You might also like
- Magnetic Effect of Current PDFDocument45 pagesMagnetic Effect of Current PDFPuneet Kapoor100% (1)
- Physics Investigatory ProjectDocument17 pagesPhysics Investigatory ProjectSubhasish BeheraNo ratings yet
- LP Energy BasicsDocument6 pagesLP Energy BasicsJedNo ratings yet
- Two Phase Flow PresentationDocument25 pagesTwo Phase Flow PresentationAnant Joshi100% (1)
- 66kV BUSCOUPLERDocument73 pages66kV BUSCOUPLERMadan KoukuntlaNo ratings yet
- Magnetic Effects of Current PDFDocument32 pagesMagnetic Effects of Current PDFAdarshNo ratings yet
- Feynman Lectures Simplified 2C: Electromagnetism: in Relativity & in Dense MatterFrom EverandFeynman Lectures Simplified 2C: Electromagnetism: in Relativity & in Dense MatterNo ratings yet
- Class 12 Physics Revision Notes Moving Charges and Magnetism (1) LEARN WITH GIGACHADSDocument13 pagesClass 12 Physics Revision Notes Moving Charges and Magnetism (1) LEARN WITH GIGACHADSShwetabh Aman SinhaNo ratings yet
- Moving Charges and MagnetismDocument27 pagesMoving Charges and MagnetismAkashNo ratings yet
- Moving Charges and Magnetism: Chapter - 4Document52 pagesMoving Charges and Magnetism: Chapter - 4hlloNo ratings yet
- 1 Magnetic Effect of Current 1Document10 pages1 Magnetic Effect of Current 1Jinshy VinodNo ratings yet
- Chapter-4 - Moving Charges and MagnetismDocument8 pagesChapter-4 - Moving Charges and MagnetismAmit YadavNo ratings yet
- Chapter-4 - Moving Charges and MagnetismDocument8 pagesChapter-4 - Moving Charges and MagnetismAdarsh Silkoti100% (1)
- Chapter-4 - Moving Charges and MagnetismDocument8 pagesChapter-4 - Moving Charges and MagnetismAdarsh SilkotiNo ratings yet
- Study Materials: Vedantu Innovations Pvt. Ltd. Score High With A Personal Teacher, Learn LIVE Online!Document8 pagesStudy Materials: Vedantu Innovations Pvt. Ltd. Score High With A Personal Teacher, Learn LIVE Online!THANIGAINATHAN.G.D 10A3No ratings yet
- Study Materials: Vedantu Innovations Pvt. Ltd. Score High With A Personal Teacher, Learn LIVE Online!Document8 pagesStudy Materials: Vedantu Innovations Pvt. Ltd. Score High With A Personal Teacher, Learn LIVE Online!THANIGAINATHAN.G.D 10A3No ratings yet
- Study Materials: Vedantu Innovations Pvt. Ltd. Score High With A Personal Teacher, Learn LIVE Online!Document8 pagesStudy Materials: Vedantu Innovations Pvt. Ltd. Score High With A Personal Teacher, Learn LIVE Online!TOT MASTERNo ratings yet
- Study Materials: Vedantu Innovations Pvt. Ltd. Score High With A Personal Teacher, Learn LIVE Online!Document8 pagesStudy Materials: Vedantu Innovations Pvt. Ltd. Score High With A Personal Teacher, Learn LIVE Online!deviNo ratings yet
- Study Materials: Vedantu Innovations Pvt. Ltd. Score High With A Personal Teacher, Learn LIVE Online!Document8 pagesStudy Materials: Vedantu Innovations Pvt. Ltd. Score High With A Personal Teacher, Learn LIVE Online!xyzNo ratings yet
- Magnetic and Mechanic Effect of Electric CurrentDocument135 pagesMagnetic and Mechanic Effect of Electric Currentroydenmiranda62No ratings yet
- Magnetic Effect of Electric Current & Mechanical Effct of Electric CurrentDocument41 pagesMagnetic Effect of Electric Current & Mechanical Effct of Electric CurrentShweta Y KNo ratings yet
- Magnetism Formula RevisionDocument4 pagesMagnetism Formula RevisionSuyash GuptaNo ratings yet
- Moving Charge and Magnetism Class 12 Short NotesDocument9 pagesMoving Charge and Magnetism Class 12 Short Notesprakhichar1316No ratings yet
- Magnetic Effects of CurrentDocument32 pagesMagnetic Effects of CurrentRohit BhardwajNo ratings yet
- Electro Magnetic Field (EMF)Document42 pagesElectro Magnetic Field (EMF)d anjilappaNo ratings yet
- 1 Magnetic Effect of Current 1Document14 pages1 Magnetic Effect of Current 1pratscribdNo ratings yet
- Magnetic Effect of Current - IDocument34 pagesMagnetic Effect of Current - IAjaya KumarNo ratings yet
- SR Inter Ipe Question Bank Chapter-Vii (Moving Charges and Magnetism)Document16 pagesSR Inter Ipe Question Bank Chapter-Vii (Moving Charges and Magnetism)sojakoj867No ratings yet
- Moving Charges and MagnetismDocument6 pagesMoving Charges and MagnetismRiki BorahNo ratings yet
- 25 May 2022 PhysicsDocument13 pages25 May 2022 Physicsadsaks2528No ratings yet
- Magnetic Effect of Current - IiiDocument7 pagesMagnetic Effect of Current - IiiKashyap PatelNo ratings yet
- Magnetic Effect of Current - IiiDocument7 pagesMagnetic Effect of Current - IiiNitesh GuptaNo ratings yet
- Magnetic Effect of Current - IiiDocument7 pagesMagnetic Effect of Current - IiiJinshy VinodNo ratings yet
- Magnetic Effects of Current - Short Notes - VIJETA SERIES CLASS-12THDocument3 pagesMagnetic Effects of Current - Short Notes - VIJETA SERIES CLASS-12THAbhinav BhendarkarNo ratings yet
- 4-Magnetic Effect 2021Document27 pages4-Magnetic Effect 2021Shamit MNo ratings yet
- Sources of Magnetic FieldsDocument13 pagesSources of Magnetic FieldsAbdalla FarisNo ratings yet
- 3 Magnetic Effect-Of Current 3Document7 pages3 Magnetic Effect-Of Current 3Sreyasi SarkarNo ratings yet
- Biot 200601154800Document26 pagesBiot 200601154800UMAIR ASHFAQNo ratings yet
- Moving Charges MagnetismDocument5 pagesMoving Charges MagnetismPranshu PatelNo ratings yet
- Chap-4 Physics Class 12Document28 pagesChap-4 Physics Class 12GlendNo ratings yet
- CH 29Document51 pagesCH 29ameliawenston3No ratings yet
- DocScanner 18-Jul-2023 6-53 AmDocument10 pagesDocScanner 18-Jul-2023 6-53 AmSandeep KumarNo ratings yet
- Magnetic Effects of Current and MagnetismDocument17 pagesMagnetic Effects of Current and MagnetismsubNo ratings yet
- 18 Magnetic Effects of Current Formula Sheets Getmarks AppDocument5 pages18 Magnetic Effects of Current Formula Sheets Getmarks Appmishrabhishek7701No ratings yet
- Magnetic Effect of Current: Key Concept Exercise - I Exercise - Ii Exercise - Iii Answer KeyDocument19 pagesMagnetic Effect of Current: Key Concept Exercise - I Exercise - Ii Exercise - Iii Answer KeyRoNNo ratings yet
- Electromagnetism - A ViewDocument26 pagesElectromagnetism - A ViewClaudia AbreuNo ratings yet
- Moving Charges FinalDocument41 pagesMoving Charges FinalVinothNo ratings yet
- Section 1: Magnetic Field Due To CurrentsDocument9 pagesSection 1: Magnetic Field Due To CurrentsybobbyxNo ratings yet
- Electromagnetic Induction Physics Talks - 110617Document17 pagesElectromagnetic Induction Physics Talks - 110617godparticle.chessNo ratings yet
- 18 Magnetic Effects of Current Formula Sheets QuizrrDocument5 pages18 Magnetic Effects of Current Formula Sheets QuizrrDhairya SharmaNo ratings yet
- Magnetism Sub SheetDocument18 pagesMagnetism Sub SheetVipul VermaNo ratings yet
- Electro Magnetic Field PDFDocument42 pagesElectro Magnetic Field PDFTrickkrickNo ratings yet
- Bansal Magnetic Effect of CurrentDocument31 pagesBansal Magnetic Effect of Currentbhnprtp90100% (1)
- Magnetic Effect of CurrentDocument19 pagesMagnetic Effect of CurrentRaju Singh0% (1)
- Mod-7 Biotamp LawDocument6 pagesMod-7 Biotamp Lawapi-3766872No ratings yet
- 1233140-Motion of Charge and Magnetic FieldDocument22 pages1233140-Motion of Charge and Magnetic FieldMohit SahuNo ratings yet
- Modelling Power Systems 3Document5 pagesModelling Power Systems 3Alexis Hernandez SangermanNo ratings yet
- Magnetic Effect of Current and Magnetism: SyllabusDocument18 pagesMagnetic Effect of Current and Magnetism: Syllabusaabid ahmedNo ratings yet
- TEM II TareaDocument13 pagesTEM II TareaF1a2s3s4No ratings yet
- ECE330 Fall 16 Lecture2 PDFDocument9 pagesECE330 Fall 16 Lecture2 PDFPhùng Đức AnhNo ratings yet
- Magnetic Effect of Current 1 MMDocument48 pagesMagnetic Effect of Current 1 MMnamitjain98No ratings yet
- Cheatsheet MagnetismDocument2 pagesCheatsheet Magnetismsukaina fatimaNo ratings yet
- Magnetostatics: V R V Igdt DT RDocument5 pagesMagnetostatics: V R V Igdt DT RJoel DsouzaNo ratings yet
- Geophysical Field Theory and Method, Part B: Electromagnetic Fields IFrom EverandGeophysical Field Theory and Method, Part B: Electromagnetic Fields INo ratings yet
- EC105Document20 pagesEC105api-3853441No ratings yet
- Notes On Rotational MotionDocument41 pagesNotes On Rotational Motionnagito komaedaNo ratings yet
- ISV SM Ch32Document35 pagesISV SM Ch32손은결No ratings yet
- Physics For Scientists and Engineers, 6e: Chapter - 32 InductanceDocument15 pagesPhysics For Scientists and Engineers, 6e: Chapter - 32 InductancejonNo ratings yet
- Thermofluid Practical 2.0Document37 pagesThermofluid Practical 2.0Tshawe IsaacNo ratings yet
- Cooling Tower Thermodynamic Exp 5Document16 pagesCooling Tower Thermodynamic Exp 5hayder alaliNo ratings yet
- G4 AA LT ForceDocument2 pagesG4 AA LT ForceRafaelle Sanvictores SilongNo ratings yet
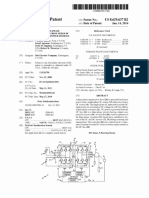
- United States Patent: (10) Patent No.: US 8,629,637 B2Document13 pagesUnited States Patent: (10) Patent No.: US 8,629,637 B2AhmedNo ratings yet
- Data Sheet - 1 Att - 1-1 - Process DS For E-301 To 328ABCD Air Heaters For STV GW Loop - Modified R1 - 20160919 (Only Unit Revised)Document2 pagesData Sheet - 1 Att - 1-1 - Process DS For E-301 To 328ABCD Air Heaters For STV GW Loop - Modified R1 - 20160919 (Only Unit Revised)Avinash ShuklaNo ratings yet
- Weight CalculatorDocument4 pagesWeight CalculatorVivek PrajapatiNo ratings yet
- ThermistorDocument4 pagesThermistorKrypton HalideNo ratings yet
- TRX - Vertical Multistage Inline - 2019-16Document1 pageTRX - Vertical Multistage Inline - 2019-16Jason Wei Han LeeNo ratings yet
- Moment Inertia PDFDocument44 pagesMoment Inertia PDFfairuz disyaNo ratings yet
- Unit I Generator and Motor - 11Document32 pagesUnit I Generator and Motor - 11Bharani100% (1)
- Lenin Cheat Betraying MarxDocument406 pagesLenin Cheat Betraying MarxKHAN1206No ratings yet
- Thermodynamics ME10003: DR Kevin Robinson (4E 2.25)Document235 pagesThermodynamics ME10003: DR Kevin Robinson (4E 2.25)shuaiyuan chenNo ratings yet
- 3.7.2.4 Orbits of Planets and SatellitesDocument55 pages3.7.2.4 Orbits of Planets and SatellitesAngel BananasNo ratings yet
- POWER SYSTEMS - II (Transmission and Distribution) : Part-A Instructions: (1) Answer All QuestionsDocument4 pagesPOWER SYSTEMS - II (Transmission and Distribution) : Part-A Instructions: (1) Answer All Questionsmyjio830906No ratings yet
- Mechanics Practice Papers 2Document13 pagesMechanics Practice Papers 2Sarvesh DubeyNo ratings yet
- Battery and DC System Protection Coordination (Very GOOD)Document43 pagesBattery and DC System Protection Coordination (Very GOOD)Gustavo AguayoNo ratings yet
- Electrostatics 04Document22 pagesElectrostatics 04nithin_v90No ratings yet
- HV Standard Capacitor SF6 Gas-FilledDocument1 pageHV Standard Capacitor SF6 Gas-FilledMaitraya RaiNo ratings yet
- Chen 3009 - Tutorial 1-2021Document31 pagesChen 3009 - Tutorial 1-2021Rosario QFNo ratings yet
- Mod 4 Capc&DilecsDocument10 pagesMod 4 Capc&Dilecsapi-3766872No ratings yet
- PHY 221 Long Quiz #3 - MagnetismDocument1 pagePHY 221 Long Quiz #3 - MagnetismCatherine Shaina O. PasionNo ratings yet
- Sharp 29gxf500Document27 pagesSharp 29gxf500julius chanNo ratings yet