You might also like
- Electrical and Electronic Principles 3 Checkbook: The Checkbook SeriesFrom EverandElectrical and Electronic Principles 3 Checkbook: The Checkbook SeriesNo ratings yet
- A DQ Synchronous Reference Frame Control For Single-Phase ConvertersDocument5 pagesA DQ Synchronous Reference Frame Control For Single-Phase ConvertersRanimSaifNo ratings yet
- Handbook of Power Systems Engineering with Power Electronics ApplicationsFrom EverandHandbook of Power Systems Engineering with Power Electronics ApplicationsNo ratings yet
- Paper 1Document9 pagesPaper 1headerwebNo ratings yet
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)From EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)No ratings yet
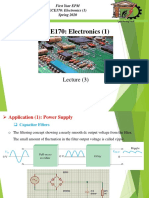
- ECE170: Electronics (1) : LectureDocument40 pagesECE170: Electronics (1) : LectureKhaled MohamedNo ratings yet
- Of Loop AC: Design Feedback in Unity Power Factor To DC ConverterDocument9 pagesOf Loop AC: Design Feedback in Unity Power Factor To DC ConverterEjaz AhmedNo ratings yet
- RectifierDocument53 pagesRectifierYogi Bekti P100% (1)
- RectifiersDocument51 pagesRectifiersfa21-bee-015100% (1)
- SMC BDC ConvertersDocument10 pagesSMC BDC ConvertersJakdaksh HarshNo ratings yet
- Flyback PDFDocument11 pagesFlyback PDFlucianoNo ratings yet
- EE201L Lab Report 5Document5 pagesEE201L Lab Report 5خہٰہٰالہٰد ۦ' ۦ'No ratings yet
- Series RC Circuit: Electrical and Electronic EngineeringDocument6 pagesSeries RC Circuit: Electrical and Electronic Engineeringخہٰہٰالہٰد ۦ' ۦ'No ratings yet
- Alberto Soto Lock Edison R. Da Silva Malik E. Elbuluk Darlan A. FernandesDocument7 pagesAlberto Soto Lock Edison R. Da Silva Malik E. Elbuluk Darlan A. FernandesOnur CanNo ratings yet
- A New Current-Mode Squarer Circuit For RMS-to-DC Converter: ISO 9001:2008 CertifiedDocument4 pagesA New Current-Mode Squarer Circuit For RMS-to-DC Converter: ISO 9001:2008 Certifiedarsham1No ratings yet
- Nonlinear Control of Boost Ac DC ConvertDocument6 pagesNonlinear Control of Boost Ac DC Convertfh51lv4No ratings yet
- GATE (1991-2010) Solved Papers EEDocument261 pagesGATE (1991-2010) Solved Papers EEqwer0% (1)
- Power Control For A Doubly Fed Induction Generator: Authors Ali Boukhriss, Tamou Nasser, Ahmed EssadkiDocument5 pagesPower Control For A Doubly Fed Induction Generator: Authors Ali Boukhriss, Tamou Nasser, Ahmed EssadkiAbab AliNo ratings yet
- N InvertersDocument8 pagesN InvertersSaurabh SinghNo ratings yet
- M.g.say ch01Document5 pagesM.g.say ch01prabhjot singh150% (2)
- Control Upfc PDFDocument9 pagesControl Upfc PDFChaibHabibNo ratings yet
- Investigation of A Unified Power Flow Controller: AbstractDocument9 pagesInvestigation of A Unified Power Flow Controller: AbstractChaibHabibNo ratings yet
- Ioc DT P 2004 22Document14 pagesIoc DT P 2004 22api-27199346No ratings yet
- Presentation Paper On DGDocument5 pagesPresentation Paper On DGAlok Bikash SadangiNo ratings yet
- (2001) Ebook - Electronics and Circuit Analysis Using Matlab - Theory - DiodesDocument41 pages(2001) Ebook - Electronics and Circuit Analysis Using Matlab - Theory - DiodeselfrichNo ratings yet
- Polozec, Cockcroft-Walton Voltage Multiplier, Nov. 2016, 10.13140RG.2.2.35788.82564Document9 pagesPolozec, Cockcroft-Walton Voltage Multiplier, Nov. 2016, 10.13140RG.2.2.35788.82564Denis JaissonNo ratings yet
- Assignmnet 02 RevisedDocument3 pagesAssignmnet 02 RevisedBilal Ayub100% (1)
- Baek 2011Document6 pagesBaek 2011Will TedjoNo ratings yet
- Symmetrical Fault Detection of Distance Relay To Prevent Cascade Tripping During Power SwingDocument6 pagesSymmetrical Fault Detection of Distance Relay To Prevent Cascade Tripping During Power SwingFabien CallodNo ratings yet
- Application of The Dq0 Transformation in The 3 Phase Grid Connected PV Systems With Active and Reactive Power Control 04746965Document6 pagesApplication of The Dq0 Transformation in The 3 Phase Grid Connected PV Systems With Active and Reactive Power Control 04746965new7677100% (1)
- Paper 2 - PEL20120014 - 2ndDocument5 pagesPaper 2 - PEL20120014 - 2ndSherif M. DabourNo ratings yet
- 2002 15 PDFDocument7 pages2002 15 PDFGIngaaNo ratings yet
- EE419 Assignment 2022.: Harry - Beggy2@mail - Dcu.ieDocument27 pagesEE419 Assignment 2022.: Harry - Beggy2@mail - Dcu.ieHarry BeggyNo ratings yet
- GATE EE 2007 With SolutionsDocument62 pagesGATE EE 2007 With SolutionsAbhishek MohanNo ratings yet
- On Identification of Synchronous Machine Parameters Using DC Decay TestDocument5 pagesOn Identification of Synchronous Machine Parameters Using DC Decay TestmcrahanNo ratings yet
- T S Ia SDocument7 pagesT S Ia S1nshsankritNo ratings yet
- Assignment 1Document2 pagesAssignment 1bandinikhil99No ratings yet
- Applying To Control Overcurrents at Unbalanced Faults of Forced-Commutated Vscs Used As Static Var CompensatorsDocument6 pagesApplying To Control Overcurrents at Unbalanced Faults of Forced-Commutated Vscs Used As Static Var CompensatorsJULFANRI SIRAITNo ratings yet
- Ram6n: Sliding Mode Controller For The Boost InverterDocument6 pagesRam6n: Sliding Mode Controller For The Boost InverterskrtamilNo ratings yet
- Review of Power Electronics-Chapter - 6Document17 pagesReview of Power Electronics-Chapter - 6ee mce dataNo ratings yet
- Q.1 To Q.20 Carry One Mark Each: 5 Rad/s, 2.38 0.667Document23 pagesQ.1 To Q.20 Carry One Mark Each: 5 Rad/s, 2.38 0.667Pawan ChandaniNo ratings yet
- Chapter 2 - Part 3: Isolated ConverterDocument28 pagesChapter 2 - Part 3: Isolated ConverterWeehao SiowNo ratings yet
- Adaptive Voltage PositioningDocument7 pagesAdaptive Voltage PositioningadolfNo ratings yet
- PPTPRITYDocument27 pagesPPTPRITYPrity kumariNo ratings yet
- Research PaperDocument7 pagesResearch PaperAjmal FarooqNo ratings yet
- SMPS Simulation Sheet 2023Document7 pagesSMPS Simulation Sheet 2023yaaNo ratings yet
- Experiment No-10 Title: Direct-Quadrature-Zero (dq0) TransformationDocument6 pagesExperiment No-10 Title: Direct-Quadrature-Zero (dq0) TransformationKhushal JirapureNo ratings yet
- A Novel Statcom With Energy Storage ForDocument11 pagesA Novel Statcom With Energy Storage ForSushil PaudelNo ratings yet
- Averaged Switch Modeling,: AC Equivalent Circuit ModelingDocument12 pagesAveraged Switch Modeling,: AC Equivalent Circuit ModelingJulián RincónNo ratings yet
- Report Part 3Document22 pagesReport Part 3Anonymous FlikAMNo ratings yet
- Load Network Design Technique For Switched-Mode Tuned Class E Power AmplifiersDocument23 pagesLoad Network Design Technique For Switched-Mode Tuned Class E Power AmplifiersJong-RyulNo ratings yet
- Analysis of SEPIC For PV-Applications Using PI Controller and Current Mode ControlDocument4 pagesAnalysis of SEPIC For PV-Applications Using PI Controller and Current Mode ControlSindhujaSindhuNo ratings yet
- Steady-State Equivalent Circuit Modeling, Losses and Efficiency 08312021Document37 pagesSteady-State Equivalent Circuit Modeling, Losses and Efficiency 08312021f789sgacanonNo ratings yet
- Analysis and Design of SEPIC Converter in Boundary Conduction Mode For Universal-Line Power Factor Correction ApplicationsDocument6 pagesAnalysis and Design of SEPIC Converter in Boundary Conduction Mode For Universal-Line Power Factor Correction ApplicationsxynthianNo ratings yet
- Multiple Inverters Operated in Parallel For ProporDocument13 pagesMultiple Inverters Operated in Parallel For ProporakelNo ratings yet
- Bosst Koverter Mobil ListrikDocument10 pagesBosst Koverter Mobil ListrikAde safitraNo ratings yet
- QUT Digital Repository:: Conference (IPEC 2007), Pages Pp. 661-665, SingaporeDocument6 pagesQUT Digital Repository:: Conference (IPEC 2007), Pages Pp. 661-665, SingaporeSheetal VermaNo ratings yet
- Analysis Vienna RectifierDocument8 pagesAnalysis Vienna RectifierJose Luis RomeroNo ratings yet
- Power Quality Improvement Using Unified Power Quality Conditioner (UPQC)Document21 pagesPower Quality Improvement Using Unified Power Quality Conditioner (UPQC)Kumavat AmarNo ratings yet
- Design and Simulation of Phase-Shifted Full Bridge Converter For Hybrid Energy SystemsDocument6 pagesDesign and Simulation of Phase-Shifted Full Bridge Converter For Hybrid Energy SystemsjimmyNo ratings yet
- DQ-axis Synchronous Reference Frame Based P-Q Control of Grid Connected AC MicrogridDocument6 pagesDQ-axis Synchronous Reference Frame Based P-Q Control of Grid Connected AC MicrogridKumavat AmarNo ratings yet
- A Novel Step-Up Multi-Input DC-DC Converter For Hybrid Electric Vehicles ApplicationDocument14 pagesA Novel Step-Up Multi-Input DC-DC Converter For Hybrid Electric Vehicles ApplicationKumavat AmarNo ratings yet
- Design of A 50 KW Phase-Shifted Full-Bridge Converter Used For Fast Charging ApplicationsDocument5 pagesDesign of A 50 KW Phase-Shifted Full-Bridge Converter Used For Fast Charging ApplicationsKumavat AmarNo ratings yet
- Design and Simulation of Phase Shifted DC-DC Full Bridge ConverterDocument10 pagesDesign and Simulation of Phase Shifted DC-DC Full Bridge ConverterKumavat AmarNo ratings yet
- A Novel Step-Up Multi-Input DC-DC Converter For Hybrid Electric Vehicles ApplicationDocument14 pagesA Novel Step-Up Multi-Input DC-DC Converter For Hybrid Electric Vehicles ApplicationKumavat AmarNo ratings yet
- Design and Simulation of Phase Shifted DC-DC Full Bridge ConverterDocument10 pagesDesign and Simulation of Phase Shifted DC-DC Full Bridge ConverterKumavat AmarNo ratings yet
- Design of A 50 KW Phase-Shifted Full-Bridge Converter Used For Fast Charging ApplicationsDocument5 pagesDesign of A 50 KW Phase-Shifted Full-Bridge Converter Used For Fast Charging ApplicationsKumavat AmarNo ratings yet
- Excitation and AvrmDocument67 pagesExcitation and AvrmAlok Ranjan Tripathi100% (1)
- Unity Power FactorDocument6 pagesUnity Power FactorReshmi Parikal RaghavanNo ratings yet
- Basic Switching Power Supply Design TutorialDocument62 pagesBasic Switching Power Supply Design TutorialTj Ronz SaguidNo ratings yet
- TABLE 110.34 (A) Minimum Depth of Clear Working Space at Electrical EquipmentDocument4 pagesTABLE 110.34 (A) Minimum Depth of Clear Working Space at Electrical EquipmentKirtikumarNo ratings yet
- Elctrical Machine 1 Final ExamDocument4 pagesElctrical Machine 1 Final ExamAbdullahi Mohamed IsakNo ratings yet
- Electric Power Cross WordDocument1 pageElectric Power Cross Wordmiranti diah prastikaNo ratings yet
- 3 Phase Motor Starter Wiring PDFDocument2 pages3 Phase Motor Starter Wiring PDFSushil Kumar ShuklaNo ratings yet
- Caddy LHN 130-140-200Document36 pagesCaddy LHN 130-140-200Sergiu Badaluta100% (3)
- Tender To Be Opened (15 06 2017) )Document1 pageTender To Be Opened (15 06 2017) )MANOJNo ratings yet
- IPS-8 P3+P4.aiDocument1 pageIPS-8 P3+P4.aiKevin AnderssonNo ratings yet
- 01 - Wide Area Monitoring and ControlDocument69 pages01 - Wide Area Monitoring and ControlVishal GaurNo ratings yet
- Safety Rules and Precautions in A Power PlantDocument5 pagesSafety Rules and Precautions in A Power PlantJohn simpsonNo ratings yet
- Microgrids For Service Restoration To Critical Load in A Resilient Distribution SystemDocument12 pagesMicrogrids For Service Restoration To Critical Load in A Resilient Distribution System오병찬No ratings yet
- Electrical Load ScheduleDocument13 pagesElectrical Load ScheduleriteshNo ratings yet
- Metal Oxide Varistor Elbow M o V e Surge Arrester Catalog Ca235025enDocument8 pagesMetal Oxide Varistor Elbow M o V e Surge Arrester Catalog Ca235025enale_1905No ratings yet
- Side View of Consumer DP Structure: 11Kv HG Fuse Set DetailsDocument1 pageSide View of Consumer DP Structure: 11Kv HG Fuse Set DetailsDevidas JaijarNo ratings yet
- Modern Electric, Hybrid Electric & Fuel Cell Vehicles - Mehrdad EhsaniDocument8 pagesModern Electric, Hybrid Electric & Fuel Cell Vehicles - Mehrdad EhsaniPunit100% (2)
- EasyPact EZC - EZC400N4400NDocument6 pagesEasyPact EZC - EZC400N4400NAnirudh VNNo ratings yet
- Component of HVDC Transmission NetworkDocument5 pagesComponent of HVDC Transmission NetworkIqbalilah RamdaniNo ratings yet
- Training Report On National Thermal Power Corporation, MoudaDocument63 pagesTraining Report On National Thermal Power Corporation, MoudaBrijraj SinghNo ratings yet
- Battery Sizing: DefinitionsDocument4 pagesBattery Sizing: Definitionskrajeev2802No ratings yet
- Scilab Textbook Companion For Electric Power Generation, Transmission and Distribution by S. N. SinghDocument111 pagesScilab Textbook Companion For Electric Power Generation, Transmission and Distribution by S. N. SinghSSSRGI TURNITINNo ratings yet
- Primus Overview Catalogue ANGDocument8 pagesPrimus Overview Catalogue ANGpesumasinad0% (1)
- 114 - Fig 2 - PCB Layout (Nov 12) - 1kW SinewaveDocument1 page114 - Fig 2 - PCB Layout (Nov 12) - 1kW Sinewaveolumide100% (1)
- Busbar SystemDocument18 pagesBusbar SystemMadhan Kumar0% (1)
- ATP MSII Mid Term Exam.Document2 pagesATP MSII Mid Term Exam.A RNo ratings yet
- So Do Phuong Thuc Do Luong Bao Ve-Do Dem PDFDocument1 pageSo Do Phuong Thuc Do Luong Bao Ve-Do Dem PDFĐặng Xuân VinhNo ratings yet
- Catalog Burner, Model H440X PDFDocument3 pagesCatalog Burner, Model H440X PDFHưng QuangNo ratings yet
- Pec Reviewer1Document16 pagesPec Reviewer1Cielle negreteNo ratings yet
- DT Gen-Technical Data Sheet - DTG1000B-2023Document1 pageDT Gen-Technical Data Sheet - DTG1000B-2023chris connorsNo ratings yet
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialFrom EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialRating: 3.5 out of 5 stars3.5/5 (3)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeFrom EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeRating: 4.5 out of 5 stars4.5/5 (9)
- Digital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosFrom EverandDigital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosRating: 5 out of 5 stars5/5 (1)
- Analog Design and Simulation Using OrCAD Capture and PSpiceFrom EverandAnalog Design and Simulation Using OrCAD Capture and PSpiceNo ratings yet
- INCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesFrom EverandINCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesRating: 5 out of 5 stars5/5 (1)
- Programming the Raspberry Pi, Third Edition: Getting Started with PythonFrom EverandProgramming the Raspberry Pi, Third Edition: Getting Started with PythonRating: 5 out of 5 stars5/5 (2)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4.5 out of 5 stars4.5/5 (543)
- Hacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsFrom EverandHacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsRating: 3.5 out of 5 stars3.5/5 (2)
- Upcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)From EverandUpcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)Rating: 4.5 out of 5 stars4.5/5 (2)
- The Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesFrom EverandThe Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesRating: 5 out of 5 stars5/5 (1)
- Wearable Sensors: Fundamentals, Implementation and ApplicationsFrom EverandWearable Sensors: Fundamentals, Implementation and ApplicationsEdward SazonovNo ratings yet
- Current Interruption Transients CalculationFrom EverandCurrent Interruption Transients CalculationRating: 4 out of 5 stars4/5 (1)
- Practical Electronics for Inventors, Fourth EditionFrom EverandPractical Electronics for Inventors, Fourth EditionRating: 4 out of 5 stars4/5 (3)
- ARDUINO CODE: Mastering Arduino Programming for Embedded Systems (2024 Guide)From EverandARDUINO CODE: Mastering Arduino Programming for Embedded Systems (2024 Guide)No ratings yet
- Build Your Own Electric Vehicle, Third EditionFrom EverandBuild Your Own Electric Vehicle, Third EditionRating: 4.5 out of 5 stars4.5/5 (3)
- Understanding Automotive Electronics: An Engineering PerspectiveFrom EverandUnderstanding Automotive Electronics: An Engineering PerspectiveRating: 3.5 out of 5 stars3.5/5 (16)
- Teach Yourself Electricity and Electronics, 6th EditionFrom EverandTeach Yourself Electricity and Electronics, 6th EditionRating: 3.5 out of 5 stars3.5/5 (15)