pageDomekt CF 400 V C6M ENnpnickNo ratings yet
- SAP BW ExtractionDocument161 pagesSAP BW ExtractionKuldeep Jain100% (3)
- Fe-C Phase Transformations and Hardening of SteelDocument21 pagesFe-C Phase Transformations and Hardening of SteelchenshicatherineNo ratings yet
- DISOCONT® Tersus Weighfeeder Instruction Manual bvh2407gbDocument338 pagesDISOCONT® Tersus Weighfeeder Instruction Manual bvh2407gbMizi KoNo ratings yet
- TEAC MP-200-512 - User ManualDocument28 pagesTEAC MP-200-512 - User ManualtiponatisNo ratings yet
- Chapter 3 Musculoskeletal System Part 1Document55 pagesChapter 3 Musculoskeletal System Part 1kamalab04No ratings yet
- Nuclear Physics QuestionsDocument29 pagesNuclear Physics Questionsjorsen93No ratings yet
- Sequencing Catalog SupplementDocument10 pagesSequencing Catalog SupplementhassamjNo ratings yet
- Good Practice Guide For Form and Diameter Measurements For Large ShaftsDocument14 pagesGood Practice Guide For Form and Diameter Measurements For Large ShaftsNg Wei LihNo ratings yet
- Chapter 3b - MP DSBDocument32 pagesChapter 3b - MP DSBsheham ihjamNo ratings yet
- Corrosion and Protection of Submarine Metal Components in SeawaterDocument4 pagesCorrosion and Protection of Submarine Metal Components in SeawaterSamuel GarciaNo ratings yet
- SOLO/UNISON/POLY/Octave Shift/Portamento: Settings Panel DescriptionsDocument1 pageSOLO/UNISON/POLY/Octave Shift/Portamento: Settings Panel Descriptionsanon_713757213No ratings yet
- Review 1Document11 pagesReview 1Anonymous gfbLDQPgNo ratings yet
- Vacon NX OPTCP Profinet IO Board User Manual DPD00Document44 pagesVacon NX OPTCP Profinet IO Board User Manual DPD00TanuTiganuNo ratings yet
- Add Maths S.B.A.Document13 pagesAdd Maths S.B.A.Samuel Haynes80% (5)
- Controlled Atmosphere StorageDocument9 pagesControlled Atmosphere StorageAnaniah BlessingNo ratings yet
- Vision Plus NotesDocument3 pagesVision Plus NotesPraveen KrishnaNo ratings yet
- Renewable and Sustainable Energy ReviewsDocument13 pagesRenewable and Sustainable Energy ReviewsMohammadreza MalekMohamadiNo ratings yet
- Exocytosis and Endocytosis: © 2012 Pearson Education, IncDocument49 pagesExocytosis and Endocytosis: © 2012 Pearson Education, IncGlein CenizaNo ratings yet