You might also like
- RX PIXEL CP Series Sevice Manual 2Document290 pagesRX PIXEL CP Series Sevice Manual 2DiasarmaNo ratings yet
- Cubic Asnzs 61439 Standard Update Bro 001 enDocument8 pagesCubic Asnzs 61439 Standard Update Bro 001 enManav IyerNo ratings yet
- Set 2 (Unit 2)Document13 pagesSet 2 (Unit 2)Tare Er Kshitij64% (11)
- Superposition and Standing Waves: Conceptual ProblemsDocument88 pagesSuperposition and Standing Waves: Conceptual ProblemsnallilathaNo ratings yet
- Assignment 2Document2 pagesAssignment 2Venkitaraj K PNo ratings yet
- DC Motor Speed Control System - ED4400BDocument14 pagesDC Motor Speed Control System - ED4400BDanang Pradika Purnomo100% (1)
- Position and Speed Control of BLDC Motor Using Hall Sensor IJERTCONV3IS32015Document3 pagesPosition and Speed Control of BLDC Motor Using Hall Sensor IJERTCONV3IS32015DONE AND DUSTEDNo ratings yet
- Motion Control Engineering: Author: Tran CauDocument63 pagesMotion Control Engineering: Author: Tran CauLê Quốc ViệtNo ratings yet
- Electromechanical Systems CH 5Document46 pagesElectromechanical Systems CH 5fabrice mellantNo ratings yet
- M6 - C3 - Lesson 1 - System DevelopmentDocument34 pagesM6 - C3 - Lesson 1 - System DevelopmentsanthoshyeruvakaNo ratings yet
- Control System Lab EE-324-FDocument45 pagesControl System Lab EE-324-FBalraj SinghNo ratings yet
- Festo Glossary The Terminology of Electrical DrivesDocument3 pagesFesto Glossary The Terminology of Electrical DrivesadityavanamNo ratings yet
- (P1) Modul DC Motor Speed Control SystemDocument13 pages(P1) Modul DC Motor Speed Control SystemTito Bambang Priambodo - 6726No ratings yet
- Progress Seminar 15 October 2016Document20 pagesProgress Seminar 15 October 2016Abhinav KhandekarNo ratings yet
- Control System Lab EE-324-FDocument45 pagesControl System Lab EE-324-FDheeraj KumarNo ratings yet
- Machine - Lab Manual Merged PDFDocument14 pagesMachine - Lab Manual Merged PDFMubin LikhonNo ratings yet
- Design of PLC-based PI Controller For TH PDFDocument5 pagesDesign of PLC-based PI Controller For TH PDFRamesh SahniNo ratings yet
- EE 246 Electrical Machines For SE ELDocument42 pagesEE 246 Electrical Machines For SE ELFarah Andleeb SiddiquiNo ratings yet
- 2020-04-26 00 47 44basic Electrical EngineeringDocument80 pages2020-04-26 00 47 44basic Electrical EngineeringRohit SinghNo ratings yet
- Jabalpur Engineering College, Jabalpur Electrical Engineering Department AC/DC Drives Lab. List of ExperimentDocument63 pagesJabalpur Engineering College, Jabalpur Electrical Engineering Department AC/DC Drives Lab. List of ExperimentSajalNo ratings yet
- 220120end AVR With Static Excitation SystemDocument16 pages220120end AVR With Static Excitation SystemAdetunji Babatunde TaiwoNo ratings yet
- FACTS DevicesDocument19 pagesFACTS DevicesMAYANK SHARMANo ratings yet
- Servomotors: by Joseph M Abraham Aeronautical DeptDocument17 pagesServomotors: by Joseph M Abraham Aeronautical DeptibrahimNo ratings yet
- Emulated Ripple Technique Advances Hysteretic Switchmode Supplies Power Management DesignLineDocument4 pagesEmulated Ripple Technique Advances Hysteretic Switchmode Supplies Power Management DesignLineIvana PrezimeNo ratings yet
- Electric Drive Lab Laboratory Manual: Dev Bhoomi Institute Chakrata Road, Navgaoun Manduwala, UttarakhandDocument15 pagesElectric Drive Lab Laboratory Manual: Dev Bhoomi Institute Chakrata Road, Navgaoun Manduwala, Uttarakhandjaya mishraNo ratings yet
- Ac DC DriveDocument92 pagesAc DC DriveUmang JainNo ratings yet
- System and Automatic Control Lab (EC-218) : Experiment No. 5Document3 pagesSystem and Automatic Control Lab (EC-218) : Experiment No. 5arjunv_14No ratings yet
- G.H.Raisoni College of Enginering: Modified Integration Method For Direct Torque Control of Induction Motor DrivesDocument35 pagesG.H.Raisoni College of Enginering: Modified Integration Method For Direct Torque Control of Induction Motor DrivesAbhinav G. KhandekarNo ratings yet
- Class 27 - Modeling of Servo MotorsDocument25 pagesClass 27 - Modeling of Servo Motorsapi-26676616100% (1)
- Ee2257 LMDocument104 pagesEe2257 LMthamizmaniNo ratings yet
- week5-IM - Steady State ControlDocument54 pagesweek5-IM - Steady State Controlmostafashuqair0No ratings yet
- Analysis and Design of Chaos in Switched ReluctanceDocument20 pagesAnalysis and Design of Chaos in Switched ReluctanceRaaji NattuNo ratings yet
- A Review of Automatic Grid SynchronizatiDocument8 pagesA Review of Automatic Grid Synchronizaticharushila patelNo ratings yet
- Closed Loop Speed Control of A BLDC Motor Drive Prototype Using Position SensorDocument7 pagesClosed Loop Speed Control of A BLDC Motor Drive Prototype Using Position SensorKJLDSFMSKLNo ratings yet
- Tabla de Informacion Sobre Motores ElectricosDocument8 pagesTabla de Informacion Sobre Motores ElectricosAgustin BrianeseNo ratings yet
- Bahçeşehir University: 111equation Chapter 1 Section 1212equation Chapter 2 Section 1Document10 pagesBahçeşehir University: 111equation Chapter 1 Section 1212equation Chapter 2 Section 1Wael M. AbulafiNo ratings yet
- Modul 1 Simple Speed Control of DC MotorDocument11 pagesModul 1 Simple Speed Control of DC MotorBagas Ghosa HidajatNo ratings yet
- Control System Lab ManualDocument52 pagesControl System Lab ManualMohammad Umar RehmanNo ratings yet
- Practical TitleDocument16 pagesPractical TitleBigNo ratings yet
- Power System Iii: Automatic Generation Control (AGC)Document54 pagesPower System Iii: Automatic Generation Control (AGC)31Abhinav AkashNo ratings yet
- CEP Control System Sp2019V2Document3 pagesCEP Control System Sp2019V2Ahmed AkramNo ratings yet
- Advanced Electromechanical Systems Course Manual PDFDocument44 pagesAdvanced Electromechanical Systems Course Manual PDFAhmed M H Al-YousifNo ratings yet
- Practical TitleDocument16 pagesPractical TitleBigNo ratings yet
- Predictive Maintenance of Induction Motors With MCSA & TSA TechnologyDocument131 pagesPredictive Maintenance of Induction Motors With MCSA & TSA TechnologyMridu Ranjan SrivastavaNo ratings yet
- Speed Control of 3Ø AC Induction Motor Using VSI & MicrocontrollerDocument32 pagesSpeed Control of 3Ø AC Induction Motor Using VSI & MicrocontrollerVijay PrabhuNo ratings yet
- Lab 3 Squirrel Cage Induction Machine-1Document8 pagesLab 3 Squirrel Cage Induction Machine-1max100% (1)
- Design and Construction of Automatic Voltage Regulator For Diesel Engine Type Stand-Alone Synchronous GeneratorDocument7 pagesDesign and Construction of Automatic Voltage Regulator For Diesel Engine Type Stand-Alone Synchronous Generatorsunthron somchaiNo ratings yet
- Power Electronic Control of DC Motor DrivesDocument20 pagesPower Electronic Control of DC Motor DrivesThureinNo ratings yet
- ServomotorsDocument17 pagesServomotorsVi GaneshNo ratings yet
- 19 Speed PDFDocument8 pages19 Speed PDFNur Muhammad DzikriNo ratings yet
- Control System Lab ManualDocument76 pagesControl System Lab ManualYuvaraj Shan50% (2)
- P1 - DC Motor Position Control PDFDocument10 pagesP1 - DC Motor Position Control PDFSeptiani DitaNo ratings yet
- Electric Traction RailwaysDocument34 pagesElectric Traction Railwayssaurabh8435100% (1)
- Modelling of A Large Synchronous Generator and Computation of The Auto Reclosing Timing of The Circuit Breaker For Its Transient StabilityDocument23 pagesModelling of A Large Synchronous Generator and Computation of The Auto Reclosing Timing of The Circuit Breaker For Its Transient StabilityAnonymous zzMfpoBxNo ratings yet
- Syllignakis J. Et AlDocument14 pagesSyllignakis J. Et Alali ghalibNo ratings yet
- CS Lab ManualDocument28 pagesCS Lab Manualkcop111No ratings yet
- Unit-II - Engineering Design3 - EE - SUPPLY - & - MOTODocument53 pagesUnit-II - Engineering Design3 - EE - SUPPLY - & - MOTOAtul Jaysing PatilNo ratings yet
- Ps Lab ManualDocument132 pagesPs Lab ManualRamkrishnaNo ratings yet
- Position Control of Hybrid Stepper MotorDocument36 pagesPosition Control of Hybrid Stepper MotorAditya ChaudharyNo ratings yet
- Direct Torque Control For Induction Motor Using Intelligent Artificial Neural Network TechniqueDocument7 pagesDirect Torque Control For Induction Motor Using Intelligent Artificial Neural Network TechniqueInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Model Predictive Direct Torque Control Methods For SpeedDocument25 pagesModel Predictive Direct Torque Control Methods For SpeedAayush PatidarNo ratings yet
- Automatic Voltage Regulator in GensetDocument8 pagesAutomatic Voltage Regulator in GensetPravat Kumar BeheraNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Electrical Correcting Elements in Automatic Control and Regulation CircuitsFrom EverandElectrical Correcting Elements in Automatic Control and Regulation CircuitsNo ratings yet
- Simulation of Sensorless Permanent Magnetic Brushless DC Motor Control SystemDocument5 pagesSimulation of Sensorless Permanent Magnetic Brushless DC Motor Control SystemLê Quốc ViệtNo ratings yet
- Motion Control Engineering: Author: Tran CauDocument63 pagesMotion Control Engineering: Author: Tran CauLê Quốc ViệtNo ratings yet
- Feedback Linearizing ControlDocument59 pagesFeedback Linearizing ControlLê Quốc ViệtNo ratings yet
- Multivariable PID Control Design For Activated Sludge Process With Nitrification and DenitrificationDocument10 pagesMultivariable PID Control Design For Activated Sludge Process With Nitrification and DenitrificationLê Quốc ViệtNo ratings yet
- Disturbance Rejection Control For PMSM Using Integral Sliding ModeDocument15 pagesDisturbance Rejection Control For PMSM Using Integral Sliding ModeLê Quốc ViệtNo ratings yet
- The Ultimate Guide To: Light MeasurementDocument17 pagesThe Ultimate Guide To: Light MeasurementLê Quốc ViệtNo ratings yet
- Research On Modeling of BLDCM Control System Based On S-Function BuilderDocument5 pagesResearch On Modeling of BLDCM Control System Based On S-Function BuilderLê Quốc ViệtNo ratings yet
- A New Approach To Sensorless Control Method For BRDocument12 pagesA New Approach To Sensorless Control Method For BRLê Quốc ViệtNo ratings yet
- Review of Sensorless Methods For Brushless DC: Not inDocument8 pagesReview of Sensorless Methods For Brushless DC: Not inLê Quốc ViệtNo ratings yet
- Service Manual U CROWNDocument136 pagesService Manual U CROWNopodecanoNo ratings yet
- Assignment 2 Power Systems Paper November 2021 - (Paper)Document2 pagesAssignment 2 Power Systems Paper November 2021 - (Paper)Misango EmmanuelNo ratings yet
- FraunhoferIISB - Brochure - Compact & Lightweight Aviation Power ElectronicsDocument2 pagesFraunhoferIISB - Brochure - Compact & Lightweight Aviation Power ElectronicsSanjo ChackoNo ratings yet
- Manual Hypack 123-125Document6 pagesManual Hypack 123-125Freddy EscorzaNo ratings yet
- Manual Instalaciones Electricas para Centros de ComputoDocument65 pagesManual Instalaciones Electricas para Centros de ComputoJorge Estrada0% (3)
- Three PhaseDocument9 pagesThree Phaseuama87No ratings yet
- SS - 24 - Stability - PP 5283 H2 080 16 11 001Document29 pagesSS - 24 - Stability - PP 5283 H2 080 16 11 001vijayNo ratings yet
- 7.2 Coulomb's Law Sample ProblemsDocument7 pages7.2 Coulomb's Law Sample ProblemsMeeriya NewtonNo ratings yet
- Kinematics-Motion in One Dimension-1 JEE Main and AdvancedDocument6 pagesKinematics-Motion in One Dimension-1 JEE Main and Advancedharsh mishraNo ratings yet
- Modelling of Hybrid Electric Vehicle Charger and Study The Simulation ResultsDocument6 pagesModelling of Hybrid Electric Vehicle Charger and Study The Simulation ResultsNarendra YadavNo ratings yet
- Hvac Load Calculations of A VillaDocument72 pagesHvac Load Calculations of A VillaKhalil YoussefNo ratings yet
- Rotational Inertia FixDocument7 pagesRotational Inertia FixAndi Rafika Dwi RachmaNo ratings yet
- Modeling of Solar PV System Under Partial Shading Using Particle Swarm Optimization Based MPPTDocument7 pagesModeling of Solar PV System Under Partial Shading Using Particle Swarm Optimization Based MPPTAnonymous CUPykm6DZNo ratings yet
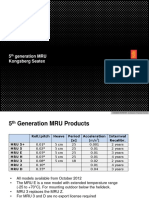
- 1 - MRU 5th Gen - PHFDocument28 pages1 - MRU 5th Gen - PHFDouglas BemficaNo ratings yet
- John Alexander - How To Become An Alpha MaleDocument7 pagesJohn Alexander - How To Become An Alpha MalestarchpressNo ratings yet
- Canup Moon Nature 01 PDFDocument5 pagesCanup Moon Nature 01 PDFArcibaldMilicNo ratings yet
- Recent Facts About Photovoltaics in GermanyDocument100 pagesRecent Facts About Photovoltaics in GermanyJayson LauNo ratings yet
- HR12-350WL (v.17)Document2 pagesHR12-350WL (v.17)GeorgeNo ratings yet
- Elementary School Science 4 Third Quarterly Examinations SY 2022-2023 Table of Specifications Learning CompetenciesDocument6 pagesElementary School Science 4 Third Quarterly Examinations SY 2022-2023 Table of Specifications Learning CompetenciesMichelle Delos SantosNo ratings yet
- Omnidirectional Guided Wave Inspection of Large Metallic Plate Structures Using An EMAT ArrayDocument13 pagesOmnidirectional Guided Wave Inspection of Large Metallic Plate Structures Using An EMAT ArraySiddharth ShankarNo ratings yet
- Science8 Q1 Module7 Cuurent-and-Charge V2-1Document26 pagesScience8 Q1 Module7 Cuurent-and-Charge V2-1Twela Dea Dela CruzNo ratings yet
- Expel Prosys Service CatalogDocument8 pagesExpel Prosys Service CatalogecplpraveenNo ratings yet
- Yocto v2.007 - Individual Voice PartListDocument19 pagesYocto v2.007 - Individual Voice PartListBenjamin JimenezNo ratings yet
- Job Safety Analysis Power Transformer TestingDocument8 pagesJob Safety Analysis Power Transformer TestingAnilPagoluNo ratings yet
- Relative VelocityDocument3 pagesRelative VelocityKanakSinghalNo ratings yet