You might also like
- Mechanics of Gears and Gear TrainsDocument73 pagesMechanics of Gears and Gear TrainsSteve ChaurasiyaNo ratings yet
- Kinematics of Gears and Gear TrainsDocument27 pagesKinematics of Gears and Gear TrainsAbdur RahmanNo ratings yet
- spur gearDocument73 pagesspur gearhaymanotNo ratings yet
- Mael FinalsDocument9 pagesMael FinalsAtzu YuNo ratings yet
- Understanding GearsDocument44 pagesUnderstanding Gearssamuel mechNo ratings yet
- History of GearsDocument52 pagesHistory of GearsAnthony FajardoNo ratings yet
- Gear CalculationDocument4 pagesGear CalculationAbel Salas LealNo ratings yet
- Module IV: Gears and Gear TrainsDocument38 pagesModule IV: Gears and Gear TrainsSuraj VinayNo ratings yet
- KDM UNIT-2 Gears - Gear TrainsDocument11 pagesKDM UNIT-2 Gears - Gear TrainsAchyuth KrishnaNo ratings yet
- Gears Terms GuideDocument8 pagesGears Terms GuideKevin JoeNo ratings yet
- Gears or Toothed Wheels Transmit MotionDocument47 pagesGears or Toothed Wheels Transmit MotionEbrahim HanashNo ratings yet
- Gear Management PDFDocument3 pagesGear Management PDFNoimuddin NeogNo ratings yet
- Mechanical Drives Gear SelectionDocument46 pagesMechanical Drives Gear Selectionganga6013No ratings yet
- Involute Spur GearDocument7 pagesInvolute Spur GeardhimanrayatNo ratings yet
- Gear TerminologyDocument11 pagesGear TerminologyGoutam AcharjeeNo ratings yet
- Gear TerminologyDocument42 pagesGear Terminologyyair Enrique Romero OspinoNo ratings yet
- Conjugate Tooth-1-2 PDFDocument8 pagesConjugate Tooth-1-2 PDFHarshavardhan Kutal100% (1)
- DVGDocument53 pagesDVGbalajigandhirajanNo ratings yet
- 202003291623595791prince Singh Spur GearDocument10 pages202003291623595791prince Singh Spur GearDARPAN BHARDWAJNo ratings yet
- BEH 41103 Chapt 1Document14 pagesBEH 41103 Chapt 1Fairoz UsuNo ratings yet
- Introduction To Mechanisms: 7 GearsDocument15 pagesIntroduction To Mechanisms: 7 GearsgauravthamanNo ratings yet
- Gears: Looking For GATE Preparation Material? Join & Get Here Now!Document8 pagesGears: Looking For GATE Preparation Material? Join & Get Here Now!Akash SoniNo ratings yet
- Introduction To Mechanisms: 7 GearsDocument15 pagesIntroduction To Mechanisms: 7 GearsDezert EagleNo ratings yet
- Unit IVDocument70 pagesUnit IVMugilNo ratings yet
- DMM - 2 R19 - UNIT-4 (Ref-2)Document39 pagesDMM - 2 R19 - UNIT-4 (Ref-2)PavaniNo ratings yet
- Gear Pitch Surface DefinitionsDocument2 pagesGear Pitch Surface DefinitionsMari MuthuNo ratings yet
- Chap-6 Gears 1Document30 pagesChap-6 Gears 1AlysNo ratings yet
- Gear Trains: Qassim University Unayzah College of Engineering Mechanical Engineering DeptDocument42 pagesGear Trains: Qassim University Unayzah College of Engineering Mechanical Engineering DeptDanialNo ratings yet
- Unit-5 Gears and Gear Trains: Guru Nanak Institute of TechnologyDocument9 pagesUnit-5 Gears and Gear Trains: Guru Nanak Institute of TechnologyKonduru Vinay Kumar ReddyNo ratings yet
- Theory of Machine: Toothed GearingDocument14 pagesTheory of Machine: Toothed GearingRs SumitNo ratings yet
- ME 2213 (Gear)Document27 pagesME 2213 (Gear)tanvir2013004No ratings yet
- GearDocument35 pagesGearNIYASNo ratings yet
- GearsDocument70 pagesGearsJayesh NayakantiNo ratings yet
- 7 Gears: 7.1 Gear ClassificationDocument15 pages7 Gears: 7.1 Gear ClassificationSimrit Kaur MakanNo ratings yet
- Terminology SpurDocument3 pagesTerminology SpurNimish Pande100% (1)
- Gear TrainsDocument24 pagesGear Trainsjacob ellyNo ratings yet
- Types of Gears ExplainedDocument50 pagesTypes of Gears ExplainedMuralikrishnan GM100% (1)
- Gear Geometry & Profile TheoryDocument24 pagesGear Geometry & Profile Theoryansh1983100% (2)
- Kom May-June 2013Document8 pagesKom May-June 2013nazeerabiaNo ratings yet
- Functions of Gear and Friction WheelsDocument8 pagesFunctions of Gear and Friction WheelsMuhammed Ali ASNo ratings yet
- Gear terminology guide for key termsDocument5 pagesGear terminology guide for key termsRabia ZulqarnainNo ratings yet
- GEARS & GEAR TRAINS: KEY TERMINOLOGYDocument32 pagesGEARS & GEAR TRAINS: KEY TERMINOLOGYMuhammed Ali ASNo ratings yet
- Stress Reduction in Spur Gears Using Aero-Fin Shaped HolesDocument11 pagesStress Reduction in Spur Gears Using Aero-Fin Shaped HolesJojee MarieNo ratings yet
- Gear Terms Explained: Pitch Circle, Diametral Pitch and MoreDocument10 pagesGear Terms Explained: Pitch Circle, Diametral Pitch and MoreJawad Ullah100% (2)
- Gear NomenclatureDocument41 pagesGear NomenclatureViswanathan SrkNo ratings yet
- Definition:: Spur GearDocument24 pagesDefinition:: Spur GearMuthuvel MNo ratings yet
- Gear Terminology: Pitch Circle: Addendum Circle: Dedendum Circle: ClearanceDocument11 pagesGear Terminology: Pitch Circle: Addendum Circle: Dedendum Circle: ClearanceFawad HassanNo ratings yet
- Gear Terms and DefinitionsDocument5 pagesGear Terms and DefinitionsAaron_Liu_1555No ratings yet
- 2 Marks: Q & A Spur Gear Terminology and DefinitionsDocument71 pages2 Marks: Q & A Spur Gear Terminology and DefinitionsPrasanna Sekar0% (1)
- Gear Classification: Page - 1Document12 pagesGear Classification: Page - 1maloyNo ratings yet
- DMS PPTDocument116 pagesDMS PPTAyush BhardwajNo ratings yet
- Gonowon 3c Gear NomenclatureDocument32 pagesGonowon 3c Gear NomenclatureSheena LaniogNo ratings yet
- Gears ExplainedDocument76 pagesGears ExplainedShahzeb AlamgirNo ratings yet
- Helical GearDocument5 pagesHelical GearMohsin IftikharNo ratings yet
- Note On Gear BoxDocument32 pagesNote On Gear BoxanupbagNo ratings yet
- Gear TerminologyDocument21 pagesGear TerminologyAns ahmed100% (1)
- Cylindrical Compression Helix Springs For Suspension SystemsFrom EverandCylindrical Compression Helix Springs For Suspension SystemsNo ratings yet
- 19BME0804 PDM Lab Exp 5 Drone Frame X8 and X12Document12 pages19BME0804 PDM Lab Exp 5 Drone Frame X8 and X12Tim DrakeNo ratings yet
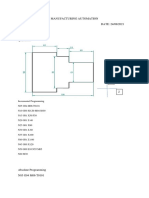
- Reg. No.: 20BME0540 Name: Atharva Ashturkar Sub: Manufacturing Automation Lab: L59 + L60Document4 pagesReg. No.: 20BME0540 Name: Atharva Ashturkar Sub: Manufacturing Automation Lab: L59 + L60Tim DrakeNo ratings yet
- Ilovepdf MergedDocument10 pagesIlovepdf MergedTim DrakeNo ratings yet
- 19BME0804 PDM Lab Exp 5 Drone Frame X8 and X12Document12 pages19BME0804 PDM Lab Exp 5 Drone Frame X8 and X12Tim DrakeNo ratings yet
- Turning Moment DiagramDocument20 pagesTurning Moment DiagramTim DrakeNo ratings yet
- Dynamic Force AnalysisDocument27 pagesDynamic Force AnalysisTim DrakeNo ratings yet
- Manu Auto Assighnment - 01Document6 pagesManu Auto Assighnment - 01Tim DrakeNo ratings yet
- Fall 2021 - 22 Course Allocation ReportDocument117 pagesFall 2021 - 22 Course Allocation ReportSubarna LamsalNo ratings yet
- Manufacturing Automation: Digital Assignment-1Document1 pageManufacturing Automation: Digital Assignment-1Tim DrakeNo ratings yet
- Msds Innuprep Dna Rna Mini KitDocument21 pagesMsds Innuprep Dna Rna Mini KitsyaranfbNo ratings yet
- DMRC Project (Mech)Document33 pagesDMRC Project (Mech)Jyoti Singh100% (3)
- Traction Transformers From SiemensDocument10 pagesTraction Transformers From Siemenscosty_transNo ratings yet
- Pedestal Column For Tower-Usd: Ast (MM 2) Ab (MM 2)Document18 pagesPedestal Column For Tower-Usd: Ast (MM 2) Ab (MM 2)Joy lauriaNo ratings yet
- Linux Interview QuestionsDocument4 pagesLinux Interview QuestionsPaaventhan DharmarajanNo ratings yet
- Thyrodur 2210Document1 pageThyrodur 2210Grafički RadoviNo ratings yet
- Annikken Andee User GuideDocument68 pagesAnnikken Andee User Guiderivamara5960100% (1)
- Dam PluggingDocument104 pagesDam PluggingMpho Vince MatlouNo ratings yet
- Alternator & Regulator - BoschDocument6 pagesAlternator & Regulator - BoschIordan AdrianNo ratings yet
- Print: 2Zr-Fe Engine Control Sfi System System DiagramDocument10 pagesPrint: 2Zr-Fe Engine Control Sfi System System DiagramAlfredo MedinaNo ratings yet
- Multimaster 300 XDocument2 pagesMultimaster 300 Xcamelod555No ratings yet
- Dme Mid1 Question PaperDocument2 pagesDme Mid1 Question PaperPavaniNo ratings yet
- Rock Mass Classification SystemsDocument33 pagesRock Mass Classification Systemsmortaza7094No ratings yet
- Color TV: Service ManualDocument23 pagesColor TV: Service ManualVictor Gonzales SanchezNo ratings yet
- Co2 Extinguihsers Ul ListedDocument2 pagesCo2 Extinguihsers Ul ListedAmeen Hamed AlwseyNo ratings yet
- 123 ChemDocument4 pages123 Chemoperator daazNo ratings yet
- GTO Block Diagram FinalDocument2 pagesGTO Block Diagram Finalamit guinNo ratings yet
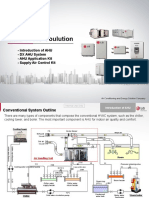
- (Multi V Task) Technical Seminar - Multi V AHU Solution - FinalDocument36 pages(Multi V Task) Technical Seminar - Multi V AHU Solution - FinalPaulo Augusto GarayNo ratings yet
- Name of Work: Estimation For Proposed Construction of Tara Ramesh, Tangali, Kadur Taluk, Chikkamagalur DistrictDocument25 pagesName of Work: Estimation For Proposed Construction of Tara Ramesh, Tangali, Kadur Taluk, Chikkamagalur DistrictDEEPIKANo ratings yet
- Determination of HCV of Solid or Liquid Fuel Using Bomb CalorimeterDocument11 pagesDetermination of HCV of Solid or Liquid Fuel Using Bomb CalorimeterRavi PatilNo ratings yet
- Principles of Metal Forming TheoryDocument21 pagesPrinciples of Metal Forming TheoryAshok Kumar UppariNo ratings yet
- GTSTRUDL 32 - Student Edition 13: Quick-Start InstructionsDocument3 pagesGTSTRUDL 32 - Student Edition 13: Quick-Start InstructionsVimalan KannanNo ratings yet
- Microproessor - Microprocessor and Its Components - : Qisthi Al Hazmi HR., S.T., M.TDocument21 pagesMicroproessor - Microprocessor and Its Components - : Qisthi Al Hazmi HR., S.T., M.TChuenk NeutronNo ratings yet
- Conexion de M800 PDFDocument16 pagesConexion de M800 PDFChemikal EngineerNo ratings yet
- Honeywell ST9400SDocument6 pagesHoneywell ST9400SPas SommeseNo ratings yet
- Install GuideDocument63 pagesInstall GuideĐểGióCuốnĐiNo ratings yet
- Goat Milking Stand Plans PDFDocument6 pagesGoat Milking Stand Plans PDFcowboyNo ratings yet
- DL650K9Document187 pagesDL650K9Juan Abraham AjpopNo ratings yet
- SAFIR 2011 ManualDocument58 pagesSAFIR 2011 ManualCZengenhariaNo ratings yet
- Unit I Acoustics Planning For Noise, STC, NRCDocument9 pagesUnit I Acoustics Planning For Noise, STC, NRCKavya DesaiNo ratings yet