You might also like
- Mishra 2013Document12 pagesMishra 2013Neethu Elizabeth MichaelNo ratings yet
- Dynamic Modeling of Microgrid For Grid Connected and Intentional Islanding OperationDocument6 pagesDynamic Modeling of Microgrid For Grid Connected and Intentional Islanding OperationmedbNo ratings yet
- Tan 2019Document14 pagesTan 2019HOD Electrical DegreeNo ratings yet
- Hierarchical Model-Predictive Droop Control For Voltage and Frequency Restoration in AC MicrogridsDocument13 pagesHierarchical Model-Predictive Droop Control For Voltage and Frequency Restoration in AC Microgridsnaga_rajNo ratings yet
- 10.1515 - Ijeeps 2021 03671 1Document14 pages10.1515 - Ijeeps 2021 03671 1Arkan ahmed husseinNo ratings yet
- An Autonomous Model Predictive Control of GridDocument22 pagesAn Autonomous Model Predictive Control of GridSeeraphNo ratings yet
- Protection Strategy For Fault Detection in Inverter-Dominated Low Voltage AC MicrogridDocument8 pagesProtection Strategy For Fault Detection in Inverter-Dominated Low Voltage AC MicrogridM8ow6fNo ratings yet
- A New Placement and Integration Method of UPQC To Improve The Power Quality in DG NetworkDocument6 pagesA New Placement and Integration Method of UPQC To Improve The Power Quality in DG NetworkDr. Gollapalli NareshNo ratings yet
- Control and Stability of Microgrid During Grid To Island ModeDocument6 pagesControl and Stability of Microgrid During Grid To Island ModeInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Ashabani4Document13 pagesAshabani4happyworryNo ratings yet
- Grid Integration of Small-Scale Photovoltaic Systems in Secondary Distribution Network-A ReviewDocument18 pagesGrid Integration of Small-Scale Photovoltaic Systems in Secondary Distribution Network-A ReviewroyNo ratings yet
- DFIG Weak Grid 2020Document9 pagesDFIG Weak Grid 2020ALI BOUKHRISSNo ratings yet
- Analysis of A Multifunctional Inverter Active-Filtering Function Influence On The Small-Signal Stability of Inverter-Based Islanded AC MicrogridsDocument10 pagesAnalysis of A Multifunctional Inverter Active-Filtering Function Influence On The Small-Signal Stability of Inverter-Based Islanded AC Microgridsnaga_rajNo ratings yet
- Renewable Energy: Muhammad Talha, S.R.S. Raihan, N Abd RahimDocument16 pagesRenewable Energy: Muhammad Talha, S.R.S. Raihan, N Abd RahimsharvinNo ratings yet
- Kim 2011Document13 pagesKim 2011Eman TarekNo ratings yet
- Kanwal 2023Document25 pagesKanwal 2023Muhammad Qasim RaufNo ratings yet
- 1 s2.0 S0378779622008823 MainDocument17 pages1 s2.0 S0378779622008823 MainSouhila Rached ZINENo ratings yet
- Development of An Outdoor Diesel Generator - PV Microgrid For Education and ResearchDocument5 pagesDevelopment of An Outdoor Diesel Generator - PV Microgrid For Education and ResearchSagar MudunuriNo ratings yet
- Prehensive Controller Implementation For Wind-PV-Diesel Based Standalone Microgrid - MATLAB 2018ADocument12 pagesPrehensive Controller Implementation For Wind-PV-Diesel Based Standalone Microgrid - MATLAB 2018AstarboyNo ratings yet
- Strategy of Research and Application For The Microgrid Coordinated ControlDocument6 pagesStrategy of Research and Application For The Microgrid Coordinated Controlasdfvbnmghjk22No ratings yet
- Control of Microgrid For Different Modes of Operation IJERTV5IS051001Document6 pagesControl of Microgrid For Different Modes of Operation IJERTV5IS051001Seerat Aaftaab BarkatNo ratings yet
- 2024 - Development of Control Strategy For Community Battery Energy Storage System in Grid-Connected Microgrid of High Photovoltaic Penetration LevelDocument15 pages2024 - Development of Control Strategy For Community Battery Energy Storage System in Grid-Connected Microgrid of High Photovoltaic Penetration Levelsamara.chavesNo ratings yet
- Control For Grid Connected DFIG Based Wind Energy System Using Adaptive Neuro Fuzzy TechniqueDocument18 pagesControl For Grid Connected DFIG Based Wind Energy System Using Adaptive Neuro Fuzzy TechniqueSagiraju DileepNo ratings yet
- Emerging technologies, opportunities and challenges for microgrid stability and controlDocument19 pagesEmerging technologies, opportunities and challenges for microgrid stability and controlcongduy0908No ratings yet
- 05 2016-3-6-pp.27-34Document8 pages05 2016-3-6-pp.27-34Meisha desionasistaNo ratings yet
- Energies 13 05996 v2Document28 pagesEnergies 13 05996 v2Suswagata SatpathyNo ratings yet
- SETA-D-24-00682Document26 pagesSETA-D-24-00682Johhny DeppNo ratings yet
- IET Generation Trans Dist - 2021 - BagchiDocument12 pagesIET Generation Trans Dist - 2021 - BagchiMohamed SobhyNo ratings yet
- Aalborg Universitet: Sun, Xiaofeng Chen, J. Guerrero, Josep M. Li, X. Wang, LDocument14 pagesAalborg Universitet: Sun, Xiaofeng Chen, J. Guerrero, Josep M. Li, X. Wang, LSudeep shettyNo ratings yet
- Application of Model Current Predictive Control in Low Voltage Ride Through of Photovoltaic StationDocument6 pagesApplication of Model Current Predictive Control in Low Voltage Ride Through of Photovoltaic StationVinsen Teubun LetsoinNo ratings yet
- protection_BESSDocument8 pagesprotection_BESSPratikKumarNo ratings yet
- An Adaptive Reactive Power Perturbation Based Hybrid Islanding Detection Method For Distributed Generation SystemsDocument12 pagesAn Adaptive Reactive Power Perturbation Based Hybrid Islanding Detection Method For Distributed Generation SystemsDattaraya GaonkarNo ratings yet
- Impact of Grid Disturbances On The Output of Grid Connected Solar Photovoltaic SystemDocument6 pagesImpact of Grid Disturbances On The Output of Grid Connected Solar Photovoltaic SystemEsteban SotoNo ratings yet
- IEIB-D-22-00311Document9 pagesIEIB-D-22-00311saurabhguptasgsits123No ratings yet
- Modelling and Control of A Grid-Connected PV System For Smart Grid IntegrationDocument6 pagesModelling and Control of A Grid-Connected PV System For Smart Grid IntegrationHemalatha RajeshNo ratings yet
- Chaphekar 2015Document6 pagesChaphekar 2015yohanis eshetuNo ratings yet
- Virtual Impedance Alpha BetaDocument8 pagesVirtual Impedance Alpha BetaBeshoy AbdouNo ratings yet
- Stability Analysis of Grid For Variation in The System PerformanceDocument8 pagesStability Analysis of Grid For Variation in The System PerformanceerpublicationNo ratings yet
- Droop Controlled Microgrid With DSTATCOM For Reactive Power Compensation and Power Quality ImprovementDocument13 pagesDroop Controlled Microgrid With DSTATCOM For Reactive Power Compensation and Power Quality ImprovementE-dot ProjectNo ratings yet
- Electric Power Systems Research: SciencedirectDocument7 pagesElectric Power Systems Research: SciencedirectAbir HezziNo ratings yet
- Design and Development of A Grid Tied Solar InverterDocument5 pagesDesign and Development of A Grid Tied Solar InverterSyed ZadaaNo ratings yet
- Irjet V5i768Document5 pagesIrjet V5i768Lena CabilunaNo ratings yet
- Solar - Photovoltaic - Generators - With - MPPT - and - BatterDocument12 pagesSolar - Photovoltaic - Generators - With - MPPT - and - BatterCB MildredNo ratings yet
- A Dynamic Voltage Restorer (DVR) Based Interface Scheme For MicrogridsDocument7 pagesA Dynamic Voltage Restorer (DVR) Based Interface Scheme For MicrogridsrajapandiyaNo ratings yet
- Maximizing Stand-Alone PV System Power Using Fuzzy Sliding Mode MPPT ControlDocument6 pagesMaximizing Stand-Alone PV System Power Using Fuzzy Sliding Mode MPPT ControlRahmatul HafizahNo ratings yet
- Reactive Power Compensation by Using V2G Technology: International Journal of Pure and Applied Mathematics No. 24 2018Document13 pagesReactive Power Compensation by Using V2G Technology: International Journal of Pure and Applied Mathematics No. 24 2018premsonyNo ratings yet
- Virtual Synchronous Generators SurveyedDocument11 pagesVirtual Synchronous Generators Surveyededmuarizt7078No ratings yet
- Kanwal 2019Document6 pagesKanwal 2019Muhammad Qasim RaufNo ratings yet
- Automatic Synchronizing and Protection Relay DesignDocument6 pagesAutomatic Synchronizing and Protection Relay DesignElectrotrend hsrNo ratings yet
- 1 s2.0 S1876610214027908 Main PDFDocument7 pages1 s2.0 S1876610214027908 Main PDFkullay reddy desi reddyNo ratings yet
- DQ-axis Synchronous Reference Frame Based P-Q Control of Grid Connected AC MicrogridDocument6 pagesDQ-axis Synchronous Reference Frame Based P-Q Control of Grid Connected AC MicrogridKumavat AmarNo ratings yet
- Adaptive sliding-mode voltage control enhances microgrid inverter performanceDocument11 pagesAdaptive sliding-mode voltage control enhances microgrid inverter performanceJose Luis Mata LedesmaNo ratings yet
- CAN Based Grid Synchronisation Technique of A Micro Grid With Renewable SourceDocument4 pagesCAN Based Grid Synchronisation Technique of A Micro Grid With Renewable SourceAstrid BelloNo ratings yet
- Khan 2013Document5 pagesKhan 2013RV SreehariNo ratings yet
- 000 - Coordinated VF - PQ Contl of PV Gen W MPPT and Battery Storage in MicroGrids PDFDocument12 pages000 - Coordinated VF - PQ Contl of PV Gen W MPPT and Battery Storage in MicroGrids PDFTrần Quang TuyênNo ratings yet
- 1 s2.0 S0378779623008337 MainDocument17 pages1 s2.0 S0378779623008337 MainS RoyNo ratings yet
- 4 PDFDocument12 pages4 PDFTRIAD TECHNO SERVICESNo ratings yet
- Effect of Wind-Energy Power Injection Into Weak GridsDocument7 pagesEffect of Wind-Energy Power Injection Into Weak GridsRoger RogerNo ratings yet
- ZZZZZZZZZZZZZZZZDocument19 pagesZZZZZZZZZZZZZZZZ4014 SharanNo ratings yet
- Modeling and Control of Power Electronic Converters for Microgrid ApplicationsFrom EverandModeling and Control of Power Electronic Converters for Microgrid ApplicationsNo ratings yet
- Lecture - 1Document5 pagesLecture - 1Dattaraya GaonkarNo ratings yet
- English 10 QBDocument364 pagesEnglish 10 QBDattaraya GaonkarNo ratings yet
- English 10 QBDocument364 pagesEnglish 10 QBDattaraya GaonkarNo ratings yet
- Microgrid Operation with Improved Droop Control and Islanding DetectionDocument16 pagesMicrogrid Operation with Improved Droop Control and Islanding DetectionDattaraya GaonkarNo ratings yet
- Bio - DPP - 18 Ganesha D Gaonkar 9 Kalpana ChawlaDocument1 pageBio - DPP - 18 Ganesha D Gaonkar 9 Kalpana ChawlaDattaraya GaonkarNo ratings yet
- An Adaptive Reactive Power Perturbation Based Hybrid Islanding Detection Method For Distributed Generation SystemsDocument12 pagesAn Adaptive Reactive Power Perturbation Based Hybrid Islanding Detection Method For Distributed Generation SystemsDattaraya GaonkarNo ratings yet
- Course Title Instructor E Mail Office EL Office Hours ExtbookDocument2 pagesCourse Title Instructor E Mail Office EL Office Hours ExtbookKhairi SalehNo ratings yet
- Em 111-Calculus 1 (Differential Calculus) : Graph of A FunctionDocument3 pagesEm 111-Calculus 1 (Differential Calculus) : Graph of A FunctionJohn Philip NadalNo ratings yet
- Practice Exam No. 4 2018 PDFDocument43 pagesPractice Exam No. 4 2018 PDFJevan CalaqueNo ratings yet
- Aluminium Dome Roof InstallationDocument7 pagesAluminium Dome Roof Installationmuhammad.younisNo ratings yet
- Dual Band Electromagnetic Band Gap EBG StructureDocument4 pagesDual Band Electromagnetic Band Gap EBG StructureNhật Minh TạNo ratings yet
- A10 A Pid Va 718602 201Document1 pageA10 A Pid Va 718602 201zhangNo ratings yet
- AcidEtching_WalkerDocument11 pagesAcidEtching_WalkermikeherrNo ratings yet
- 06.GTA-06 (p1) Question Paper S60Document20 pages06.GTA-06 (p1) Question Paper S60Motivational BabaNo ratings yet
- Electric Traction - ReferenceDocument19 pagesElectric Traction - ReferenceShrestha SanjuNo ratings yet
- Kruss Techdata SDT en PDFDocument4 pagesKruss Techdata SDT en PDFTravis HNo ratings yet
- X X X XX X X XX XXX - X: Nomenclature DetailsDocument3 pagesX X X XX X X XX XXX - X: Nomenclature DetailsAlvaro DiazNo ratings yet
- Finite Element Code Comparison: Recommended Investigation MethodologyDocument6 pagesFinite Element Code Comparison: Recommended Investigation MethodologyNisarg PatelNo ratings yet
- Mass S.Document17 pagesMass S.Yasasmi GunasekeraNo ratings yet
- EQ RESISTANT BALSA BUILDING SAP2000Document4 pagesEQ RESISTANT BALSA BUILDING SAP2000Irpan NugrahaNo ratings yet
- Esquema Elétrico 120HDocument2 pagesEsquema Elétrico 120HchicotwoNo ratings yet
- Worksheet MagnetismDocument3 pagesWorksheet MagnetismVenkyNo ratings yet
- Transmission of Data and Voice over Fiber-Optic LinksDocument21 pagesTransmission of Data and Voice over Fiber-Optic LinksBhegz EscalonaNo ratings yet
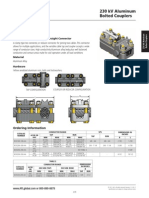
- 230kV Aluminum Bolted Cable Couplers PDFDocument5 pages230kV Aluminum Bolted Cable Couplers PDFCarloNo ratings yet
- Notice Inviting Quotation HLL KFC Ducting PDFDocument6 pagesNotice Inviting Quotation HLL KFC Ducting PDFAjeshNo ratings yet
- 7 Things That Affect Your Vibration Frequency From The Point of View of Quantum PhysicsDocument12 pages7 Things That Affect Your Vibration Frequency From The Point of View of Quantum PhysicsLluisNo ratings yet
- Brønsted-Lowry Theory of Acids and BasesDocument4 pagesBrønsted-Lowry Theory of Acids and Basescayla mae carlosNo ratings yet
- Mec 201 04 Aug 20Document18 pagesMec 201 04 Aug 20hemanth singhNo ratings yet
- Fire Alarm On Ms Word 22Document39 pagesFire Alarm On Ms Word 22Sandeep YapashettiNo ratings yet
- Unit 16 ExplanationDocument12 pagesUnit 16 ExplanationAnh MaiNo ratings yet
- Inkjet Nozzle Simulation Using Level Set MethodDocument18 pagesInkjet Nozzle Simulation Using Level Set MethodNEHA THAKUR 1982605No ratings yet
- Spur Gears Component GeneratorDocument4 pagesSpur Gears Component GeneratorRodrigo NavarreteNo ratings yet
- VLSI Digital Design Issues: Clock Skew, Distribution, Jitter and Power OptimizationDocument94 pagesVLSI Digital Design Issues: Clock Skew, Distribution, Jitter and Power Optimizationraghava06No ratings yet
- Vibrapac Maint PDFDocument211 pagesVibrapac Maint PDFJosé C. Canche DavidNo ratings yet
- Write Up On LPBP SystemDocument9 pagesWrite Up On LPBP SystemKhushboo PandeyNo ratings yet
- Emergency Fairlite LightingDocument3 pagesEmergency Fairlite LightingawadalmekawyNo ratings yet