You might also like
- Realni Brojevi-ObnavljanjeDocument13 pagesRealni Brojevi-ObnavljanjeНикола НикићNo ratings yet
- Matematika Inicijalni Test 4 RazredDocument12 pagesMatematika Inicijalni Test 4 RazredДејан Станојевић0% (1)
- Matematika Inicijalni Test 4 RazredDocument12 pagesMatematika Inicijalni Test 4 RazredДејан Станојевић0% (1)
- Index Termodinamika PDFDocument92 pagesIndex Termodinamika PDFKatie CraigNo ratings yet
- Mehanika 3Document8 pagesMehanika 3Jovan JovanovicNo ratings yet
- Polarizacija SvjetlostiDocument13 pagesPolarizacija SvjetlostiAleksandar ĆurguzNo ratings yet
- Olimpijada Fizika-ZadaciDocument124 pagesOlimpijada Fizika-ZadaciAlen AlićNo ratings yet
- Uvod U Analitičku MehanikuDocument53 pagesUvod U Analitičku MehanikuborisstodicNo ratings yet
- Osnovi Statističke FizikeDocument88 pagesOsnovi Statističke FizikeMihajlo TrajkovicNo ratings yet
- Motor JS I Brzinski ServomehanizamDocument9 pagesMotor JS I Brzinski ServomehanizamАлександар ВидојевићNo ratings yet
- Mehanika - Fluida.skripta CirilicaDocument95 pagesMehanika - Fluida.skripta CirilicaKenan PuzicNo ratings yet
- Laboratorijske Vežbe Omov ZakonDocument4 pagesLaboratorijske Vežbe Omov ZakonQuinceNo ratings yet
- Formalizam Kvantne MehanikeDocument57 pagesFormalizam Kvantne MehanikeSkercitoNo ratings yet
- FisicaDocument4 pagesFisicadestroyer 5No ratings yet
- Automatsko UpravljanjeDocument24 pagesAutomatsko Upravljanjediaries985No ratings yet
- Din 2Document9 pagesDin 2GaleNo ratings yet
- Zakoni OdrzanjaDocument9 pagesZakoni OdrzanjavmarkovickgNo ratings yet
- Problem Dva TelaDocument1 pageProblem Dva TelaAleksandar CiricNo ratings yet
- Vibracije VibracijeDocument20 pagesVibracije VibracijeJovana StojanovicNo ratings yet
- Talasno Kretanje, Talasi (Fizika)Document13 pagesTalasno Kretanje, Talasi (Fizika)Dušan SmiljkovićNo ratings yet
- Mehanika Fluida Dinamika FluidaDocument53 pagesMehanika Fluida Dinamika FluidaRobert MilanovicNo ratings yet
- Veºba 1 - Trofazni SistemiDocument10 pagesVeºba 1 - Trofazni SistemiDusan JovanovicNo ratings yet
- DinamikaDocument8 pagesDinamikaVladan SavicNo ratings yet
- Aproksimativne Metode U Kvantnoj MehaniciDocument30 pagesAproksimativne Metode U Kvantnoj MehaniciSkercitoNo ratings yet
- Mnogofizika - Neformalno Predavanje o Matematici U FiziciDocument68 pagesMnogofizika - Neformalno Predavanje o Matematici U FiziciLawrence ScotNo ratings yet
- Fpdom 1Document4 pagesFpdom 1DuskoNo ratings yet
- Tiristorski Kompenzatori Reaktivne EnergijeDocument21 pagesTiristorski Kompenzatori Reaktivne EnergijeZoran NastovNo ratings yet
- Talasno KretanjeDocument37 pagesTalasno KretanjeMihajlo TrajkovicNo ratings yet
- OAU Predavanje-1Document22 pagesOAU Predavanje-1aleksandar zivkovicNo ratings yet
- Teorija Stapa Staticki Odredjeni NosaciDocument25 pagesTeorija Stapa Staticki Odredjeni NosaciBug Crew100% (1)
- OscilacijeDocument60 pagesOscilacijeAbaz DroceNo ratings yet
- Fiz1 2017 Lect12Document20 pagesFiz1 2017 Lect12Meliha SpahićNo ratings yet
- магнетна хидродинамика-8мајDocument15 pagesмагнетна хидродинамика-8мајitkica itkaNo ratings yet
- Mehanika 3Document7 pagesMehanika 3Jovan JovanovicNo ratings yet
- 1.talasno KretanjeDocument14 pages1.talasno Kretanjedopudj95No ratings yet
- Ranko Koturovic Magistarski RadDocument34 pagesRanko Koturovic Magistarski RadmehanikamehanikaNo ratings yet
- ОАУ 5. смена предавање 26.04.Document11 pagesОАУ 5. смена предавање 26.04.Pavle BrkićNo ratings yet
- Osnovi Sistemske BiofizikeDocument10 pagesOsnovi Sistemske Biofizike畏No ratings yet
- Otpornost Materijala - Treća, Četvrta I Peta Nedelja PredavanjaDocument17 pagesOtpornost Materijala - Treća, Četvrta I Peta Nedelja PredavanjaПетар Васић100% (1)
- Лоренцове трансформацијеDocument10 pagesЛоренцове трансформацијеSenkaNo ratings yet
- Određivanje Konstante Difrakcione RešetkeDocument13 pagesOdređivanje Konstante Difrakcione RešetkeMilica MihajlovskiNo ratings yet
- 1 DinamikaDocument13 pages1 DinamikaMiroslav MladenovićNo ratings yet
- Statika Fluida PDFDocument5 pagesStatika Fluida PDFKazim HrspuricNo ratings yet
- Osnovi Kvantne MehanikeDocument4 pagesOsnovi Kvantne MehanikeculfisNo ratings yet
- SAUDocument186 pagesSAUcaranmiroslav100% (1)
- Demonstracioni Eksperimenti U Oblasti Mehanike FluidaDocument13 pagesDemonstracioni Eksperimenti U Oblasti Mehanike FluidaBojana NaumovskaNo ratings yet
- Oscilacije. Glava Prosto Harmonijsko Kretanje PDFDocument60 pagesOscilacije. Glava Prosto Harmonijsko Kretanje PDFMarko KoraćNo ratings yet
- CevovodiDocument10 pagesCevovodiSelena Selenche JosipovićNo ratings yet
- Seminarski Rad - Osn. MasinstvaDocument12 pagesSeminarski Rad - Osn. MasinstvaAna RistovicNo ratings yet
- Strujni HarmoniciDocument9 pagesStrujni HarmonicigalicruNo ratings yet
- Извештај рада са Старијим дечијим ансамблом 2020-21Document3 pagesИзвештај рада са Старијим дечијим ансамблом 2020-21Momcilo Moca DjurovicNo ratings yet
- Oba Vest EnjeDocument1 pageOba Vest EnjeMomcilo Moca DjurovicNo ratings yet
- 1649069383800 - Извештај рада са старијим дечијим ансамблом за 2014Document2 pages1649069383800 - Извештај рада са старијим дечијим ансамблом за 2014Momcilo Moca DjurovicNo ratings yet
- Obavestenja o Predmetu OSDocument12 pagesObavestenja o Predmetu OSMomcilo Moca DjurovicNo ratings yet
- IzračunajDocument1 pageIzračunajMomcilo Moca DjurovicNo ratings yet
- Četvorougao - Zadaci Za VežbanjeDocument2 pagesČetvorougao - Zadaci Za VežbanjeMomcilo Moca DjurovicNo ratings yet
- 05 Inicijalni Test Vi RazredDocument6 pages05 Inicijalni Test Vi RazredMomcilo Moca DjurovicNo ratings yet
- Kontr7raz ResenjaDocument1 pageKontr7raz ResenjaMomcilo Moca DjurovicNo ratings yet
- IsitDocument43 pagesIsitMomcilo Moca DjurovicNo ratings yet
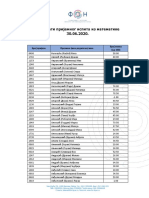
- Rezultati Prijemni Mat 30062020Document47 pagesRezultati Prijemni Mat 30062020Momcilo Moca DjurovicNo ratings yet
- skriptaAB PDFDocument155 pagesskriptaAB PDFcodataNo ratings yet
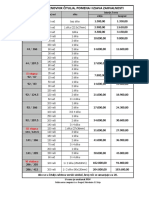
- Format CenaDocument1 pageFormat CenaMomcilo Moca DjurovicNo ratings yet
- Lista B 07.07.2015Document85 pagesLista B 07.07.2015Momcilo Moca DjurovicNo ratings yet
- 05 Inicijalni Test Vi RazredDocument6 pages05 Inicijalni Test Vi RazredMomcilo Moca DjurovicNo ratings yet
- Format CenaDocument1 pageFormat CenaMomcilo Moca DjurovicNo ratings yet
- DeklaracijaDocument1 pageDeklaracijaMomcilo Moca DjurovicNo ratings yet
- Format CenaDocument1 pageFormat CenaMomcilo Moca DjurovicNo ratings yet